视觉SLAM十四讲——ch8实践(视觉里程计2)
视觉SLAM十四讲----ch8的实践操作及避坑
- 0.实践前小知识介绍
- 1. 实践操作前的准备工作
- 2. 实践过程
-
- 2.1 LK光流
- 2.2 直接法
- 3. 遇到的问题及解决办法
- 3.1 编译时遇到的问题
0.实践前小知识介绍
里程计的历史渊源是什么?
里程计是一种用来测量车辆或机器人行驶距离的装置,它通常通过检测车辆轮子或机器人轮子的旋转来进行测量。里程计的历史可以追溯到17世纪早期,当时人们开始使用机械装置来测量车辆行驶的距离。这些装置通常使用一个机械计数器,它们可以在车轮旋转的过程中记录里程数。18世纪末期,发明家托马斯·戈德史密斯发明了一种称为“奥多米特”的装置,它使用一个机械计数器来记录马车或自行车行驶的里程。这个装置被认为是现代里程计的早期形式。
随着时间的推移,里程计逐渐发展成为电子化和计算机化的设备。现代车辆和机器人通常使用激光或红外线传感器来测量轮子的旋转,并将数据传输到计算机或控制系统中。总的来说,里程计的历史经历了从机械装置到电子化和计算机化的过程。
1. 实践操作前的准备工作
- 在终端中进入ch8文件夹下,顺序执行以下命令进行编译。
mkdir build
cd build
cmake ..
//注意,j8还是其他主要看自己的电脑情况
make -j8
- 在build文件中进行运行。
注意: 在make之前,尽量将文件中的获取图片的路径都更改以下,否则后期运行有问题还得再更改,再make。
2. 实践过程
2.1 LK光流
代码:
//
// Created by Xiang on 2017/12/19.
//
#include 在build中执行语句:
./optical_flow
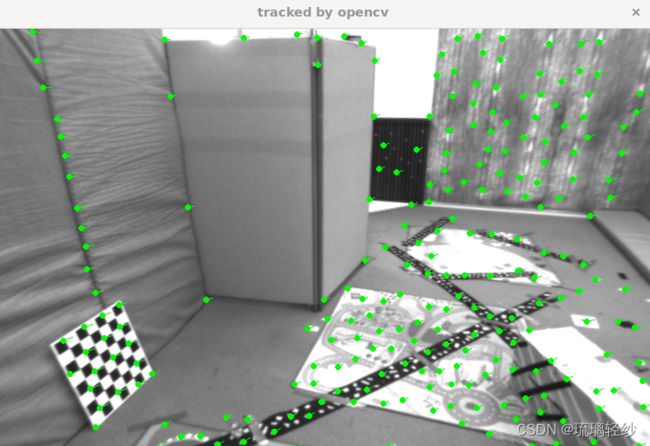
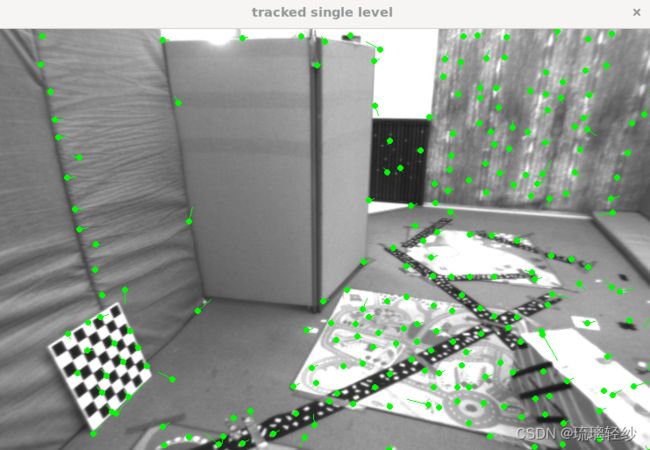
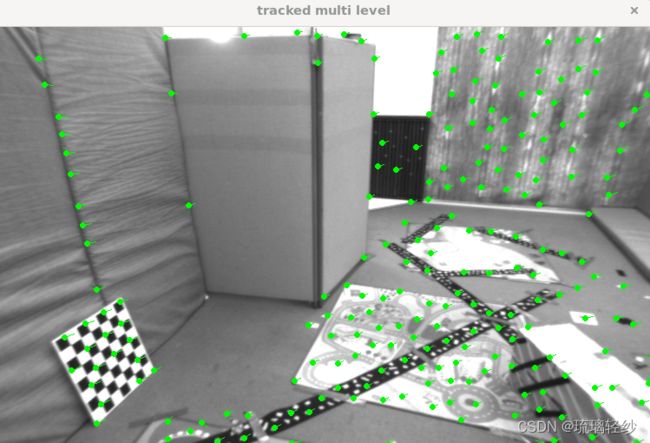
运行结果:
运行后展示使用opencv、单层、多层的追踪
同时终端输出:
build pyramid time: 0.0072683
track pyr 3 cost time: 0.0004321
track pyr 2 cost time: 0.0002794
track pyr 1 cost time: 0.0002624
track pyr 0 cost time: 0.0003014
optical flow by gauss-newton: 0.0087955
optical flow by opencv: 0.0054821
2.2 直接法
代码:
#include 在build中执行语句: ./direct_method
运行结果:
运行结果图可以看出追踪流,需要不停的对窗口关闭,可以看出来其变化。

终端输出相应信息:
iteration: 0, cost: 1.59797e+06
iteration: 1, cost: 651716
iteration: 2, cost: 243255
iteration: 3, cost: 176884
cost increased: 183909, 176884
T21 =
0.999991 0.00245009 0.0033858 0.00303273
-0.00245906 0.999993 0.00264927 0.000424829
-0.00337929 -0.00265757 0.999991 -0.730917
0 0 0 1
direct method for single layer: 0.0016574
iteration: 0, cost: 186361
T21 =
0.999989 0.00302157 0.00347121 0.000762356
-0.00302936 0.999993 0.00224074 0.00666315
-0.00346442 -0.00225123 0.999991 -0.728227
0 0 0 1
direct method for single layer: 0.002358
iteration: 0, cost: 247529
iteration: 1, cost: 229117
T21 =
0.999991 0.00251345 0.00346578 -0.00270253
-0.00252155 0.999994 0.00233534 0.00243076
-0.00345989 -0.00234406 0.999991 -0.734719
0 0 0 1
direct method for single layer: 0.00523089
iteration: 0, cost: 348441
T21 =
0.999991 0.00248082 0.00343389 -0.00373965
-0.00248836 0.999994 0.00219448 0.00304522
-0.00342843 -0.00220301 0.999992 -0.732343
0 0 0 1
direct method for single layer: 0.0012425
iteration: 0, cost: 1.315e+06
iteration: 1, cost: 906037
iteration: 2, cost: 603626
iteration: 3, cost: 399435
iteration: 4, cost: 280889
iteration: 5, cost: 237691
cost increased: 238395, 237691
T21 =
0.999971 0.000902974 0.00759567 0.00772499
-0.000938067 0.999989 0.00461783 0.00179863
-0.00759142 -0.00462482 0.99996 -1.46052
0 0 0 1
direct method for single layer: 0.0045787
iteration: 0, cost: 355480
iteration: 1, cost: 348267
cost increased: 348423, 348267
T21 =
0.999972 0.00120085 0.00742895 0.0085892
-0.00123022 0.999991 0.00395007 0.00531883
-0.00742414 -0.0039591 0.999965 -1.46883
0 0 0 1
direct method for single layer: 0.0009226
iteration: 0, cost: 443225
iteration: 1, cost: 435054
cost increased: 437537, 435054
T21 =
0.999971 0.000737127 0.00764046 -0.000242531
-0.000767091 0.999992 0.00391957 0.00279348
-0.00763751 -0.00392532 0.999963 -1.4818
0 0 0 1
direct method for single layer: 0.0009165
iteration: 0, cost: 501709
iteration: 1, cost: 463084
cost increased: 463953, 463084
T21 =
0.999971 0.000695392 0.00758989 -0.00249798
-0.000723685 0.999993 0.00372567 0.00395279
-0.00758725 -0.00373106 0.999964 -1.48132
0 0 0 1
direct method for single layer: 0.0008786
iteration: 0, cost: 1.37107e+06
iteration: 1, cost: 1.10683e+06
iteration: 2, cost: 921990
iteration: 3, cost: 794740
iteration: 4, cost: 601342
iteration: 5, cost: 559319
iteration: 6, cost: 394434
iteration: 7, cost: 363978
cost increased: 374118, 363978
T21 =
0.999945 0.00160897 0.0103684 0.0493737
-0.00166631 0.999983 0.00552457 0.0132374
-0.0103594 -0.00554155 0.999931 -2.18064
0 0 0 1
direct method for single layer: 0.0020563
iteration: 0, cost: 461649
iteration: 1, cost: 443603
iteration: 2, cost: 436513
iteration: 3, cost: 432080
iteration: 4, cost: 423494
cost increased: 431930, 423494
T21 =
0.999938 0.00146627 0.011054 0.0282033
-0.00152599 0.999984 0.0053958 0.00256267
-0.0110459 -0.00541233 0.999924 -2.21468
0 0 0 1
direct method for single layer: 0.0015141
iteration: 0, cost: 646880
iteration: 1, cost: 614318
iteration: 2, cost: 613113
cost increased: 620133, 613113
T21 =
0.999935 0.00152579 0.0112714 0.0183767
-0.00158773 0.999984 0.00548783 -0.00540064
-0.0112629 -0.00550537 0.999921 -2.23461
0 0 0 1
direct method for single layer: 0.0011636
iteration: 0, cost: 924370
iteration: 1, cost: 828022
iteration: 2, cost: 821445
iteration: 3, cost: 803411
cost increased: 811368, 803411
T21 =
0.999934 0.00125001 0.0114068 0.00255272
-0.00131019 0.999985 0.00527034 -0.000605904
-0.0114001 -0.00528494 0.999921 -2.24055
0 0 0 1
direct method for single layer: 0.0015292
iteration: 0, cost: 1.43709e+06
iteration: 1, cost: 1.31501e+06
iteration: 2, cost: 1.06723e+06
iteration: 3, cost: 938977
iteration: 4, cost: 788005
iteration: 5, cost: 680776
iteration: 6, cost: 605861
iteration: 7, cost: 548408
iteration: 8, cost: 516721
iteration: 9, cost: 513621
T21 =
0.999872 -0.000312873 0.0159856 0.0259369
0.000197362 0.999974 0.00722705 -0.00480823
-0.0159874 -0.00722297 0.999846 -2.96617
0 0 0 1
direct method for single layer: 0.0048151
iteration: 0, cost: 640692
iteration: 1, cost: 616653
iteration: 2, cost: 610486
cost increased: 615297, 610486
T21 =
0.999864 -0.000319108 0.0164719 0.00993795
0.000208632 0.999977 0.00670821 -0.00627072
-0.0164737 -0.00670386 0.999842 -3.005
0 0 0 1
direct method for single layer: 0.0009756
iteration: 0, cost: 848724
iteration: 1, cost: 823518
iteration: 2, cost: 780844
cost increased: 802765, 780844
T21 =
0.999865 -0.000227727 0.0164536 0.0022434
0.000124997 0.99998 0.0062444 -0.00399514
-0.0164547 -0.00624149 0.999845 -3.01734
0 0 0 1
direct method for single layer: 0.0010828
iteration: 0, cost: 1.26838e+06
iteration: 1, cost: 1.16447e+06
cost increased: 1.19957e+06, 1.16447e+06
T21 =
0.999865 0.00017071 0.0164584 -0.00906366
-0.000267333 0.999983 0.00586871 0.000576184
-0.0164571 -0.00587231 0.999847 -3.02444
0 0 0 1
direct method for single layer: 0.0008361
iteration: 0, cost: 1.64476e+06
iteration: 1, cost: 1.49383e+06
iteration: 2, cost: 1.23318e+06
iteration: 3, cost: 950472
iteration: 4, cost: 794112
iteration: 5, cost: 686345
iteration: 6, cost: 671817
iteration: 7, cost: 659908
iteration: 8, cost: 652671
iteration: 9, cost: 605440
T21 =
0.999803 0.00057056 0.0198394 0.0427397
-0.000712283 0.999974 0.00713717 0.0136135
-0.0198348 -0.00714989 0.999778 -3.76444
0 0 0 1
direct method for single layer: 0.0088727
iteration: 0, cost: 983836
iteration: 1, cost: 948750
iteration: 2, cost: 945444
iteration: 3, cost: 895561
cost increased: 898341, 895561
T21 =
0.99978 0.000643056 0.0209471 0.000477452
-0.000787155 0.999976 0.00687165 0.00707341
-0.0209422 -0.00688663 0.999757 -3.83472
0 0 0 1
direct method for single layer: 0.0012023
iteration: 0, cost: 1.27161e+06
iteration: 1, cost: 1.22543e+06
iteration: 2, cost: 1.04807e+06
cost increased: 1.2001e+06, 1.04807e+06
T21 =
0.999777 0.00108579 0.0210816 -0.00872002
-0.00121752 0.99998 0.00623637 0.0124058
-0.0210744 -0.00626065 0.999758 -3.85459
0 0 0 1
direct method for single layer: 0.0010238
iteration: 0, cost: 1.67716e+06
iteration: 1, cost: 1.64927e+06
iteration: 2, cost: 1.63771e+06
cost increased: 1.64371e+06, 1.63771e+06
T21 =
0.999786 0.00136909 0.0206569 -0.00336234
-0.00149442 0.999981 0.0060529 0.00874311
-0.0206482 -0.00608247 0.999768 -3.86001
0 0 0 1
direct method for single layer: 0.001018
3. 遇到的问题及解决办法
3.1 编译时遇到的问题
- 在make时出现的有关opencv的问题:
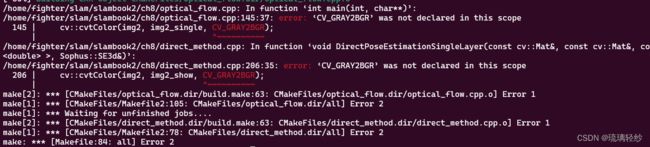
解决办法:按照之前的方法解决即可。查询链接:https://blog.csdn.net/qq_44164791/article/details/131210608?spm=1001.2014.3001.5502