音视频基础及海思sample_venc解读
1、sample的整体架构
(1)sample其实是很多个例程,所以有很多个main
(2)每一个例程面向一个典型应用,common是通用性主体函数,我们只分析venc
(3)基本的架构是:venc中的main调用venc中的功能函数,再调用common中的功能函数,再调用mpp中的API,再调用HI3518E内部的硬件单元。
(4)sample的配置和编译,重点注意很多环境变量,目录结构不要乱动。
2、sample代码学习的关键
(1)得理解很多基础概念,譬如图像采集原理、模拟数字、通道、绑定、组、视频缓冲池、在线/离线模式等等
(2)得从宏观上理解整个视频采集、内部传递、处理、编码输出、网络传输等的过程。
(3)得反复看代码,熟才能生巧,才能帮助理解整个代码。
(4)得查阅mpp手册,熟悉海思这一套API的规矩和一般用法。
3、sample_venc的大体分析
(1)从main入手,main的传参分析
(2)几个重要的基本概念:
H.264 H.265 MJPEG 视频编码规范标准
1080P、720P、VGA、D1 视频分辨率(清晰度)
fps(frame per second) 帧率:每秒多少帧
4、图像像素格式深度理解
4.1、颜色的学问
(1)颜色是主观还是客观存在?是主观存在的,颜色的本质是光的波长,这些不同波长的光映射到人的眼中就成了不同的颜色,正因为有人去看才有了颜色这个概念
(2)颜色的三个关键:亮度、色度、饱和度
(3)人的眼睛并非理想完美的颜色识别器件,图像表达也有清晰度和质量高低的差异
(4)科学研究如何定义(或者表达、记录、计算)一种颜色?色彩空间的概念
色彩空间:如何用数字表达一种颜色,例如rgb888,rgb565等
4.2、rawRGB和图像采集过程
(1)图像采集的过程:光照在成像物体被反射->镜头汇聚->Sensor光电转换->ADC为rawRGB
光照到成像物体上被反射到镜头汇聚起来传到焦点,Sensor就在焦点处,Sensor是一个平面,被分成很多区域,每一个最小区域就是一个像素,这一路像素就是一路单独的光电转换器,转出来的电信号是一个模拟值,光照到每个像素上就生成了这个像素的模拟电压。
Sensor有个参数叫做分辨率,或者说叫做像素个数,比如买手机时经常说多少w像素,指的就是这里的意思。
这些模拟电信号再由ADC转换成数字的电信号(rawRGB)
(2)sensor上每个像素只采集一种颜色的光,因此sensor每个像素只能为R或G或B
也就是说手机摄像头上一个像素点是rgb的一个颜色。
而手机的LCD显示屏,一个像素点里面有三个小灯,rgb。
也就是说光电转换只能转换一种颜色分量,不可能一个点转换R、G、B三种分量。
(3)rawRGB和RGB都是用来描述图像的,图像采集时RGB是由rawRGB计算而来的
由rawRGB进行联合附近的分量进行加权平均计算得到RGB
(4)因为图像颜色本身有一定连贯性,而且人眼是非理想的,因此图像采集和再显示给人这整个构成中有三个要素:sensor分辨率、pitch(两个像素点中心的距离)、观看距离
(5)如果是视频,质量好坏还要加上帧率framerate
(6)图像的表达、压缩、修整等相关技术,就发生在rawRGB进来以后的各个环节
表达:rgb565、rgb888、1080p等
压缩:bmp、jpg、png等
修整:锐化、曝光等
5、RGB和YUV详解
5.1、RGB方式表示颜色
(1)RGB有RGB565和RGB888,ARGB等多种子分类
(2)RGB的本质:将色度分解为R、G、B三部分,然后记录下亮度数据,也就是说RGB没有记录颜色的色度,色度是固定的红绿蓝。
(3)RGB的优势:方便数字化表达,广泛用于数字化彩色显示器,计算机编程等领域。
(4)RGB的劣势:和传统的灰度图兼容不好,表达颜色的效率不高
灰度图只有亮度,没有颜色,而RGB又默认分解成三种基色,所以会兼容不好
5.2、YUV
(1)YUV是一种色彩空间,Y表示亮度,U和V表示色度。只有Y就是黑白图像,也就是灰度图,再加上UV就是彩色图像了。YUV的一个好处就是让彩色系统和传统黑白系统很好的兼容。
(2)YUV和RGB的相同点是:都是用来表达颜色的数学方法;不同点是:对颜色的描述思路和方法不同。RGB将一个颜色拆解为3个纯色的亮度组合,YUV将一个颜色分解为一个亮度和2个色度的组合。
(3)RGB和YUV之间可以用数学方法互相换算,是个典型的浮点运算过程。
(4)YUV和YCbCr几乎可以看做一个概念,详细的区分以后再去慢慢体会。
(5)YUV格式分为packed和planar两种。具体参考:http://blog.csdn.net/sunnylgz/article/details/7580628
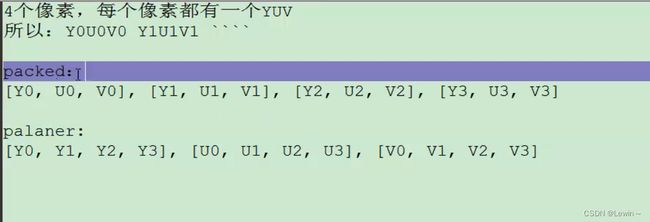
(6)有多种YUV相关的概念需要弄清楚(以下均为planar格式)
YUV
YUV422(YUYV)
YUV420(YUV411)
YUV422 planar(YUV422P)
[Y1,Y2,Y3,Y4,Y5,Y6,Y7,Y8],[U1,U2,U3,U4],[V1,V2,V3,V4]
YUV420 Planar(YUV420P)
[Y1,Y2,Y3,Y4,Y5,Y6,Y7,Y8],[U1,U2],[V1,V2]
YUV422 semi planar(YUV422SP)
[Y1,Y2,Y3,Y4,Y5,Y6,Y7,Y8],[U1,V1],[U2,V2],[U3,V3],[U4,V4]
YUV420 semi Planar(YUV420SP)
[Y1,Y2,Y3,Y4,Y5,Y6,Y7,Y8],[U1,V1],[U2,V2]
参考:http://blog.csdn.net/bingqingsuimeng/article/details/50716390
和https://www.2cto.com/kf/201303/198023.html
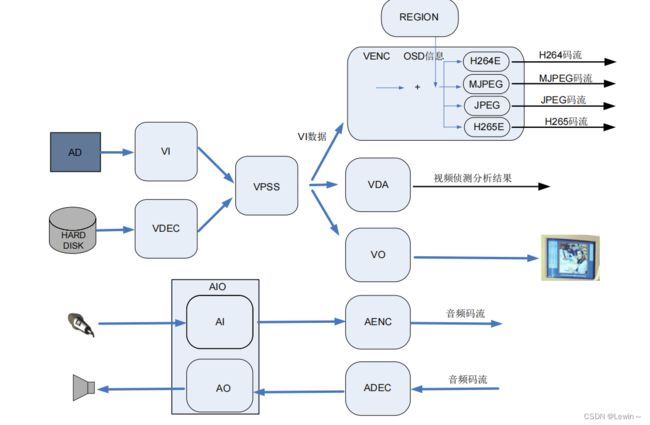
6、海思MPP功能模块和视频缓存池
6.1、MPP功能模块框图
(1)找到MPP手册
麦克风声电转换AD转换采样-》AI音频输入并降噪-》AENC编码-》音频码流
音频码流-》ADEC解码-》AO音频输出-》喇叭放大
镜头-》Sensor光电转换得到模拟电信号-》AD转换得到rawRGB-》VI视频输入-》VPSS接收并输出多路分辨率不同的图像-》VENC编码成H.264码流
(2)详见系统概述1.3部分
6.2、sample中SAMPLE_VENC_1080P_CLASSIC函数开始看
(1)PAYLOAD_TYPE_E
(2)PIC_SIZE_E
(3)VB_CONF_S
7、视频缓存池
7.1、什么是视频缓冲池
(1)视频的本质是多帧图片,图片的本质是RGB或rawRGB数据,要占用一段连续内存
(2)视频的裁剪、缩放、修正处理(马赛克)等各种操作,本质上就是对内存中的数据进行运算
(3)视频缓存池(VB, video buffer)就是一段很大,又被合理划分和管理的内存,用来做视频数据的暂存和运算场地
(4)公共视频缓存池的公共2字,可以理解为全局变量,也就是各个模块都能访问的一段内存
(5)看似视频缓存块在各个模块之间流转,实际上并没有内存复制,而是指针在传递
(6)视频缓存池的内存由MPP来维护,我们在系统启动时就把整个SDRAM分成了2部分:系统部分(由linux kernel来维护管理)和mpp部分(由mpp系统来维护管理)
(7)缓存池需要几个,每个中包含几个缓存块,每个缓存块多大,都是可以由用户程序设置好参数,然后调用MPP的相应API来向MPP申请分配的。
7.2、相关的数据结构和API
(1)VB_CONF_S结构体

(2)HI_MPI_VB_SetConf
(3)HI_MPI_VB_Init
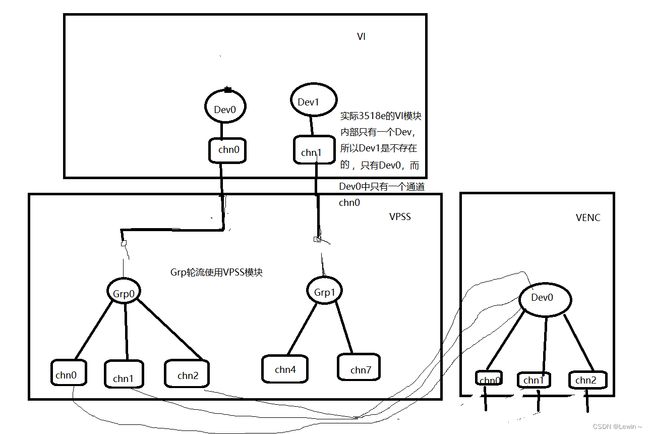
8、VI部分 知识要点
(1)常用Sensor的接口有三种:MIPI、LVDS、DC
(2)WDR宽动态:一副图像里面,局部曝光和其它地方是不一样的
(3)isp就是image signal process,图像信号处理。
(4)HI3518E内部的ISP单元是隶属于VI模块的。VI模块就包含3大部分:第一部分是和Sensor对接的部分(Sensor是什么接口的,mipi,dc等,怎么去操作),第二部分就是ISP,第三部分就是VI dev和channel
dev:就是用来采集图像的一个硬件单元
9、VPSS部分 知识要点
9.1、VPSS的手册部分解读
VI/VPSS 离/在线模式
VI 和 VPSS 的协作模式分为以下 2 种(模式切换由 load 脚本参数控制,对应 sys 模块
参数 vi_vpss_online):
VI/VPSS 离线模式是指 VI 进行时序解析后将图像数据写出到 DDR,VPSS 从
DDR 中载入 VI 采集的数据进行图像处理,是传统 Hi3518/Hi3520D 等芯片的
VI/VPSS 的协作模式。
VI/VPSS 在线模式是指 VI 进行时序解析后直接在芯片内部将数据传递到 VPSS,
中间无 DDR 写出的过程。在线模式可以省一定的带宽和内存,降低端到端的延
时。需要注意的是,在线模式时,因为 VI 不写出数据到 DDR,无法进行
CoverEx、OverlayEx、Rotate、LDC 等操作,需要在 VPSS 各通道写出后再进行
Rotate/LDC 等处理,而且有些功能只在离线下能支持,比如 DIS。
总结:
离线模式:公共视频缓冲池-》VI模块处理缓冲池那一份-》复制到DDR-》VPSS处理DDR中的那一份
在线模式:公共视频缓冲池-》VI模块处理缓冲池那一份-》VI模块将缓冲池的指针传递给VPSS,VPSS处理缓冲池中的那一份
10、VENC部分 知识要点
有了以上,VENC部分代码就很简单
学习博文:
LCD常用接口:
https://blog.csdn.net/wocao1226/article/details/23870149
yuv格式:
http://blog.csdn.net/sunnylgz/article/details/7580628
http://blog.csdn.net/bingqingsuimeng/article/details/50716390
https://www.2cto.com/kf/201303/198023.html
图像编码原理:
http://blog.csdn.net/newchenxf/article/details/51693753
Qp:
http://blog.csdn.net/u013354805/article/details/51988171
VI、VPSS、VENC数据流向图
海思示例代码 函数调用关系
sample_venc.c
main
SAMPLE_VENC_1080P_CLASSIC
SAMPLE_COMM_VI_GetSizeBySensor(step1) //获取Sensor采集图像的大小---》720P
SAMPLE_COMM_SYS_CalcPicVbBlkSize //计算缓冲块大小---》1280 * 768 * 1.5+HeaderSize 1.5是yuv420图像中一个像素的大小
SAMPLE_COMM_SYS_GetPicSize //获取Sensor图像的大小---》1280 * 720
VB_PIC_HEADER_SIZE //计算图像头的大小---》HeaderSize
SAMPLE_COMM_SYS_Init(step2) //MPP系统初始化
HI_MPI_SYS_Exit //去除 MPP 系统。禁用一切模块
HI_MPI_VB_Exit //去除 MPP 视频缓存池
HI_MPI_VB_SetConf //设置 MPP 视频缓存池属性---》最大缓冲池个数为128,实际缓冲池个数为16,每个缓冲块的大小和个数
HI_MPI_VB_Init //初始化 MPP 视频缓存池
HI_MPI_SYS_SetConf //配置系统控制参数---》64字节对齐
HI_MPI_SYS_Init //初始化 MPP 系统
SAMPLE_COMM_VI_StartVi(step3) //启动vi dev & CHN进行捕获
IsSensorInput //传感器输入是 电视或Sensor
SAMPLE_COMM_VI_StartIspAndVi //启动Isp
SAMPLE_COMM_VI_StartMIPI(1) //mipi接口的配置---》3.3V
SAMPLE_COMM_VI_SetMipiAttr //mipi接口的配置
fd = open("/dev/hi_mipi", O_RDWR); //打开mipi的设备文件
ioctl(fd, HI_MIPI_SET_DEV_ATTR, pstcomboDevAttr) //应用层操作Sensor的驱动,对Sensor做一些必要的初始化
SAMPLE_COMM_ISP_Init(2) //配置传感器和ISP(包括WDR宽动态模式)。 目的是启动3518e芯片内部的ISP单元
sensor_register_callback //传感器寄存器回调
HI_MPI_AE_Register //注册AE库,自动曝光
HI_MPI_AWB_Register //注册AWB库,自动白平衡
HI_MPI_AF_Register //注册AF库,自动对焦
HI_MPI_ISP_MemInit //初始化 ISP 外部寄存器
HI_MPI_ISP_SetWDRMode //设置 ISP 宽动态的模式---》不启用
HI_MPI_ISP_SetPubAttr //配置 ISP 属性---》rawRGB的排列顺序---GRBG、帧率为30、图像区域的起始点、图像区域的宽和高
HI_MPI_ISP_Init //初始化ISP系统
SAMPLE_COMM_ISP_Run(3) //运行isp线程
pthread_create(&gs_IspPid, &attr, (void* (*)(void*))Test_ISP_Run, NULL) //创建线程
Test_ISP_Run //线程函数
HI_MPI_ISP_Run //开始运行ISP系统
SAMPLE_COMM_VI_StartDev(4) //配置并打开Dev
HI_MPI_VI_SetDevAttr //配置 Dev的属性---》接口模式为DC,单路工作方式,图像的扫描模式是逐行扫描,转换成yuv420,使用内部ISP,输入数据类型为RGB,不启用数据逆向
HI_MPI_ISP_GetWDRMode //获取 ISP 宽动态模式
HI_MPI_VI_SetWDRAttr //配置 WDR宽动态模式的 工作属性---》都不开启
HI_MPI_VI_EnableDev //启用Dev
SAMPLE_COMM_VI_StartChn(5) //配置并打开通道chn(最多1个)
HI_MPI_VI_SetChnAttr //设置 VI 通道chn属性---》通道支持的图像属性是720P,像素存储格式是yuv420sp,原始图像不镜像不翻转,不进行帧率控制,不压缩
HI_MPI_VI_SetRotate //设置 VI 图像旋转属性--》图像从通道中出来后的旋转角度---不旋转
HI_MPI_VI_EnableChn //启用通道chn
SAMPLE_COMM_SYS_GetPicSize(step4) //获取Sensor图像的大小---》1280 * 720
SAMPLE_COMM_VPSS_StartGroup //启动VPSS的Group
HI_MPI_VPSS_CreateGrp //创建Group
HI_MPI_VPSS_GetNRParam //获取 vpss 3DNR 参数
HI_MPI_VPSS_SetNRParam //设置 vpss 3DNR 参数
HI_MPI_VPSS_StartGrp //启用Group
SAMPLE_COMM_VI_BindVpss //Group绑定VI模块中的Dev0中的chn0
SAMPLE_COMM_VI_Mode2Param //获取VI的参数---》是有1个Dev和chn
HI_MPI_SYS_Bind //VI通道chn0 绑定 vpss组Group0
SAMPLE_COMM_VPSS_EnableChn //在Group内部创建几路自己所用的chn
HI_MPI_VPSS_SetChnAttr //设置 VPSS 通道属性---》不进行帧率控制
HI_MPI_VPSS_SetChnMode //设置 VPSS 通道工作模式---》VPSS通道工作模式为USER模式,目标图像的像素格式是yuv420sp,目标图像的宽度是720,目标图像的高是1280,设置 256byte 段式压缩
HI_MPI_VPSS_EnableChn //打开chn
SAMPLE_COMM_VENC_Start(step5) //启动venc流模式(h264, mjpeg)
SAMPLE_COMM_SYS_GetPicSize //获取Sensor图像的大小---》1280x720
HI_MPI_VENC_CreateChn //创建VENC chn---》编码通道的宽度是720、高度是1280,要编码的图片的宽度是720、高度是1280,流缓冲区的大小是1280x720,编码出的视频流的图像质量是高清还是啥啥,获取流的模式是切片模式,不支持B帧,设置码率控制模式:CBR、FIXQF、VBR,以及码率控制相关的参数;
HI_MPI_VENC_StartRecvPic //开始接收图片
SAMPLE_COMM_VENC_BindVpss //VENC的Dev绑定VPSS的chn
HI_MPI_SYS_Bind //VENC的Dev绑定VPSS的chn
SAMPLE_COMM_VENC_StartGetStream(step6) //获取流,然后将其保存到文件。
SAMPLE_COMM_VENC_GetVencStreamProc //线程函数
HI_MPI_VENC_GetChnAttr //获取编码通道的编码属性。
SAMPLE_COMM_VENC_GetFilePostfix //获取文件名后缀--->.h.264
HI_MPI_VENC_GetFd //mpp内部把VENC编码好的视频流数据做成文件,然后把文件描述符通过这个API获取
HI_MPI_VENC_Query //查询编码通道状态---》判断当前这帧图像的码流包个数是否为0,为0则退出程序
HI_MPI_VENC_GetStream //获取编码码流。
SAMPLE_COMM_VENC_SaveStream //将帧保存到文件
SAMPLE_COMM_VENC_SaveH264
fwrite
HI_MPI_VENC_ReleaseStream //释放码流缓存。
SAMPLE_COMM_VENC_StopGetStream(step7) //退出程序