高速缓存(cache)的原理: 了解计算机架构与性能优化
计基之存储器层次结构
Author: Once Day Date: 2023年5月9日
长路漫漫,而今才刚刚启程!
本内容收集整理于《深入理解计算机系统》一书。
参看文档:
- 捋一捋Cache - 知乎 (zhihu.com)
- iCache和dCache一致性 - 知乎 (zhihu.com)
- Cache设计总结 - 知乎 (zhihu.com)
文章目录
-
-
- 计基之存储器层次结构
-
- 1. 概述
-
- 1.1 随机访问存储器(Random-Access Memory, RAM)
- 1.2 局部性原理(principle of locality)
- 1.3 缓存(caching)
- 2. 高速缓存存储器
-
- 2.1 通用高速缓存存储器的组织结构
- 2.2 直接映射高速缓存(direct-mapped cache)
- 2.3 直接映射高速缓存实例分析
- 2.4 组相联高速缓存(set associative cache)
- 2.5 全相联高速缓存
- 3. 高速缓存性能分析
-
- 3.1 写回问题
- 3.2 真实缓存结构的剖析
- 3.3 高速缓存参数的性能影响
- 3.4 编写对高速缓存友好的代码
- 3.5 分块(blocking)技术
-
1. 概述
在理想的环境下,存储器系统是一个线性的字节数组,而CPU能够在一个常数时间内访问每个存储器的位置。
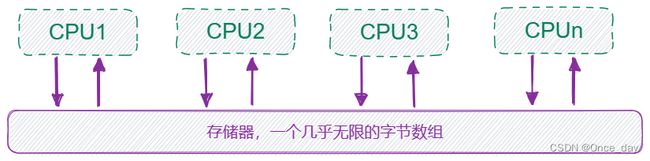
但实际上,存储器系统(memory system)是一个具有不同容量、成本和访问时间的存储设备的层次结构:
- CPU寄存器保存着最常用的数据。
- 接着是小的、快速的高速缓存存储器(cache memory).
- 然后是慢速,但容量较大的主存储器(main memory),里面存着指令和数据。
- 再往下就是容量更大的磁盘、硬盘、云盘、磁带、网络等等实际或虚拟存储器。

程序一般偏向局部性原理,因此在大多时候,访问的都是某一段位置的内容,这意味这种层次的结构,可以在成本和效率之间取得良好的平衡。
一般而言,存储在寄存器上的数据,0个周期就可以直接访问,存在高速缓存的数据需要4~75个周期,主存的数据需要上百个周期,而在磁盘上的数据,可能需要上百万个周期才能访问。
1.1 随机访问存储器(Random-Access Memory, RAM)
随机访问存储器分为两类:静态SRAM和动态DRAM。SRAM一般更贵,因此其容量较小,一般为几兆字节。
静态SRAM将每个位存储在一个双稳态的存储器单元里,每个单元是利用一个晶体管电路实现的,该电路有一个属性,可以无限期地保存在两个不同的电压配置或者状态下,其他任何状态都是不稳定的。即使遭遇电子噪声,也可以恢复到稳定状态。
动态DRAM将每个位使用电容存储,其更加敏感,有很多原因导致其电容电压改变,因此需要周期性刷新每一个位的值(数十毫秒)。
1.2 局部性原理(principle of locality)
一个编程良好的计算机程序常常具有良好的局部性(locality),倾向于引用邻近于其他最近引用过的数据项,或者最近引用过的数据项本身。通常有如下两种形式:
- 时间局部性(temporal locality),被引用过一次的内存位置在不远的将来再被多次引用。
- 空间局部性(spatial locality),一个内存位置被引用了一次,那么程序可能将不远的将来引用附近的位置。
局部性原理是一种通用的性能优化技巧,有良好局部性的程序比局部性差的程序运行得快。例如硬件高速缓存,操作系统用DRAM来缓存磁盘内容。
下面是一个数据引用局部性的例子,二维数组求和:
# 步长为1
for (int i = 0; i < M; i++){
for (int j = 0; j < N; j++) {
sum += g_data[i][j];
}
}
# 步长为N=1000=M
for (int i = 0; i < M; i++){
for (int j = 0; j < N; j++) {
sum += g_data[j][i];
}
}
在测试设备上,步长1的耗费时间仅为步长N的三分之一。
像第一个循环这样的顺序访问一个向量的每个元素,认为其具有步长为1的引用模式(stride-1 reference pattern),步长为1的引用模式也称为顺序引用模式(sequential reference pattern)。随着步长增加,空间局部性下降。
一般局部性的基本思想如下:
- 重复引用相同的变量具有良好的时间局部性。
- 对于具有步长为k的引用模式程序,步长越小,空间局部性越好。
- 对于取指令来说,循环有好的时间和空间局部性。
1.3 缓存(caching)
一般而言,高速缓存(cache)是一个小而快速的存储设备,作为存储在更大,也更慢的设备中的数据对象的缓冲区域。使用高速缓存的过程称为缓存(caching)。
缓存命中:当程序需要K+1层的某个数据对象d时,如果d刚好缓存在第k层中。
缓存不命中:如果第K+1层中没有缓存数据对象d,那么就是缓存不命中(cache miss)。
当发现缓存不命中时,第K层的缓存会去第K-1层中取出包含d的那个块,如果第k层的缓存已经满了,可能就会覆盖现存的一个块。
覆盖现存块的过程称为替换(replacing)或驱逐(evicting)这个块。被驱逐的块也有时被称为牺牲块(victim block)。
决定替换哪个块是由缓存的替换策略决定的,如随机替换和最少使用替换。
缓存不命中有如下种类:
- 空缓存一般称为冷缓存(cold cache),此类不命中称为强制性不命中(compulsory miss)或冷不命中(cold miss)。
- 限制性的放置策略同样会引起不命中,称为冲突不命中(conflict miss),因此这些数据对象会映射到同一个块中。
- 程序每个阶段访问的缓存块集合是不一样的,即工作集。当工作集大小超过缓存大小时,缓存会经历容量不命中(capacity miss)。
一般L1/L2/L3高速缓存都是按照64字节的内存块来缓存。
2. 高速缓存存储器
2.1 通用高速缓存存储器的组织结构
假设一个计算机系统,其每个存储器地址有m位,形成 M = 2 m M=2^m M=2m个不同的地址。
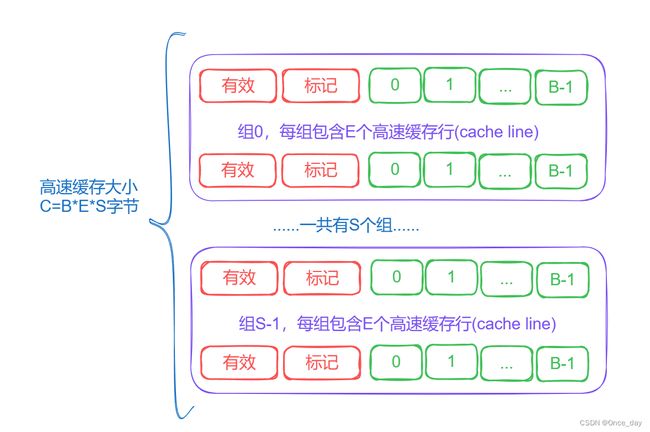
然后机器的高速缓存被组织成一个有 S = 2 s S=2^s S=2s个高速缓存组(cache set)的数组,每个组包含E个高速缓存行(cache line)。每一个行都是由一个 B = 2 b B=2^b B=2b字节的数据块(block)组成,一个有效位(valid bit)指明这个行是否包含有意义的信息,还有 t = m − ( b + s ) t=m-(b+s) t=m−(b+s)个标记位(tag bit),是当前块的内存地址的位的一个子集,唯一标识存储在这个高速缓存行中的块。
高速缓存的结构一般可以用元组(S, E, B, m)来描述,高速缓存的容量指的是所有块的大小的和,标记位和有效位不包括在内,因此 C = S ∗ E ∗ B C=S*E*B C=S∗E∗B。
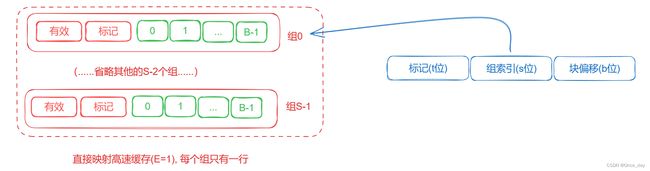
高速缓存将m位的地址划分成以下的结构:
|-(高位)--------------m位------------(低位)-|
|--标记(t位)--|--组索引(s位)--|--块偏移(b位)--|
一般有以下的符号参数:
| 参数 | 描述 | 衍生量 |
|---|---|---|
| S = 2 s S=2^s S=2s | 组数 | s = l o g 2 ( S ) s=log_2(S) s=log2(S),组索引位数量 |
| E | 每个组的行数 | |
| B = 2 b B=2^b B=2b | 块大小(字节) | b = l o g 2 ( B ) b=log_2(B) b=log2(B),块偏移位数量 |
| m = l o g 2 ( M ) m=log_2(M) m=log2(M) | (主存)物理地址位数 | t = m − ( s + b ) t=m-(s+b) t=m−(s+b), 标记位数量 |
2.2 直接映射高速缓存(direct-mapped cache)
根据每个组的高速缓存行数E,高速缓存被分为不同的类。每个组只有一行(E=1)的高速缓存称为直接映射高速缓存。

对于一个简单的系统,如cpu+寄存器+L1缓存+DRAM。当CPU执行一个读取内存字w的指令时,它向L1高速缓存请求这个字,如果L1高速缓存有w的一个缓存的副本,那么就得到L1高速缓存命中。
如果高速缓存不命中,此时L1高速缓存会向主存DRAM请求包含w块的一个副本时,CPU必须等待。
最终L1高速缓存里面会包含w块的一个副本,然后从该缓存块中抽出字w,并返回给CPU。
缓存确定一个请求是否命中,然后抽出来被请求字的过程,分为三步:
- (1) 组选择
- (2) 行匹配
- (3) 字抽取
如下所示,直接从w的地址中间抽取出s个组索引位,这些位被解释成一个对应于一个组号的无符号整数。
利用s个组索引位组成的索引,即可找到对应的缓存块。对于直接映射高速缓存,因为每组只有一行,因此直接判断有效位和标记是否匹配。如果有效位被设置,且标记匹配,那么这一行中包含w的一个副本。
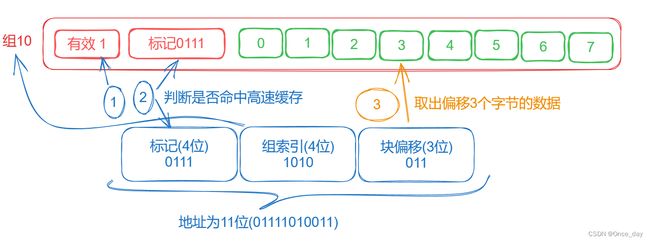
如上所示,如果(1)(2)两步判断不成立,那么就是缓存不命中。地址的最低几位是块偏移位,其大小受块大小限制,一般的cache line大小是64字节,因此偏移位一般为6位。
直接映射高速缓存不命中时的行替换策略很简单,直接用新取出来的行替换当前行即可。
2.3 直接映射高速缓存实例分析
加深对高速缓存运行过程的理解,最好的方式是实际模拟一下具体的情况。
假设一个实例如下:
( S , E , B , m ) = ( 4 , 1 , 2 , 4 ) (S,E,B,m) = (4,1,2,4) (S,E,B,m)=(4,1,2,4)
即高速缓存有4个组,每个组一行,每一行的缓存块有2个字节,地址位有4位,字长(word)为1个字节。下面列出全部情况:
| 地址m | 标记位(t=1) | 索引位(s=2)(二进制) | 偏移位(b=1) | 块号 |
|---|---|---|---|---|
| 0 | 0 | 00 | 0 | 0 |
| 1 | 0 | 00 | 1 | 0 |
| 2 | 0 | 01 | 0 | 1 |
| 3 | 0 | 01 | 1 | 1 |
| 4 | 0 | 10 | 0 | 2 |
| 5 | 0 | 10 | 1 | 2 |
| 6 | 0 | 11 | 0 | 3 |
| 7 | 0 | 11 | 1 | 3 |
| 8 | 1 | 00 | 0 | 4 |
| 9 | 1 | 00 | 1 | 4 |
| 10 | 1 | 01 | 0 | 5 |
| 11 | 1 | 01 | 1 | 5 |
| 12 | 1 | 10 | 0 | 6 |
| 13 | 1 | 10 | 1 | 6 |
| 14 | 1 | 11 | 0 | 7 |
| 15 | 1 | 11 | 1 | 7 |
从上图可以看出:
- 标记位和索引位唯一标识了内存中的每个块。
- 一共有8个块,但只有4个高速缓存组,因此多个块会映射到同一个高速缓存组中,这些块具有相同的组索引。
- 映射到同一个高速缓存组的块由标记位唯一标识。
下面执行一次模拟运行:
-
初始时,高速缓存是空的,因此四个缓存组情况如下:
|---组---|---有效位----|----标记位----|----块[0]----|----块[1]----| 0 0 1 0 2 0 3 0 -
读取地址0的字,此时发生缓存不命中,属于
cold cache,此时高速缓存从内存中取出块0,并把这个块存储在组0中,即地址m[0]和m[1]的内容,然后返回m[0]的内容。|---组---|---有效位----|----标记位----|----块[0]----|----块[1]----| 0 1 0 m[0] m[1] 1 0 2 0 3 0 -
读取地址1的字,此时命令高速缓存,因此直接从高速缓存组[0]的块[1]中拿取m[1]的值。
-
读取地址13的字,由于组[2]中高速缓存行不是有效的,所以有缓存不命中,高速缓存行把块[6]加载到组[2]中,然后从新的高速缓存行组[2]的块[1]中返回m[13]。
|---组---|---有效位----|----标记位----|----块[0]----|----块[1]----| 0 1 0 m[0] m[1] 1 0 2 1 1 m[12] m[13] 3 0 -
读取地址8的字,这会发生缓存不命中,组0中的高速缓存行虽然有效,但标记不匹配,高速缓存将块4加载到组0中,替换原来的数据,然后从新的块[0]中返回m[8]。
|---组---|---有效位----|----标记位----|----块[0]----|----块[1]----| 0 1 1 m[8] m[9] 1 0 2 1 1 m[12] m[13] 3 0 -
读取地址0的字,这又会发生缓存不命中,前面替换过块0。这是典型的容量足够,但由于缓存冲突造成的不命中。
这种高速缓存反复地加载和驱逐相同的高速缓存块的组的现象,一般称为抖动。如下所示:
float dotprod(float x[8], float y[8])
{
float sum =0.0;
int i;
for (i = 0; i < 8; i++) {
sum += x[i] * y[i];
}
return sum;
}
虽然上面这个函数具有良好的空间局部性,但是如果x地址和y地址之差刚好等于高速缓存大小的整数倍,那么就会映射到同一个缓存组上,容易产生缓存冲突。
2.4 组相联高速缓存(set associative cache)
直接映射高速缓存中冲突不命中造成的问题源于每个组只有一行,组相联高速缓存放松了该限制,每个组都保存有多于一个的高速缓存行,即 1 < E < C / B 1
组相连高速缓存的组选择和直接映射高速缓存没有区别,都是使用组索引位标识组。
不同的是组相连高速缓存中每个组有多个行,可以将每个组看成一个相连存储器,即(key, value)的数组,返回对应的value值,key即由标记位和有效位组成。
组相连高速缓存的每个组中任何一行,都可以包含任何映射到这个组的内存块,因此高速缓存必须搜索组中的每一个行,寻找一个有效的行,其标记与地址中的标记相匹配。
如果CPU请求的字不在组的任何一行中,那么就是缓存不命中,高速缓存必须从内核中取出包含这个字的块。如果该组中存在空行,那么直接替换空行是个不错的选择。
如果该组中没有空行,必须从中选择一个非空的行,策略一般如下(一般代码编程是无需关心此点):
- 随机替换策略
- 最不常使用策略(Least-Frequently)
- 最近最少使用策略(Least-Recently-Used, LRU)
2.5 全相联高速缓存
全相联高速缓存(fully associative cache),是由一个包含所有高速缓存行的组( E = C / B E=C/B E=C/B)组成的。
全相联高速缓存中的组选择非常简单,因为只有一个组,地址中没有组索引位,地址只被划分为一个标记和一个块偏移。
全相联高速缓存的行匹配和字选择与组相联高速缓存是一致的,但是构建一个又大又快的全相联高速缓存很困难,一般来说容量较小。典型的例子是虚拟内存系统中的翻译备用缓冲器(TLB)。
3. 高速缓存性能分析
3.1 写回问题
相比较于读取高速缓存,写回的问题会更加复杂一些。
假设写一个已经缓存的字w(写命中,write hit),在高速缓存更新了它的w副本以后,如何更新更低层次的副本呢?如下:
- 直写(write-through),最简单的方法,就是立即将w的高速缓存块写回到紧接着的低一层中。缺点是每次都会引起总线流量。
- 写回(write-back),尽可能推迟更新,只有当替换算法要驱逐这个更新过的块时,才把它写到紧接着的低一层中。缺点是会增加处理逻辑的复杂性。
当面临写不命中时,有以下的处理方法:
- 写分配(write-allocate),加载相应的低一层块到高速缓存中,然后更新这个高速缓存块。该方法试图利用写的空间局部性,但是缺点是每次不命中都会导致一个块从低一层传送到高速缓存。
- 非写分配(not-write-allocate),避开高速缓存,直接把这个字写到低一层中。
直接高速缓存通常是非写分配的,写回高速缓存通常是写分配的。
现代CPU的高速缓存一般使用写回策略。写回策略是指在修改高速缓存中的数据时,不立即写回主存,而是将修改后的数据标记为“脏数据”,并等待下一次需要替换该缓存行时再将脏数据写回主存。这种策略可以减少对主存的写入次数,提高系统性能。
相比之下,直写策略则是在修改高速缓存中的数据时立即将其写回主存,这会导致频繁的主存写入,降低系统性能。
因此,写回策略通常比直写策略更为常见,也更为优秀。但是,写回策略也可能会导致数据不一致的问题,需要进行合理的缓存一致性协议设计来解决。
一般可以假设现代系统使用写回和写分配的方式,这与读取的方式对称(但具体细节仍和处理器细节有关)。
其次,可以在高层次开发我们的程序,展示良好的空间和时间局部性,而不是试图为某个存储器进行优化。
3.2 真实缓存结构的剖析
只保存指令的高速缓存称为i-cache,只保存程序数据的高速缓存称为d-cache,既保存数据也保存命令的高速缓存称为统一的高速缓存(unified cache)。
i-cache 的优点:
- 加速指令的获取:i-cache 可以缓存 CPU 需要执行的指令,减少了从主存中获取指令的时间,从而提高了程序的执行速度。
- 减少指令访问冲突:由于指令通常是按照程序的执行顺序依次执行的,因此 i-cache 的访问模式比较规律,不容易出现访问冲突。
i-cache 的缺点:
- 浪费一部分缓存容量:由于指令通常是按照程序的执行顺序依次执行的,因此 i-cache 中存储的指令可能会比较连续,这导致了一些缓存行可能存储的是不必要的指令,从而浪费了一部分缓存容量。
- 缓存失效对程序的影响较大:如果 i-cache 中的缓存行失效,CPU 就需要从主存中重新获取指令,这会导致较大的性能损失。
d-cache 的优点:
- 加速数据的读写:d-cache 可以缓存 CPU 需要读写的数据,减少了从主存中获取数据的时间,从而提高了程序的执行速度。
- 支持多种访问模式:与 i-cache 不同,d-cache 中存储的数据可能会被多个线程或者进程同时访问,因此 d-cache 支持多种访问模式,包括读、写、读写等模式,能够更好地适应多线程程序的需求。
d-cache 的缺点:
- 容易出现访问冲突:由于数据的访问模式比较随机,因此 d-cache 的访问模式比较不规律,容易出现访问冲突,从而影响程序的执行效率。
- 可能会出现一致性问题:由于 d-cache 中存储的是 CPU 需要修改的数据,如果多个线程或进程同时访问同一块数据,就可能出现一致性问题。为了解决这个问题,需要采用一些同步机制,例如锁或原子操作等,这会增加程序的复杂度和开销。
下面是Intel Core i7处理器的高速缓存层次结构,用于参考(来自《深入理解计算机》第六章)。
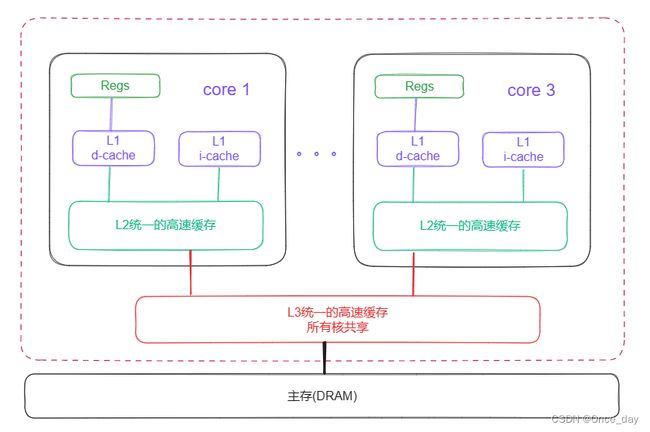
相关数据总结如下:
| 高速缓存类型 | 访问时间(周期) | 高速缓存大小© | 相联度(E) | 块大小(B) | 组数(S) |
|---|---|---|---|---|---|
L1 i-cache |
4 | 32KB | 8 | 64B | 64 |
L1 d-cache |
4 | 32KB | 8 | 64B | 64 |
| L2统一的高速缓存 | 10 | 256KB | 8 | 64B | 512 |
| L3统一的高速缓存 | 40~75 | 8MB | 16 | 64B | 8192 |
3.3 高速缓存参数的性能影响
下面是常见的衡量高速缓存性能的指标:
- 不命中率(miss rate),指在访问高速缓存时,所需数据在缓存中找到的次数(hits)相比于没有找到的次数(不命中数量/引用数量)。
- 命中率(hit rate),命中内存引用比率,它等于
1 - 不命中率。 - 命中时间(hit time),从高速缓存传送一个字到CPU所需的时间,包括组选择、行确认和字选择的时间。对于L1高速缓存来说, 命中时间的数量级是几个时钟周期。
- 不命中处罚(miss penalty),由于不命中所需要的额外时间,L1不命中需要从L2得到服务的处罚,通常是数10个周期,从L3得到服务的处罚,50个周期,从主存得到服务的处罚,200个周期。
高速缓存的大小、块大小、相联度和写策略等指标都会对高速缓存的性能产生影响,具体如下:
- 高速缓存大小:高速缓存大小是指缓存可以存储的数据量。缓存大小越大,可以缓存的数据就越多,命中率也有可能更高。但是,缓存大小也受到制造成本和功耗等因素的限制。
- 块大小:块大小是指高速缓存中每个缓存块可以存储的数据量。块大小的选择会影响缓存的命中率和访问延迟。较小的块大小可以提高命中率,因为可以更精细地缓存数据,但会增加访问延迟和标签存储器的开销。较大的块大小可以减少访问延迟,但会降低命中率,因为每次缓存块的替换会导致更多的数据失效,从而降低命中率。
- 相联度:相联度是指高速缓存中每个缓存块可以映射到多少个缓存行中。相联度的选择会影响缓存的命中率和访问延迟。较低的相联度可以减少访问延迟,因为每个缓存块只需要查找一个缓存行就可以了,但会降低命中率,因为如果多个缓存块映射到同一个缓存行中,就会发生冲突。较高的相联度可以提高命中率,因为每个缓存块可以映射到多个缓存行中,从而减少了冲突,但会增加访问延迟和标签存储器的开销。
- 写策略:写策略是指当 CPU 对缓存进行写操作时,缓存如何处理数据的更新。常见的写策略有写回和写直两种。写回策略是指当 CPU 对缓存进行写操作时,数据先被写入到缓存中,而不是立即写入主存。这样可以减少对主存的访问,提高性能。但也会增加缓存的复杂度和一致性问题。写直策略是指当 CPU 对缓存进行写操作时,数据会直接被写入到主存中。这样可以保证数据的一致性,但会增加对主存的访问,降低性能。
3.4 编写对高速缓存友好的代码
高速缓存友好(cache friendly)的代码,首先要具备良好的局部性,核心原则有两个:
- 让最常见的情况运行得快,忽略一些细枝末节的路径,专注于最核心的路径。
- 尽量减少每个循环内部的缓存不命中数量。
编写缓存友好的代码是一种优化技术,旨在最大化高速缓存的使用效率,从而提高程序的性能。以下是一些编写缓存友好的代码的实践方法:
- 空间局部性:高速缓存通常是以缓存块为单位进行管理的,因此,如果程序中的数据访问模式比较局部,即对相邻的数据进行访问,就可以提高缓存的命中率。
- 时间局部性:高速缓存中存储的数据通常是最近访问过的数据。因此,如果程序中的数据访问模式比较重复,即对同一块数据进行多次访问,就可以提高缓存的命中率。
- 数据对齐:高速缓存通常是按照缓存块的大小进行管理的,因此,如果程序中的数据没有对齐到缓存块的边界,就会导致跨越缓存块边界的访问,从而降低缓存的命中率和性能。
- 循环展开:循环展开是一种优化技术,可以将循环中的代码复制多次,以减少循环的迭代次数,从而提高程序的性能。循环展开可以提高空间局部性和时间局部性,从而提高缓存的命中率和性能。
- 编写缓存友好的算法:一些算法具有良好的缓存局部性,例如矩阵乘法和卷积等算法。
- 避免缓存污染:缓存污染是指缓存中存储了不必要的数据,从而降低了缓存的命中率和性能。可以使用局部变量和静态变量等技术,以减少对全局变量和动态分配内存的访问,从而提高缓存的命中率和性能。
- 避免缓存冲突:缓存冲突是指多个数据映射到同一个缓存块中,从而导致数据的互相替换,降低缓存的命中率和性能。可以使用不同的数据结构和算法等技术,以减少数据的冲突,从而提高缓存的命中率和性能。
3.5 分块(blocking)技术
分块技术(Blocking)是一种用于提高时间局部性(temporal locality)的优化技术。时间局部性描述了程序在一段时间内多次访问相同数据的趋势。利用时间局部性可以减少缓存未命中(cache miss)的数量,从而提高程序的执行速度。
分块技术的核心思想是将大的数据结构划分为较小的块(block),以便它们可以适应缓存的大小。访问这些较小的块时,程序会在较短的时间内多次访问相同的数据,从而提高缓存利用率。分块技术在许多领域都有应用,例如矩阵乘法、图像处理和数据库查询优化等。
下面以矩阵乘法为例,介绍如何使用分块技术提高时间局部性。
假设我们有两个矩阵 A 和 B,它们的大小分别为 N x N。我们要计算这两个矩阵的乘积 C = A x B。传统的矩阵乘法算法如下:
for i in range(N):
for j in range(N):
for k in range(N):
C[i][j] += A[i][k] * B[k][j]
这种实现方式存在缓存未命中的问题,因为数据访问的局部性较差。为了提高时间局部性,我们可以使用分块技术,将矩阵 A、B 和 C 划分为较小的子矩阵。假设我们使用 blockSize x blockSize 的块大小,分块后的矩阵乘法算法如下:
for i in range(0, N, blockSize):
for j in range(0, N, blockSize):
for k in range(0, N, blockSize):
for ii in range(i, min(i + blockSize, N)):
for jj in range(j, min(j + blockSize, N)):
for kk in range(k, min(k + blockSize, N)):
C[ii][jj] += A[ii][kk] * B[kk][jj]
通过这种方式,我们将大矩阵划分为较小的子矩阵,并在子矩阵间进行计算。这样可以提高缓存利用率,因为在较短时间内会多次访问相同的数据。同时,分块技术可以根据硬件特性调整 blockSize 的大小,以适应不同的缓存结构。
需要注意的是,分块技术并不总是能提高性能,它需要根据特定的程序和硬件环境进行优化。在实际应用中,程序员需要对所处理的问题有深入了解,并根据具体情况选择适当的优化方法。