青岛科技大学|物联网工程|物联网定位技术(第一讲)|6.7
目录
物联网定位技术(第一讲)
1. 什么是物联网定位技术?
2. 物联网定位技术主要有哪些?
3. 简述卫星定位系统的发展历史以及GPS的发展概况?
(1)卫星定位的由来和发展
(2)GPS的发展概况
a 空间卫星部分
b 控制部分
c 用户设备
4. 试述地心直角坐标系和大地坐标系
(1)地心直角坐标系
(2)大地坐标系
5. 请思考地心直角坐标和大地坐标是如何变换的?
6. 请思考不同坐标系间是如何相互转换的?
(1)不同地心直角坐标间的变换
(2)不同大地坐标的变换
7. 卫星运行有何规律?其轨道参数主要有哪些?
(1)卫星运行规律
(i)开普勒第一定律
(ii)开普勒第二定律
(iii)开普勒第三定律
(2)答:卫星在空间的位置可由以下6个轨道参数确定
8. 请给出开普勒第一、二、三定律
(i)开普勒第一定律
(ii)开普勒第二定律
(iii)开普勒第三定律
9. 请思考GPS卫星在空间的位置是如何计算的?
10. 请查阅北斗卫星定位系统的原理、特点和应用,与GPS相比有何优点?
(1)原理
(2)特点
(3)应用
军队特殊应用
公共领域的应急指挥救援系统
移动载体的位置监控
水文、气象、防汛、海洋等远程数据传输
精细农业作业
物联网定位技术(第一讲)
本讲的主要内容:
(1)学习物联网定位技术中的基本概念,GPS定位系统的基础;
(2)自学的主要内容:阅读《物联网定位技术1(GPS部分)》(已发给大家的word文档或PDF文档)中的1—15页,即学习到2.3节,不包括2.4导航卫星轨道参数的选择);
(3)思考与习题;
1. 什么是物联网定位技术?
答:所谓“物联网定位”,就是在所选定的坐标系中,确定“物”的坐标。所谓“物联网定位技术”就是采用某种测量和计算技术测量“物”在所选定坐标系中的坐标。对选定坐标系中“物”的定位,首先是测量其坐标系中的各维度的坐标,在实际应用中,我们所测量的空间是三维空间。因此,在定位测量中,一般需要测量“物”的三个维度的坐标。目前,用来测量的方法有多种方法,最简单的方法是用尺子来度量,最常用的方法是用光学测量。现在较常用的方法是用电磁来测量,主要有雷达测量、无线电波测量、激光测量等。
2. 物联网定位技术主要有哪些?
在物联网中常用的定位技术主要有GPS、WLAN、短距离无线测量、WSN、UWB(超宽带)、移动蜂窝测量技术。
3. 简述卫星定位系统的发展历史以及GPS的发展概况?
(1)卫星定位的由来和发展
1957 年 10 月 4 日,苏联发射了世界上第一颗人造地球卫星。它标志着人类 进入空间时代。
1958 年 12 月,美国海军武器实验宝委托霍普金斯大学应用物理研究室研制美国海军导弹潜艇用的卫星导航系统,即海军导航卫星系统(Navy Navigation Satellite System,NNSS)。
该系统 1964 年 1 月研制成功并交付使用。
1967 年和 1969 年先后发射了“Timation-I”和“Timation-II”两颗试验卫星。
与此同时,美国空军提出了“621-B”的全球定位系统计划;
1973 年美国国防部批准成立一个联合计划局,由美国海军、空军、陆军、国防制图局、交通部、北约等代表组成的机构,开始 GPS 全球定位系统的研究和论证工作。
1994 年 3 月 10 日将 24 颗卫星送入预定轨道,系统投入全面运行.
1996 年 1 月 18 日 GLonass 的 24 颗卫星的完满星座已经建成,系统投入正常运行。
(2)GPS的发展概况
GPS 的目的主要是为了军用,但已向民用开放,目前民用用户约占 90%。
a 空间卫星部分
空间卫星早期的方案是由分布在 3 个轨道面上的 24 颗卫星组成。后来,因美国国防预算缩减,改为分布在 6 个轨道面上的 18 颗卫星组成。但这个方案不能提供满意的全球覆盖而被否决了。大约在 1986 年计划卫星数增至 21 颗,即在 18 颗卫星星座的基础上增加了 3 颗有源在轨备用卫星。最后,实际星座是由 24 颗卫星组成,均匀分布在 6 个倾角为 550 轨道面上,其中三颗为有源在轨备用卫星。GPS 卫星由收发设备、操作系统和各种辅助设备、太阳能电池等组成。
美国在 1994 年 1 月 31 日在卫星上实施了反电子欺骗 A-S(Anti-Spooting) 的技术措施,将 P 码进一步加密编译成 Y 码。Y 码是 P 码与一个被称为 W 码的 密码模二相加而成的。这样,倘若发射虚假的 P 码信号进行电子欺骗,使对方产生错误定位,对方只要采用装有选择 Y 码附加芯片的 P 码接收机,不接收这种假信号,就可达到防止电子欺骗的目的。
b 控制部分
控制部分由一个主控站,5 个全球监测站和 3 个地面控制站组成,它的任务是跟踪所有自卫星,进行卫星轨道参数和卫星钟钟差测定,并将预测轨道修正参数和各个卫星的钟差数据注入卫星,它还有控制卫星飞行姿态、控制 SA 的大小和接通与不接通 A-S 等功能。
c 用户设备
GPS 用户设备包括 GPS 接收机和传感器。它的种类繁多,例如按工作原理可分为伪距法、载波相位法、多普勒法相干涉法接收机,按用途可分为导航、测量、跟踪、授时等接收机。
为了提高 GPS C/A 码的定位精度,消除 SA 的影响,出现了多种类型的差分 GPS(DGPS)技术。所谓差分 GPS 就是在位置确定的地点,建立差分 GPS 基准站、基准站的 GPS 接收机接收卫星信号,将实测的数据与计算的数据比较,得到基准站位置或基准站至卫星的伪距测量误差。将这些误差数据通过无线电波传递给用户,用户接收机以此来修正自身测定的数据,消除或减小各种因素引起的定位误差。DGPS 的精度主要取决于大气电离层相对流层的空间相关性,在用户与基准站的距离小于 l00 海里时,对大气电离层影响的修正有显著的作用,随着距离的增加此种修正作用减弱。但是,在不少高精度的应用中往往要求大于此距离,甚至要求构成高精度的大范围的导航网,于是产生 了 所谓广域差分GPS(WADGPS)。为了满足某些要求更高的用户需要,在 WADGPS 的基础上又出现广域增强型 GPS 系统(WAAS)
4. 试述地心直角坐标系和大地坐标系
(1)地心直角坐标系
卫星在空间运行的轨迹称为轨道,利用卫星进行定位必须把卫星轨道与地球 联系起来,使卫星和用户在一个坐标系中,求解卫星在这个坐标系中的瞬时位置。 地心直角坐标系又称空间直角坐标系。如图 2.1.1 所示,它是以地球的地心 O 为原点,XOY 平面在赤道面上,OX 正向指向格林尼治子午线与赤道的交点,OZ轴指向地球北极与地球极轴重合。该坐标系与地球紧密结合在一起,随着地球旋转而转动。
(2)大地坐标系
大地坐标系是大地测量中以参考椭球面为基准面建立起来的坐标系。地面点的位置用大地经度、大地纬度和大地高度表示。大地坐标系的确立包括选择一个椭球、对椭球进行定位和确定大地起算数据。
5. 请思考地心直角坐标和大地坐标是如何变换的?
 其中N为东西圆曲率半径,a为长半轴;b为短半轴。
其中N为东西圆曲率半径,a为长半轴;b为短半轴。
6. 请思考不同坐标系间是如何相互转换的?
(1)不同地心直角坐标间的变换
(2)不同大地坐标的变换
7. 卫星运行有何规律?其轨道参数主要有哪些?
(1)卫星运行规律
当卫星运动速度超过第一字亩速度(7.9lkm/s)时,在地球引力作用下,它将不停地绕地球运行。德国天文学家开普勒根据对卫星运行情况的长期观测结果,得出了卫星绕着太阳或地球运动的三个基本定律。
(i)开普勒第一定律
开普勒第一定律表述为:卫星的运动轨道是以地球质心(简称地心)为一焦点的椭圆。
(ii)开普勒第二定律
开普勒第二定律表示为:卫星运动的地心向径在相同的时间内所扫过的面积相等。
(iii)开普勒第三定律
开普勒第三定律表述为:卫星运动周期的平方与轨道椭圆长半轴的立方成正比。
(2)答:卫星在空间的位置可由以下6个轨道参数确定
(1)轨道倾角
(2)升交点赤径![]()
(3)近地点角距![]()
(4)轨道椭圆长半轴![]()
(5)轨道椭圆偏心率![]()
(6)真近点角![]()
8. 请给出开普勒第一、二、三定律
(i)开普勒第一定律
开普勒第一定律表述为:卫星的运动轨道是以地球质心(简称地心)为一焦点的椭圆。
(ii)开普勒第二定律
开普勒第二定律表示为:卫星运动的地心向径在相同的时间内所扫过的面积相等。
(iii)开普勒第三定律
开普勒第三定律表述为:卫星运动周期的平方与轨道椭圆长半轴的立方成正比。
9. 请思考GPS卫星在空间的位置是如何计算的?
利用卫星定位必须首先计算卫星的位置,然后根据卫星所在位置和对卫星的 观测量(在 GPS 中为伪距或相位)计算观测点的位置。GPS 卫星通过发播电文 向用户提供有关卫星轨道参数等信息,此类信息称为导航电文。卫星位置的计算 就是以导航电文中给出的某些参数按以下步骤进行的。
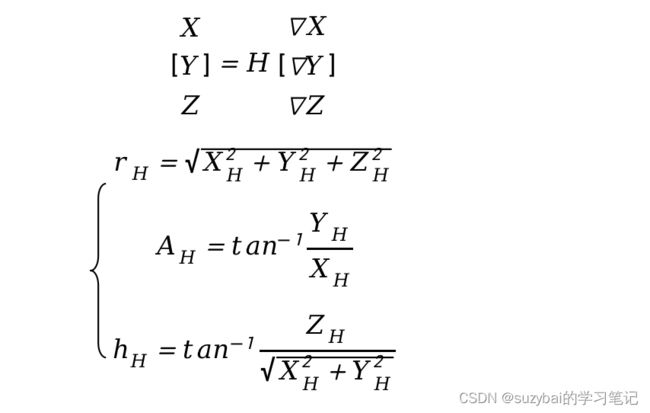
由上式求得卫星在站心坐标系中的瞬时位置,即卫星与测站之间的瞬时距离、卫星高度角和方位角。用户根据这些测量值了解卫星在空间的分布,由此选择最佳的卫星组合
10. 请查阅北斗卫星定位系统的原理、特点和应用,与GPS相比有何优点?
(1)原理
北斗卫星定位系统 是全球卫星定位系统的一种,他工作的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。
(2)特点
北斗卫星定位系统具有定位、授时和短报文通信功能。而GPS具有定位和授时功能。所以你要说是特点,可以理解为北斗系统具有其他系统 不具有的卫星短信功能。