STM32信号量
目录
什么是信号量?
什么是二值信号量?
二值信号量相关 API 函数
1. 创建二值信号量
2. 释放二值信号量
3. 获取二值信号量
实操
实验需求
cubeMX配置编辑
代码实现
计数型信号量
什么是计数型信号量?
计数型信号量相关 API 函数
实操
实验需求
cubeMX配置
代码实现
什么是信号量?
信号量( Semaphore ),是在多任务环境下使用的一种机制,是可以用来保证两个或多个关键代
码段不被并发调用。
信号量这个名字,我们可以把它拆分来看,信号可以起到通知信号的作用,然后我们的量还可以
用来表示资源的数量,当我们的量只有 0 和 1 的时候,它就可以被称作二值信号量,只有两个状
态,当我们的那个量没有限制的时候,它就可以被称作为计数型信号量。
信号量也是队列的一种
什么是二值信号量?

二值信号量其实就是一个长度为 1 ,大小为零的队列,只有 0 和 1 两种状态,通常情况下,我们用
它来进行互斥访问或任务同步。
互斥访问:比如门钥匙,只有获取到钥匙才可以开门
任务同步:比如我录完视频你才可以看视频
二值信号量相关 API 函数
|
函数
|
描述
|
|
xSemaphoreCreateBinary()
|
使用动态方式创建二值信号量
|
|
xSemaphoreCreateBinaryStatic()
|
使用静态方式创建二值信号量
|
|
xSemaphoreGive()
|
释放信号量
|
|
xSemaphoreGiveFromISR()
|
在中断中释放信号量
|
|
xSemaphoreTake()
|
获取信号量
|
|
xSemaphoreTakeFromISR()
|
在中断中获取信号量
|
1. 创建二值信号量
SemaphoreHandle_t xSemaphoreCreateBinary ( void )
参数:
无
返回值:
成功,返回对应二值信号量的句柄;
失败,返回 NULL 。
2. 释放二值信号量
BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore )
参数:
xSemaphore :要释放的信号量句柄
返回值:
成功,返回 pdPASS ;
失败,返回 errQUEUE_FULL 。
3. 获取二值信号量
BaseType_t xSemaphoreTake ( SemaphoreHandle_t xSemaphore , TickType_t xTicksToWait );
参数:
xSemaphore :要获取的信号量句柄
xTicksToWait :超时时间, 0 表示不超时, portMAX_DELAY 表示卡死等待;
返回值:
成功,返回 pdPASS ; 失败,返回 errQUEUE_FULL 。
实操
实验需求
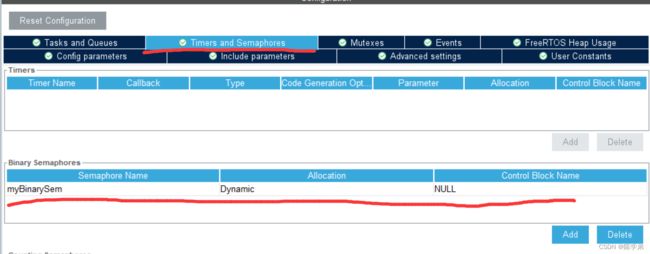
创建一个二值信号量,按下 KEY1 则释放信号量,按下 KEY2 获取信号量。
cubeMX配置
代码实现
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* Create the semaphores(s) */
/* definition and creation of myBinarySem */
osSemaphoreDef(myBinarySem);
//myBinarySemHandle = osSemaphoreCreate(osSemaphore(myBinarySem), 1);
myBinarySemHandle = xSemaphoreCreateBinary();
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of taskGive */
osThreadDef(taskGive, StartTaskGive, osPriorityNormal, 0, 128);
taskGiveHandle = osThreadCreate(osThread(taskGive), NULL);
/* definition and creation of taskTake */
osThreadDef(taskTake, StartTaskTake, osPriorityNormal, 0, 128);
taskTakeHandle = osThreadCreate(osThread(taskTake), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartTaskGive */
/**
* @brief Function implementing the taskGive thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTaskGive */
void StartTaskGive(void const * argument)
{
/* USER CODE BEGIN StartTaskGive */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
if (xSemaphoreGive(myBinarySemHandle) == pdTRUE)
printf("二值信号量放入成功\r\n");
else
printf("二值信号量放入失败\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskGive */
}
/* USER CODE BEGIN Header_StartTaskTake */
/**
* @brief Function implementing the taskTake thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTaskTake */
void StartTaskTake(void const * argument)
{
/* USER CODE BEGIN StartTaskTake */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
if (xSemaphoreTake(myBinarySemHandle, portMAX_DELAY ) == pdTRUE)
printf("二值信号量取出成功\r\n");
else
printf("二值信号量取出失败\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskTake */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */
计数型信号量
什么是计数型信号量?
计数型信号量相当于队列长度大于 1 的队列,因此计数型信号量能够容纳多个资源,这在计数型
信号量被创建的时候确定的。
计数型信号量相关 API 函数
|
函数
|
描述 |
|
xSemaphoreCreateCounting()
|
使用动态方法创建计数型信号量。
|
|
xSemaphoreCreateCountingStatic()
|
使用静态方法创建计数型信号量
|
|
uxSemaphoreGetCount()
|
获取信号量的计数值
|
计数型信号量的释放和获取与二值信号量完全相同 !
SemaphoreHandle_t xSemaphoreCreateCounting ( UBaseType_t uxMaxCount ,UBaseType_t uxInitialCount );
参数:
uxMaxCount :可以达到的最大计数值 uxInitialCount :创建信号量时分配给信号量的计数值
返回值:
成功,返回对应计数型信号量的句柄;
失败,返回 NULL 。
实操
实验需求
创建一个计数型信号量,按下 KEY1 则释放信号量,按下 KEY2 获取信号量。
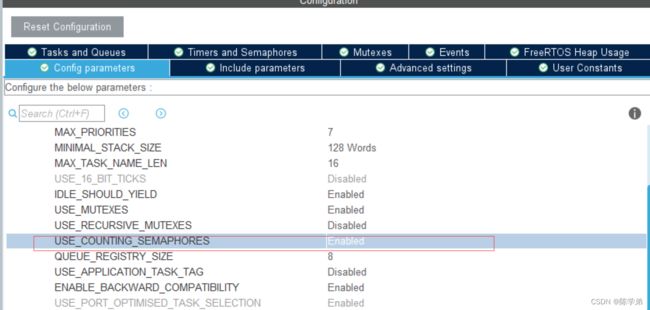
cubeMX配置
将 Config parameters 标签里的 USE_COUNTING_SEMAPHORES 设置为 Enabled 。

代码实现
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* Create the semaphores(s) */
/* definition and creation of myCountingSem */
osSemaphoreDef(myCountingSem);
// myCountingSemHandle = osSemaphoreCreate(osSemaphore(myCountingSem), 3);
myCountingSemHandle = xSemaphoreCreateCounting(3, 0);
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of taskGive */
osThreadDef(taskGive, StartTaskGive, osPriorityNormal, 0, 128);
taskGiveHandle = osThreadCreate(osThread(taskGive), NULL);
/* definition and creation of taskTake */
osThreadDef(taskTake, StartTaskTake, osPriorityNormal, 0, 128);
taskTakeHandle = osThreadCreate(osThread(taskTake), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartTaskGive */
/**
* @brief Function implementing the taskGive thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTaskGive */
void StartTaskGive(void const * argument)
{
/* USER CODE BEGIN StartTaskGive */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
if (xSemaphoreGive(myCountingSemHandle) == pdTRUE)
printf("计数信号量放入成功\r\n");
else
printf("计数信号量放入失败\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);
/* USER CODE END StartTaskGive */
}
}
/* USER CODE BEGIN Header_StartTaskTake */
/**
* @brief Function implementing the taskTake thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTaskTake */
void StartTaskTake(void const * argument)
{
/* USER CODE BEGIN StartTaskTake */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
osDelay(20);
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
if (xSemaphoreTake(myCountingSemHandle, 0 ) == pdTRUE)
printf("计数信号量获取成功\r\n");
else
printf("计数信号量获取失败\r\n");
}
while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);
}
osDelay(10);
}
/* USER CODE END StartTaskTake */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */