经典目标检测YOLO系列(1)YOLO-V1算法及其在VOC2007数据集上的应用
经典目标检测YOLO系列(1)YOLO-V1算法及其在VOC2007数据集上的应用
1 YOLO-V1的简述
1.1 目标检测概述
目标检测有非常广泛的应用, 例如:在安防监控、手机支付中的人脸检测;在智慧交通,自动驾驶中的车辆检测;在智慧商超,无人结账中的商品检测;在工业领域中的钢材、轨道表面缺陷检测。
目标检测关注的是图片中特定目标物体的位置。一个检测任务包含两个子任务,其一是输出目标的类别信息,属于分类任务;其二是输出目标的具体位置信息,属于定位任务。
早期,传统目标检测算法还没有使用深度学习,一般分为三个阶段:
- 区域选取:采用滑动窗口(Sliding Windows)算法(可以想象一个窗口在图像从左到右,从上到下,框出图像内容),选取图像中可能出现物体的位置,这种算法会存在大量冗余框,并且计算复杂度高。
- 特征提取:通过手工设计的特征提取器(如SIFT和HOG等)进行特征提取。
- 特征分类:使用分类器(如SVM)对上一步提取的特征进行分类。
2014年的R-CNN(Regions with CNN features)使用深度学习实现目标检测,从此拉开了深度学习做目标检测的序幕。并且随着深度学习的方法快速发展,基于深度学习的目标检测,其检测效果好,逐渐成为主流。
基于深度学习的目标检测大致可以分为一阶段(One Stage)模型和二阶段(Two Stage)模型。
-
目标检测的一阶段模型是指没有独立地提取候选区域(Region Proposal),直接输入图像得到图中存在的物体类别和相应的位置信息。典型的一阶段模型有SSD(Single Shot multibox-Detector)、YOLO(You Only Look Once)系列模型等。
-
二阶段模型是有独立地候选区域选取,要先对输入图像筛选出可能存在物体的候选区域,然后判断候选区域中是否存在目标,如果存在输出目标类别和位置信息。经典的二阶段模型有R-CNN、Fast R-CNN、Faster R-CNN。
-
如下图,两阶段的检测算法精度会比一阶段检测算法高,而检测速度确不如一阶段的检测算法,二阶段检测算法适合对精度要求高的业务,一阶段检测算法适合对实时性要求高的业务。

1.2 YOLO-V1概述
YOLO(You Only Look Once)是一种基于深度神经网络的对象识别和定位算法,其最大的特点是运行速度很快,可以用于实时系统。
论文下载地址: https://arxiv.org/pdf/1506.02640.pdf
1.2.1 YOLO-V1的网络结构及pytorch代码实现
第一个版本的YOLO的特征提取网络有24个卷积层和2个全连接层。网络结构如下图。
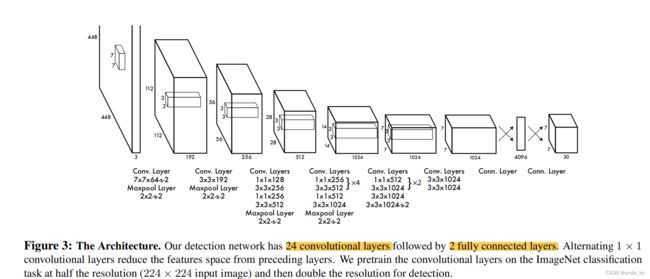
- 可以看出,这个网络中主要采用了1x1卷积后跟着3x3卷积的方式。
- 特征提取网络采用了前20个卷积层,加一个avg-pooling层和一个全连接层,对ImageNet2012进行分类,top-5正确率为88%,输入分辨率为224x224。
- 检测时,将输入分辨率改为448x448,因为网络结构是全卷积的,所以输入分辨率可以改变,整个网络输出为7x7x30维的tensor。
- YOLO网络借鉴了GoogLeNet分类网络结构,有24个卷积层+2个全连接层。
图片参数中的s-2指的是步长为2,这里要注意以下三点:- 在ImageNet中预训练网络时,使用的输入是224 * 224,用于检测任务时,输入大小改为448 * 448,这是通过调整第一个卷积层的步长来实现的;
- 网络使用了很多1*1的卷积层来进行特征降维;
- 最后一个卷积层的输出为(7, 7, 1024),经过flatten后紧跟两个全连接层,形成一个线性回归,最后一个全连接层又被reshape成(7, 7, 30),形成对2个box坐标及20个物体类别的预测(PASCAL VOC)。
pytorch代码实现
"""
Yolo (v1)网络的实现:做了轻微修改,加了BatchNorm
"""
import torch
import torch.nn as nn
architecture_config = [
(7, 64, 2, 3), # 四个参数分别对应 (kernel_size, filters, stride, padding)
"M", # M代表最大池化kernel=2x2, stride=2
(3, 192, 1, 1),
"M",
(1, 128, 1, 0),
(3, 256, 1, 1),
(1, 256, 1, 0),
(3, 512, 1, 1),
"M",
[(1, 256, 1, 0), (3, 512, 1, 1), 4], # CNNBlock重复4次,先用1x1卷积,后接3x3卷积
(1, 512, 1, 0),
(3, 1024, 1, 1),
"M",
[(1, 512, 1, 0), (3, 1024, 1, 1), 2], # CNNBlock重复2次,先用1x1卷积,后接3x3卷积
(3, 1024, 1, 1),
(3, 1024, 2, 1),
(3, 1024, 1, 1),
(3, 1024, 1, 1),
]
class CNNBlock(nn.Module):
"""CNN块的实现(卷积-BN-ReLU)"""
def __init__(self, in_channels, out_channels, **kwargs):
super(CNNBlock, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, bias=False, **kwargs)
# 这里做了稍微修改,在卷积后加了BatchNorm
self.batchnorm = nn.BatchNorm2d(out_channels)
self.leakyrelu = nn.LeakyReLU(0.1)
def forward(self, x):
return self.leakyrelu(self.batchnorm(self.conv(x)))
class Yolov1(nn.Module):
"""Yolov1网络结构实现"""
def __init__(self, in_channels=3, **kwargs):
super(Yolov1, self).__init__()
self.architecture = architecture_config
self.in_channels = in_channels
self.darknet = self._create_conv_layers(self.architecture)
self.fcs = self._create_fcs(**kwargs)
def forward(self, x):
x = self.darknet(x)
return self.fcs(torch.flatten(x, start_dim=1))
def _create_conv_layers(self, architecture):
layers = []
in_channels = self.in_channels
for x in architecture:
# 类型为tuple,即(kernel_size, filters, stride, padding)
if type(x) == tuple:
layers += [
CNNBlock(
in_channels, x[1], kernel_size=x[0], stride=x[2], padding=x[3],
)
]
in_channels = x[1]
# 最大池化层
elif type(x) == str:
layers += [nn.MaxPool2d(kernel_size=(2, 2), stride=(2, 2))]
# 类型为list,重复的CNNBlock
elif type(x) == list:
conv1 = x[0]
conv2 = x[1]
num_repeats = x[2]
for _ in range(num_repeats):
layers += [
CNNBlock(
in_channels,
conv1[1],
kernel_size=conv1[0],
stride=conv1[2],
padding=conv1[3],
)
]
layers += [
CNNBlock(
conv1[1],
conv2[1],
kernel_size=conv2[0],
stride=conv2[2],
padding=conv2[3],
)
]
in_channels = conv2[1]
return nn.Sequential(*layers)
def _create_fcs(self, split_size, num_boxes, num_classes):
S, B, C = split_size, num_boxes, num_classes
# 原始论文中是
# nn.Linear(1024*S*S, 4096),
# nn.LeakyReLU(0.1),
# nn.Linear(4096, S*S*(B*5+C))
return nn.Sequential(
nn.Flatten(),
nn.Linear(1024 * S * S, 496),
nn.Dropout(0.0),
nn.LeakyReLU(0.1),
# 网络输出的特征图会划分为S * S的网格,每个网格会预测B个Bounding Boxes(简称bbox);
# x,y是物体中心点坐标, h,w是bbox的长宽;以及每个bbox对应一个置信度confidence,因此需要乘以5
# C为数据集的类别
# 原始论文中S=7,类别C=20,B=2,因此最终为7x7x(20 + 2x5) = 7x7x30
nn.Linear(496, S * S * (C + B * 5)),
)
if __name__ == '__main__':
S = 7
B = 2
C = 20
model = Yolov1(split_size=S, num_boxes=B, num_classes=C)
x = torch.randn((2, 3, 448, 448))
print(model(x).shape)
LeakyReLU:

1.2.2 网络结构的输出
在YOLO算法中把物体检测(object detection)问题处理成回归问题,用一个卷积神经网络结构就可以从输入图像直接预测bounding box和类别概率。

算法首先把网络输出的特征图(也可说是输入图像,因为输入图像的网格区域与特征图的网格区域有对应关系)划分成S×S的栅格,然后对每个栅格(grid cell)都预测B个bounding boxes,每个bounding box都包含5个预测值:x,y,w,h和confidence。
-
x,y就是bounding box的中心坐标,与grid cell对齐(即相对于当前grid cell的偏移值),使得范围变成0到1; -
w,h进行归一化(分别除以图像的w和h,这样最后的w和h就在0到1范围)。 -
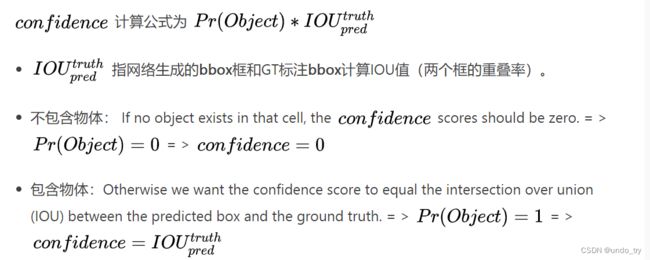
confidence代表了所预测的box中含有object(物体)的置信度和预测的这个框的准度(即这个框定位位置的准确程度)两重信息:
除了确定是否包含物体,还需确定每一个栅格(grid cell)预测的物体类别?对于有C个类别的数据集,会对每个类别预测出类别概率。

因此,网络输出的张量尺寸为 S×S×(5×B + C)。这里5指的是检测框的位置信息和包含物体的概率(x,y,w,h,confidence)。
YOLO V1中S = 7,B = 2,C = 20。因此YOLOV1 网络输出的张量尺寸为7×7×30。张量结构如下图:X1, Y1, W1, H1表示每一个栅格(grid cell)预测的第1个bbox,C1是置信度;X2, Y2, W2, H2表示每一个栅格(grid cell)预测的第2个bbox,C2是置信度;cl1,cl2,...,cl20表示这个物体属于每个类别的概率。
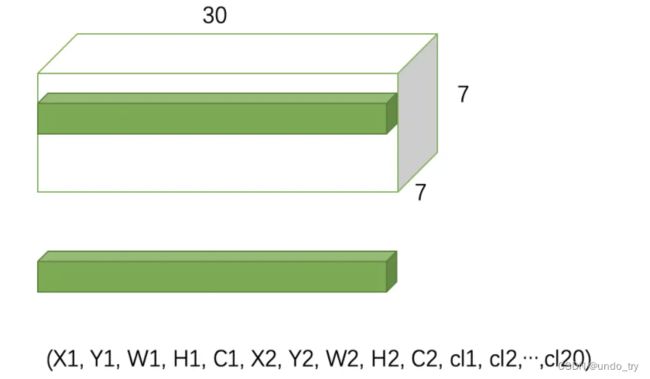
we use S = 7,B = 2. PASCAL VOC has 20 labelled classes so C = 20.Our final prediction is a 7 × 7 × 30 tensor.
# 可以看到在原始论文中,作者用S = 7,B = 2,C = 20,因此最终的网络输出为7x7x(20 + 2x5) = 7x7x30
注意:一个物体的中心,落在一个栅格(grid cell)中,那么这个栅格就负责预测这个物体,即一个栅格只属于一个物体类别。因此,当另一个物体的中心(比如一只小鸟)也落在这个栅格中,那么此物体不会被检测到。
每个bbox包含物体的概率confidence如何计算?
1.2.3 损失函数公式的理解及实现
一个网络如何学习预测物体类别和物体位置,这就要看损失函数了。
损失函数包含三个部分:(1)中心点、宽、高(即位置);(2)置信度;(3)物体的类别标签

1、中心点、宽、高的损失计算,关于物体边框的回归


| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 |

2、置信度的损失计算,关于置信度的回归


3、类别标签的损失计算,关于类别的预测

每个cell最终只预测一个物体边框,依据预测出B个bbox与标注框计算IOU,选取最大的IOU的物体边框。
loss函数的代码实现
"""
Implementation of Yolo Loss Function from the original yolo paper
"""
import torch
import torch.nn as nn
from utils import intersection_over_union
class YoloLoss(nn.Module):
"""
计算yolo_v1模型的loss
"""
def __init__(self, S=7, B=2, C=20):
super(YoloLoss, self).__init__()
self.mse = nn.MSELoss(reduction="sum")
"""
S为输入图像(特征图)的切割大小(in paper 7),
B为boxes的数量(in paper 2),
C为类别数量(in paper and VOC dataset is 20),
target : class labels(20) c x y w h
"""
self.S = S
self.B = B
self.C = C
# These are from Yolo paper, signifying how much we should
# pay loss for no object (noobj) and the box coordinates (coord)
self.lambda_noobj = 0.5
self.lambda_coord = 5
def forward(self, predictions, target):
# predictions are shaped (BATCH_SIZE, S*S(C+B*5) when inputted
predictions = predictions.reshape(-1, self.S, self.S, self.C + self.B * 5)
# Calculate IoU for the two predicted bounding boxes with target bbox(only one)
iou_b1 = intersection_over_union(predictions[..., 21:25], target[..., 21:25]) # first box
print('predictions[..., 21:25]:', predictions[..., 21:25])
iou_b2 = intersection_over_union(predictions[..., 26:30], target[..., 21:25]) # second box
print('predictions[..., 26:30]:', predictions[..., 26:30])
ious = torch.cat([iou_b1.unsqueeze(0), iou_b2.unsqueeze(0)], dim=0)
# Take the box with highest IoU out of the two prediction
# Note that bestbox will be indices of 0, 1 for which bbox was best
iou_maxes, bestbox = torch.max(ious, dim=0)
exists_box = target[..., 20].unsqueeze(3) # in paper this is Iobj_i
# ======================== #
# FOR BOX COORDINATES #
# ======================== #
# Set boxes with no object in them to 0. We only take out one of the two
# predictions, which is the one with highest Iou calculated previously.
box_predictions = exists_box * (
(
bestbox * predictions[..., 26:30]
+ (1 - bestbox) * predictions[..., 21:25]
)
)
# bestbox: 第0个,返回 box_predictions = exists_box * predictions[..., 21:25]
# bestbox: 第1个,返回 box_predictions = exists_box * predictions[..., 26:30]
box_targets = exists_box * target[..., 21:25]
# Take sqrt of width, height of boxes to ensure that
'''
torch.sign(input, out=None)
说明:符号函数,返回一个新张量,包含输入input张量每个元素的正负
(大于0的元素对应1,小于0的元素对应-1,0还是0)
'''
# torch.sign(box_predictions[..., 2:4]) 为其sqrt(w)添加正负号
box_predictions[..., 2:4] = torch.sign(box_predictions[..., 2:4]) * torch.sqrt(
torch.abs(box_predictions[..., 2:4] + 1e-6)
) # w h
box_targets[..., 2:4] = torch.sqrt(box_targets[..., 2:4]) # (N, S, S, 25)
box_loss = self.mse(
torch.flatten(box_predictions, end_dim=-2),
torch.flatten(box_targets, end_dim=-2),
) # (N, S, S, 4) -> (N*S*S, 4)
# ==================== #
# FOR OBJECT LOSS #
# ==================== #
# pred_box is the confidence score for the bbox with highest IoU
pred_box = (
bestbox * predictions[..., 25:26] + (1 - bestbox) * predictions[..., 20:21]
)
# (N*S*S)
object_loss = self.mse(
torch.flatten(exists_box * pred_box),
torch.flatten(exists_box * target[..., 20:21]),
)
# ======================= #
# FOR NO OBJECT LOSS #
# ======================= #
#max_no_obj = torch.max(predictions[..., 20:21], predictions[..., 25:26])
#no_object_loss = self.mse(
# torch.flatten((1 - exists_box) * max_no_obj, start_dim=1),
# torch.flatten((1 - exists_box) * target[..., 20:21], start_dim=1),
#)
# (N,S,S,1) --> (N, S*S)
no_object_loss = self.mse(
torch.flatten((1 - exists_box) * predictions[..., 20:21], start_dim=1),
torch.flatten((1 - exists_box) * target[..., 20:21], start_dim=1),
)
no_object_loss += self.mse(
torch.flatten((1 - exists_box) * predictions[..., 25:26], start_dim=1),
torch.flatten((1 - exists_box) * target[..., 20:21], start_dim=1)
)
# ================== #
# FOR CLASS LOSS #
# ================== #
# (N,S,S,20) -> (N*S*S, 20)
class_loss = self.mse(
torch.flatten(exists_box * predictions[..., :20], end_dim=-2,),
torch.flatten(exists_box * target[..., :20], end_dim=-2,),
)
loss = (
self.lambda_coord * box_loss # first two rows in paper
+ object_loss # third row in paper
+ self.lambda_noobj * no_object_loss # forth row
+ class_loss # fifth row
)
return loss
1.2.4 YOLO-V1优缺点
优点: 速度快,简单
缺点:
- 每个栅格(grid cell)只预测一个类别,对拥挤的物体检测不太友好
- 对小物体检测不好,长宽比单一
- 没有Batch Normalize
2 YOLO-V1在VOC2007数据集上的应用
2.1 数据集的下载及介绍
2.1.1 数据集的下载
PASCAL VOC2007数据集(全部)
链接:https://pan.baidu.com/s/1tnTpr6xFY6mK8q2jfhZBZQ
提取码:z8sd
PASCAL VOC2007数据集(只包含训练集和验证集,不包含测试集)
链接:https://pan.baidu.com/s/1-0U9w_XBGzYpzP4ND25blQ
提取码:zmz6
PASCAL VOC2012数据集(只包含训练集和验证集,不包含测试集)
链接:https://pan.baidu.com/s/1cJPer12vhuubqDeLcRQoPQ
提取码:1340
2.1.2 PASCAL VOC2007数据集的介绍
VOC2007数据集有20个类:aeroplane, bicycle, bird, boat, bottle, bus, car, cat, chair, cow, diningtable, dog, horse, motorbike, person, pottedplant, sheep, sofa, train, tv/monitor。
第一个网盘连接中,有三个压缩包。将VOCdevkit_08-Jun-2007.tar、测试集VOCtest_06-Nov-2007.tar、训练集/验证集VOCtrainval_06-Nov-2007.tar分别下载到本地。

分别解压这个三个压缩包到当前文件夹【注意:解压选项为当前文件夹】。解压后,如图所示。
其中,VOCdevkit_08-Jun-2007.tar中的文件是 development kit code and documentation ,即一些开发工具包代码和文档,如下图所示。有一些MATLAB代码,就是用这些代码处理的这个数据集,还有一个devkit_doc.pdf, 是一个比较详细的说明书。

解压后的文件夹VOC2007中有以下五个部分,如下图所示。

Annotations
这个文件夹里都是.xml文件,文件名是图像名称,如下图所示。每个文件里面保存的是每张图像的标注信息,训练时要用的label信息其实就来源于此文件夹。

例如000007.xml文件如下所示:
<annotation>
<folder>VOC2007folder>
<filename>000007.jpgfilename>
<source>
<database>The VOC2007 Databasedatabase>
<annotation>PASCAL VOC2007annotation>
<image>flickrimage>
<flickrid>194179466flickrid>
source>
<owner>
<flickrid>monsieurrompuflickrid>
<name>Thom Zemanekname>
owner>
<size>
<width>500width>
<height>333height>
<depth>3depth>
size>
<segmented>0segmented>
<object>
<name>carname>
<pose>Unspecifiedpose>
<truncated>1truncated>
<difficult>0difficult>
<bndbox>
<xmin>141xmin>
<ymin>50ymin>
<xmax>500xmax>
<ymax>330ymax>
bndbox>
object>
annotation>
ImageSets
这个文件夹里面是图像划分的集合 ,打开之后有3个文件夹:Layout 、 Main、 Segmentation,如下图所示,这3个文件夹对应的是 VOC challenge 3类不同的任务。

VOC challenge的Main task,其实是classification和detection,所以在Main文件夹中,包含的就是这两个任务要用到的图像集合,如下图所示。
共有84个.txt文件
-
其中4个文件为训练集
train.txt、验证集val.txt、训练集和验证集汇总trainval.txt、测试集test.txt,这4个文件里面保存的是图像的ID号; -
还有20类目标,每个类别有该类的
类别名_train.txt、类别名_val.txt、类别名_trainval.txt、类别名_test.txt这4个文本,共80个文件。这80个文件中每一行的图像ID后面还跟了一个数字,要么是-1, 要么是1,有时候也可能会出现0,意义为:-1表示当前图像中,没有该类物体;1表示当前图像中有该类物体;0表示当前图像中,该类物体只露出了一部分。

还有两个taster tasks :Layout和Segmentation,这两个任务也有各自需要用到的图像,就分别存于Layout和Segmentation两个文件夹中,如下图所示,分别有4个文件:训练集train.txt、验证集val.txt、训练集和验证集汇总trainval.txt、测试集test.txt。

JPEGImages
这个文件夹里面保存的是数据的原始图片,打开之后全是.jpg图片,如下图所示,共有9963张图像。

SegmentationClass
这个文件夹里面保存的是专门针对Segmentation任务做的图像,里面存放的是Segmentation任务的label信息。
SegmentationObject
这个任务叫做Instance Segmentation(样例分割),就同一图像中的同一类别的不同个体要分别标出来,也是单独给的label信息,因为每个像素点要有一个label信息。

2.2 数据预处理
我们仅仅选取6个数据(类别均为狗),作为代码测试。

2.2.1 划分训练集、验证集以及测试集
数据集划分流程:
- 获取’/VOC2007/Annotations’ 下以’.xml’结尾的文件名。
- 从总的样本中按照数据集比例抽取样本,得到每个数据集的索引。
- 不同数据集的存储地址。
- 遍历样本,根据抽取的样本索引放入不同的数据集中。
- 关闭文件。
'''
dataSplit
将数据划分为训练集、验证集、测试集
'''
import os
import random
xml_path = r'../data/VOCdevkit/VOC2007/Annotations'
base_path = r'../data/VOCdevkit/VOC2007/ImageSets/Main'
# 1 样本名字
tmp = []
img_names = os.listdir(xml_path)
for i in img_names:
if i.endswith('.xml'):
tmp.append(i[:-4])
# 2 数据集划分
trainval_ratio = 0.9 # 训练集和验证集一共占0.9,测试集占0.1
train_ratio = 0.9 # 训练集占(训练集和验证集之和)的0.9
N = len(tmp)
trainval_num = int(trainval_ratio * N)
train_num = int(train_ratio * trainval_num)
trainval_idx = random.sample(range(N), trainval_num)
train_idx = random.sample(trainval_idx, train_num)
# 3 数据集的存储地址
ftrainval = open(os.path.join(base_path, 'yyds_trainval.txt'), 'w')
ftrain = open(os.path.join(base_path, 'yyds_train.txt'), 'w')
fval = open(os.path.join(base_path, 'yyds_val.txt'), 'w')
ftest = open(os.path.join(base_path, 'yyds_test.txt'), 'w')
# 4 写入数据
for i in range(N):
name = tmp[i] + '\n'
if i in trainval_idx:
ftrainval.write(name)
if i in train_idx:
ftrain.write(name)
else:
fval.write(name)
else:
ftest.write(name)
# 5 关闭文件
ftrainval.close()
ftrain.close()
fval.close()
ftest.close()
运行代码,生成4个文件,文件内容是.xml文件的文件名
2.2.2 把图片信息和xml信息放在一起
把图片信息和xml信息放在一起。
- 遍历每个数据集获取数据集图片名。生成解析文件,用来存储图片地址和框的信息。
- 遍历每张图片,解析文件写入图片地址,打开xml文件,读入类别信息和框的信息。
- 关闭解析文件
# python中专门的库用于提取xml文件信息名为"ElementTree"
import xml.etree.ElementTree as ET
sets = [('2007','train'),('2007','val'),('2007','test')]
# 20种类别
classes = ["aeroplane", "bicycle", "bird", "boat", "bottle",
"bus", "car", "cat", "chair", "cow", "diningtable",
"dog", "horse", "motorbike", "person", "pottedplant",
"sheep", "sofa", "train", "tvmonitor"] # len(classes) = 20
def convert_annotation(year,img_id,list_file):
list_file.write("../data/VOCdevkit/VOC%s/JPEGImages/%s.jpg"%(year,img_id))
in_file = open('../data/VOCdevkit/VOC%s/Annotations/%s.xml'%(year,img_id))
root = ET.parse(in_file).getroot()
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult)==1:
continue
cls_id = classes.index(cls)
xml_box = obj.find('bndbox')
b = (int(xml_box.find('xmin').text),
int(xml_box.find('ymin').text),
int(xml_box.find('xmax').text),
int(xml_box.find('ymax').text))
list_file.write(" "+','.join([str(i) for i in b])+','+str(cls_id))
for year ,img_set in sets:
img_ids = open('../data/VOCdevkit/VOC%s/ImageSets/Main/yyds_%s.txt'%(year ,img_set)).read().strip().split()
list_file = open('%s_%s.txt'%(year,img_set),'w')
for img_id in img_ids:
convert_annotation(year,img_id,list_file)
list_file.write('\n')
list_file.close()
运行后,生成3个文件

2.2.3 数据增强处理
此文件主要任务就是根据txt文件内的信息制作ground truth,并且还会进行一定的数据增强。最终输出一个7×7×30的张量。
注意:进行数据增强比如对图片进行拉长或者旋转其bbox信息也会随之改变,但是用pytorch自带的数据增强方法并不会改变bbox信息,所以这里都是自己定义的增强方法,在对图片进行变换的过程后也会输出bbox更改后的信息。
对图片数据增强,增加样本,提高模型的泛化能力。
- 首先把图片名称、框、类别信息分别存储。
- 生成迭代器,对每个图片进行数据增强。翻转、缩放、模糊、随机变换亮度、随机变换色度、随机变换饱和度、随机平移、随机剪切。
- 编码。对于增强后的图片,根据图片宽高,获取框在图片的相对位置、去均值、统一图片尺寸、编码。编码的关键在于找到真实框在特征图上的相对位置。先把真实框左上角和右下角坐标转换为中心点和宽高,中心点坐标x特征图宽高后,向下取整在-1就得到真实框在特征图上的位置ij。中心点坐标x特征图宽高-ij得到真实偏移。根据ij输入偏移、宽高、类别信息。
''' 数据增强 '''
import os
import sys
import cv2
import torch
import random
import os.path
import numpy as np
import matplotlib.pyplot as plt
import torch.utils.data as data
import torchvision.transforms as transforms
class yoloDataset(data.Dataset):
image_size = 448
def __init__(self,root,list_file,train,transform):
print('data init')
self.root = root ## img.jpg_path
self.train = train ## bool:True,如果是训练模式,就进行数据增强。
self.transform = transform # 转置
self.fnames = [] # 存储图片名 eg: 00014.jpg
self.boxes = [] # 存放真实框信息
self.labels = [] # 存放标签
self.mean = (123,117,104) # 图片各个通道均值,用于归一化数据,加速训练。
with open(list_file) as f:
lines = f.readlines() # 读取数据
# line: /VOCdevkit/VOC2007/JPEGImages/000022.jpg 68,103,368,283,12 186,44,255,230,14
for line in lines:
splited = line.strip().split()
self.fnames.append(splited[0]) # 保存图片名
num_boxes = (len(splited)-1) # 一张图片中真实框的个数
box = [] # 存储框
label = [] # 存储标签
for i in range(1,num_boxes+1): # 遍历每个框
tmp = [float(j) for j in splited[i].split(',')] # 把真实框油字符变为float类型,并用‘,’隔开。
box.append(tmp[:4])
label.append(int(tmp[4])+1)
self.boxes.append(torch.Tensor(box))
self.labels.append(torch.LongTensor(label))
self.num_samples = len(self.boxes)
def __getitem__(self,idx):
fname = self.fnames[idx] # 用迭代器遍历每张图片
img = cv2.imread(fname) # 读取图片 cv2.imread(os.path.join(self.root+fname))
boxes = self.boxes[idx].clone()
labels = self.labels[idx].clone()
if self.train:
img,boxes = self.random_flip(img,boxes) # 随机翻转
img,boxes = self.randomScale(img,boxes) # 随机伸缩变换
img = self.randomBlur(img) # 随机模糊处理
img = self.RandomBrightness(img) # 随机调整图片亮度
img = self.RandomHue(img) # 随机调整图片色调
img = self.RandomSaturation(img) # 随机调整图片饱和度
img,boxes,labels = self.randomShift(img,boxes,labels) # 随机平移
img,boxes,labels = self.randomCrop(img,boxes,labels) # 随机裁剪
h,w,_ = img.shape
boxes /= torch.Tensor([w,h,w,h]).expand_as(boxes) # 坐标归一化处理,为了方便训练
img = self.BGR2RGB(img)
img = self.subMean(img,self.mean) # 减去均值
img = cv2.resize(img,(self.image_size,self.image_size)) # 将所有图片都resize到指定大小(448,448)
target = self.encoder(boxes,labels) # 将图片标签编码到7x7x30的向量
for t in self.transform:
img = t(img)
return img,target
def __len__(self):
return self.num_samples
def encoder(self,boxes,labels):
"""编码: 输出ground truth (一个7*7*30的张量)"""
grid_num = 7
target = torch.zeros((grid_num,grid_num,30))
wh = boxes[:,2:] - boxes[:,:2]
cxcy = (boxes[:,2:] + boxes[:,:2])/2
for i in range(cxcy.size()[0]):
cxcy_sample = cxcy[i]
ij = (cxcy_sample*grid_num).ceil()-1
dxy = cxcy_sample*grid_num-ij
target[int(ij[1]),int(ij[0]),:2] = target[int(ij[1]),int(ij[0]),5:7] = dxy
target[int(ij[1]),int(ij[0]),2:4] = target[int(ij[1]),int(ij[0]),7:9] = wh[i]
target[int(ij[1]),int(ij[0]),4] = target[int(ij[1]),int(ij[0]),9] = 1
target[int(ij[1]),int(ij[0]),int(labels[i])+9] = 1
return target
def BGR2RGB(self,img):
return cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
def BGR2HSV(self,img):
return cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
def HVS2BGR(self,img):
return cv2.cvtColor(img,cv2.COLOR_HSV2BGR)
def RandomBrightness(self,bgr):
if random.random()<0.5:
hsv = self.BGR2HSV(bgr)
h,s,v = cv2.split(hsv)
v = v.astype(float)
v *= random.choice([0.5,1.5])
v = np.clip(v,0,255).astype(hsv.dtype)
hsv = cv2.merge((h,s,v))
bgr = self.HVS2BGR(hsv)
return bgr
def RandomSaturation(self,bgr):
if random.random()<0.5:
hsv = self.BGR2HSV(bgr)
h,s,v = cv2.split(hsv)
s = s.astype(float)
s *= random.choice([0.5,1.5])
s = np.clip(s,0,255).astype(hsv.dtype)
hsv = cv2.merge((h,s,v))
bgr = self.HVS2BGR(hsv)
return bgr
def RandomHue(self,bgr):
if random.random() < 0.5:
hsv = self.BGR2HSV(bgr)
h,s,v = cv2.split(hsv)
h = h.astype(float)
h *= random.choice([0.5,1.5])
h = np.clip(h,0,255).astype(hsv.dtype)
hsv=cv2.merge((h,s,v))
bgr = self.HVS2BGR(hsv)
return bgr
def randomBlur(self,bgr):
if random.random() < 0.5:
bgr = cv2.blur(bgr,(5,5))
return bgr
def randomShift(self,bgr,boxes,labels):
center = (boxes[:,2:]+boxes[:,:2])/2
if random.random()<0.5:
height,width,c = bgr.shape
after_shift_imge = np.zeros((height,width,c),dtype=bgr.dtype)
after_shift_imge[:,:,:] = (104,117,123)
shift_x = random.uniform(-width*0.2,width*0.2)
shift_y = random.uniform(-height*0.2,height*0.2)
if shift_x>=0 and shift_y>=0:
after_shift_imge[int(shift_y):,int(shift_x):,:] = bgr[:height-int(shift_y),:width-int(shift_x),:]
elif shift_x>=0 and shift_y<0:
after_shift_imge[:height+int(shift_y),int(shift_x):,:] = bgr[-int(shift_y):,:width-int(shift_x),:]
elif shift_x <0 and shift_y >=0:
after_shift_imge[int(shift_y):,:width+int(shift_x),:] = bgr[:height-int(shift_y),-int(shift_x):,:]
elif shift_x<0 and shift_y<0:
after_shift_imge[:height+int(shift_y),:width+int(shift_x),:] = bgr[-int(shift_y):,-int(shift_x):,:]
shift_xy = torch.FloatTensor([[int(shift_x),int(shift_y)]]).expand_as(center)
center = center + shift_xy
mask1 = (center[:,0]>0)& (center[:,0]>height)
mask2 = (center[:,1]>0)& (center[:,1]>width)
mask = (mask1 & mask2).view(-1,1)
boxes_in = boxes[mask.expand_as(boxes)].view(-1,4)
if len(boxes_in) == 0:
return bgr,boxes,labels
box_shift = torch.FloatTensor([[int(shift_x),int(shift_y),int(shift_x),int(shift_y)]]).expand_as(boxes_in)
boxes_in = boxes_in+box_shift
labels_in = labels[mask.view(-1)]
return after_shift_imge,boxes_in,labels_in
return bgr,boxes,labels
def randomScale(self,bgr,boxes):
if random.random() < 0.5:
scale = random.uniform(0.8,1.2)
h,w,c = bgr.shape
bgr = cv2.resize(bgr,(int(w*scale),h))
scale_tensor = torch.FloatTensor([[scale,1,scale,1]]).expand_as(boxes)
boxes = boxes*scale_tensor
return bgr,boxes
return bgr,boxes
def randomCrop(self,bgr,boxes,labels):
if random.random() < 0.5:
center = (boxes[:,:2]+boxes[:,2:])/2
height,width,c = bgr.shape
h = random.uniform(0.6*height,height)
w = random.uniform(0.6*width,width)
x = random.uniform(0,width-w)
y = random.uniform(0,height-h)
x,y,h,w = int(x),int(y),int(h),int(w)
center = center - torch.FloatTensor([[x,y]]).expand_as(center)
mask1 = (center[:,0]>0) & (center[:,0]<w)
mask2 = (center[:,1]>0) & (center[:,0]<h)
mask = (mask1 & mask2).view(-1,1)
boxes_in = boxes[mask.expand_as(boxes)].view(-1,4)
if(len(boxes_in)==0):
return bgr,boxes,labels
box_shift = torch.FloatTensor([[x,y,x,y]]).expand_as(boxes_in)
boxes_in = boxes_in-box_shift
boxes_in[:,0]=boxes_in[:,0].clamp(0,w)
boxes_in[:,2]=boxes_in[:,2].clamp(0,w)
boxes_in[:,1]=boxes_in[:,1].clamp(0,h)
boxes_in[:,3]=boxes_in[:,3].clamp(0,h)
labels_in = labels[mask.view(-1)]
img_croped = bgr[y:y+h,x:x+w,:]
return img_croped,boxes_in,labels_in
return bgr,boxes,labels
def subMean(self,bgr,mean):
mean = np.array(mean,dtype=np.float32)
bgr = bgr - mean
return bgr
def random_flip(self,im,boxes):
if random.random() < 0.5:
im_lr = np.fliplr(im).copy()
h,w,_ = im.shape
xmin = w - boxes[:,2]
xmax = w - boxes[:,0]
boxes[:,0] = xmin
boxes[:,2] = xmax
return im_lr,boxes
return im,boxes
def random_bright(self,im,delta=16):
alpha = random.random()
if alpha > 0.3:
im = im * alpha + random.randrange(-delta,delta)
im = im.clip(min=0,max=255).astype(np.uint8)
return im
if __name__=='__main__':
from torch.utils.data import DataLoader
import torchvision.transforms as transforms
file_root ='D:\python\py_works\deep_learning\_04_computer_cv\_01_yolo_v1_code' ## xx.jpg
list_f = r'D:\python\py_works\deep_learning\_04_computer_cv\_01_yolo_v1_code\2007_train.txt'
train_dataset = yoloDataset(root=file_root,list_file=list_f,train=True,transform = [transforms.ToTensor()])
train_loader = DataLoader(train_dataset,batch_size=1,shuffle=False,num_workers=0)
train_iter = iter(train_loader)
# for i in range(5):
# img,target = next(train_iter)
# print(target[target[...,0]>0])
for i,(images,target) in enumerate(train_loader):
print(1111111111111111111111)
print(target)
print(images)
2.3 yolo_v1的训练
论文中的主干模型是由24层卷积和两个全联接组成。下面代码中训练主要包括backbone(ResNet、VGG)、LOSS、代入数据训练模型。
2.3.1 主干网络backbone
2.3.1.1 利用ResNet作为主干网络
ResNet主要分为三部分。首先通过卷积和池化进行两次步长为2的下采样,然后通过残差模块layer1~layer5扩展通道数和三次步长为2的下采样,最后一次卷积、批归一化、激活得到特征图[7,7,30]。
我们使用下面的resnet50网络,按照YOLOV1的要求输入图像的尺寸为448×448×3,要求输出7×7×30的张量,而ResNet50可以输入224任意倍数的彩色三通道图片(当然也包括448),所以与YOLOV1算法契合度较高。若输入448×448×3的图片经过ResNet50会得到2048×14×14的张量,所以还需要进行后续处理。
import math
import torch.nn as nn
import torch.utils.model_zoo as model_zoo
import torch.nn.functional as F
__all__ = ['ResNet','resnet18','resnet34','resnet50','resnet101','resnet152']
model_urls = {
'resnet18': 'https://download.pytorch.org/models/resnet18-5c106cde.pth',
'resnet34': 'https://download.pytorch.org/models/resnet34-333f7ec4.pth',
# 'resnet50': 'https://download.pytorch.org/models/resnet50-19c8e357.pth',
'resnet50': 'https://download.pytorch.org/models/resnet50-0676ba61.pth',
'resnet101': 'https://download.pytorch.org/models/resnet101-5d3b4d8f.pth',
'resnet152': 'https://download.pytorch.org/models/resnet152-b121ed2d.pth',
}
def conv3x3(in_planes,out_planes,stride=1):
return nn.Conv2d(in_planes,out_planes,kernel_size=3,stride=stride,padding=1,bias=False)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self,inplanes,planes,stride=1,downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self,x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes,planes,kernel_size=1,bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes,planes,kernel_size=3,stride=stride,padding=1,bias=False)
self.bn2 = nn.BatchNorm2d(planes)
# self.conv3 = nn.Conv2d(inplanes, planes * self.expansion, kernel_size=1,bias=False)
self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1,bias=False)
self.bn3 = nn.BatchNorm2d(planes* self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self,x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class detnet_bottleneck(nn.Module):
# no expansion
# dilation = 2
# type B use 1x1 conv
expansion = 1
def __init__(self, in_planes, planes, stride=1, block_type='A'):
super(detnet_bottleneck, self).__init__()
self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, padding=2, bias=False,dilation=2)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, self.expansion*planes, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(self.expansion*planes)
self.downsample = nn.Sequential()
if stride != 1 or in_planes != self.expansion*planes or block_type == 'B':
self.downsample = nn.Sequential(
nn.Conv2d(in_planes, self.expansion*planes, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion*planes)
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = F.relu(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
out += self.downsample(x)
out = F.relu(out)
return out
class ResNet(nn.Module): # model = ResNet(BasicBlock, [3, 4, 6, 3], **kwargs)
def __init__(self, block, layers, num_classes=1470):
self.inplanes = 64
super(ResNet, self).__init__()
self.conv1 = nn.Conv2d(3,64,kernel_size=7,stride=2,padding=3,bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3,stride=2,padding=1) # torch.Size([2, 64, 112, 112])
self.layer1 = self._make_layer(block,64,layers[0])
self.layer2 = self._make_layer(block,128,layers[1],stride=2)
self.layer3 = self._make_layer(block,256,layers[2],stride=2)
self.layer4 = self._make_layer(block,512,layers[3],stride=2)
# self.layer5 = self._make_detnet_layer(in_channels=512)
self.layer5 = self._make_detnet_layer(in_channels=2048) # (in_channels=2048)
self.avgpool = nn.AvgPool2d(2) # 添加平均池化层,kernel_size = 2 , stride = 2
self.conv_end = nn.Conv2d(256,30,kernel_size=3,stride=1,padding=1,bias=False)
self.bn_end = nn.BatchNorm2d(30)
for m in self.modules():
if isinstance(m,nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0,math.sqrt(2./n))
elif isinstance(m,nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self,block, planes, blocks, stride=1): # 64,3
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes,planes*block.expansion,kernel_size=1,stride=stride,bias=False),
nn.BatchNorm2d(planes*block.expansion),
)
layers = []
layers.append(block(self.inplanes,planes,stride,downsample))
self.inplanes = planes*block.expansion
for i in range(1,blocks):
layers.append(block(self.inplanes,planes))
return nn.Sequential(*layers)
def _make_detnet_layer(self,in_channels):
layers = []
layers.append(detnet_bottleneck(in_planes=in_channels, planes=256, block_type='B'))
layers.append(detnet_bottleneck(in_planes=256, planes=256, block_type='A'))
layers.append(detnet_bottleneck(in_planes=256, planes=256, block_type='A'))
return nn.Sequential(*layers)
def forward(self,x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
# print(x.shape)
x = self.layer5(x)
# print(x.shape)
x = self.avgpool(x) # batch_size*256*7*7
# print(x.shape)
x = self.conv_end(x)
x = self.bn_end(x)
x = F.sigmoid(x)
x = x.permute(0,2,3,1)
return x
def resnet18(pretrained=False,**kwargs):
model = ResNet(BasicBlock, [2, 2, 2, 2], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet18']))
return model
def resnet34(pretrained=False,**kwargs):
model = ResNet(BasicBlock, [3, 4, 6, 3], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet34']))
return model
def resnet50(pretrained=False,**kwargs):
model = ResNet(Bottleneck, [3, 4, 6, 3], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet50']))
return model
def resnet101(pretrained=False,**kwargs):
model = ResNet(BasicBlock, [3, 4, 23, 3], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet101']))
return model
def resnet152(pretrained=False,**kwargs):
model = ResNet(BasicBlock, [3, 8, 36, 3], **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['resnet152']))
return model
def test():
import torch
from torch.autograd import Variable
# model = resnet18()
model = resnet50()
x = torch.rand(1, 3, 448, 448)
# x = torch.rand(1, 3, 224, 224)
x = Variable(x)
out = model(x)
print(out.shape)
if __name__ == '__main__':
test()
2.3.1.2 利用VGG作为主干网络
VGG 模型分为两大部分,一部分用卷积、池化提取特征,然后通过两次全连接得到特征。
import math
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.model_zoo as model_zoo
__all__ = ['VGG','vgg11','vgg11_bn',
'vgg13','vgg13_bn', 'vgg16',
'vgg16_bn','vgg19','vgg19_bn']
model_urls = {
'vgg11': 'https://download.pytorch.org/models/vgg11-bbd30ac9.pth',
'vgg13': 'https://download.pytorch.org/models/vgg13-c768596a.pth',
'vgg16': 'https://download.pytorch.org/models/vgg16-397923af.pth',
'vgg19': 'https://download.pytorch.org/models/vgg19-dcbb9e9d.pth',
'vgg11_bn': 'https://download.pytorch.org/models/vgg11_bn-6002323d.pth',
'vgg13_bn': 'https://download.pytorch.org/models/vgg13_bn-abd245e5.pth',
'vgg16_bn': 'https://download.pytorch.org/models/vgg16_bn-6c64b313.pth',
'vgg19_bn': 'https://download.pytorch.org/models/vgg19_bn-c79401a0.pth',
}
class VGG(nn.Module):
def __init__(self,features,num_classes=1000,image_size=448):
super(VGG,self).__init__()
self.features = features
self.image_size = image_size
self.classifier = nn.Sequential(
nn.Linear(512*7*7,4096),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096, 4096),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(4096,1470))
self._initialize_weights()
def forward(self,x):
x = self.features(x)
x = x.view(x.size(0),-1)
x = self.classifier(x)
x = F.sigmoid(x)
x = x.view(-1,7,7,30)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m,nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0,math.sqrt(2./n))
if m.bias is not None:
m.bias.data.zero_()
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
m.weight.data.normal_(0, 0.01)
m.bias.data.zero_()
def make_layers(cfg,batch_norm=False):
layers = []
in_channels = 3
first_flag = True
for v in cfg:
s = 1
if (v == 64 and first_flag):
s = 2
first_flag = False
if v == 'M':
layers += [nn.MaxPool2d(kernel_size=2,stride=2)]
else:
conv2d = nn.Conv2d(in_channels,v,kernel_size=3,stride=s,padding=1)
if batch_norm:
layers += [conv2d,nn.BatchNorm2d(v),nn.ReLU(inplace=True)]
else:
layers += [conv2d,nn.ReLU(inplace=True)]
in_channels = v
return nn.Sequential(*layers)
cfg = { 'A': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'B': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'D': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
'E': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M']}
def vgg11(pretrained=False,**kwargs):
model = VGG(make_layers(cfg['A']),**kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['vgg11']))
return model
def vgg11_bn(pretrained=False,**kwargs):
model = VGG(make_layers(cfg['A'],batch_norm=True),**kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url([vgg11_bn]))
return model
def vgg13(pretrained=False,**kwargs):
model = VGG(make_layers(cfg['B']),**kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['vgg13']))
return model
def vgg13_bn(pretrained=False, **kwargs):
model = VGG(make_layers(cfg['B'], batch_norm=True), **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['vgg13_bn']))
return model
def vgg16(pretrained=False, **kwargs):
model = VGG(make_layers(cfg['D']), **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['vgg16']))
return model
def vgg16_bn(pretrained=False, **kwargs):
model = VGG(make_layers(cfg['D'], batch_norm=True), **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['vgg16_bn']))
return model
def vgg19(pretrained=False, **kwargs):
model = VGG(make_layers(cfg['E']), **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['vgg19']))
return model
def vgg19_bn(pretrained=False, **kwargs):
model = VGG(make_layers(cfg['E'], batch_norm=True), **kwargs)
if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['vgg19_bn']))
return model
def test():
import torch
from torch.autograd import Variable
model = vgg16()
img = torch.rand(2,3,448,448)
img = Variable(img)
output = model(img)
print(output.size())
if __name__ == '__main__':
test()
2.3.2 损失函数
2.3.2.1 损失函数
YOLOV1计算损失的特殊性:用MSE计算损失,对框回归的宽高先开方在进行MSE,解决大小物体损失差异过大的问题。对回归和前景分类赋予不同的权重,解决正负样本不均衡问题。
计算损失时,输入的是真实框target_tensor、和解码后的预测框pred_tensor[batch_size,7,7,30].
(1)计算损失流程:
- 根据真实框的置信度对target_tensor和pred_tensor取出没有真实框的样本sample_nobj[-1,30],在取出样本的第5列和第10列,用mse计算负样本的损失noobj_loss。
- 根据真实框的置信度对target_tensor和pred_tensor取出没有真实框的样本sample_obj[-1,30]。对取出的样本分别在提取target_tensor和pred_tensor的框和物体类别,计算类别损失。
- 根据sample_obj,计算预测框和真实框的IuO,根据IuO选出与真实框匹配的样本,计算框的回归损失和正样本的损失。预测正样本的真实值用IuO计算。
- 对各种损失加权以平衡正负样本不平衡
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.autograd import Variable
class yoloLoss(nn.Module):
def __init__(self,S,B,l_coord,l_noobj):
super(yoloLoss, self).__init__()
self.S = S
self.B = B
self.l_coord = l_coord
self.l_noobj = l_noobj
def compute_iou(self,box1,box2):
'''
Args:
box1[N,4],box2[M,4]
Return:
iou, sized [N,M].
'''
N = box1.size()[0]
M = box2.size()[0]
lt = torch.max(
box1[:,:2].unsqueeze(1).expand(N,M,2),
box2[:,:2].unsqueeze(0).expand(N,M,2)
)
rd = torch.min(
box1[:,2:].unsqueeze(1).expand(N,M,2),
box2[:,2:].unsqueeze(0).expand(N,M,2)
)
wh = rd-lt
wh[wh<0] = 0
inter = wh[...,0] * wh[...,1]
area1 = ((box1[:,2]-box1[:,0])*(box1[:,3]-box1[:,1])).unsqueeze(1).expand_as(inter)
area2 = ((box2[:,2]-box2[:,0])*(box2[:,3]-box2[:,1])).unsqueeze(0).expand_as(inter)
iou = inter/(area1+area2-inter)
return iou
def forward(self,pred_tensor,target_tensor):
''' pred_tensor[b,S,S,B*5+20] ; target_tensor[b,S,S,30]'''
# 1 mask_obj_nobj
N = pred_tensor.size(0)
coo_mask = target_tensor[...,4] > 0 # 存在物体的mask [batch_size,7,7]
noo_mask = target_tensor[...,4] == 0 # 不存在物体的mask
coo_mask = coo_mask.unsqueeze(-1).expand_as(target_tensor) # [b,7,7,30]
noo_mask = noo_mask.unsqueeze(-1).expand_as(target_tensor)
# 2 nobj loss
noo_pred = pred_tensor[noo_mask].view(-1,30) # 没有物体的预测值
# print('noo_mask.shape:',noo_mask.shape)
# print('pred_tensor.shape:',pred_tensor.shape)
# print('noo_pred.shape:',noo_pred.shape)
noo_target = target_tensor[noo_mask].view(-1,30) # 存在物体的预测值
noo_pred_c = noo_pred[:,[4,9]].flatten() # 取出预测值中的负样本的置信度
noo_target_c = noo_target[:,[4,9]].flatten() # 取出标签中负样本的置信度
noobj_loss = F.mse_loss(noo_pred_c,noo_target_c,size_average=False) # 计算负样本损失
# 3 obj: box , class
coo_pred = pred_tensor[coo_mask].view(-1,30) # 存在物体的预测值
box_pred = coo_pred[:,:10].contiguous().view(-1,5) # 预测框
class_pred = coo_pred[:,10:] # 预测类别
coo_target = target_tensor[coo_mask].view(-1,30) # 存在物体的标签
box_target = coo_target[:,:10].contiguous().view(-1,5) # 真实框
class_target = coo_target[:,10:] # 真实类别
# 3.1 class loss
class_loss = F.mse_loss(class_pred,class_target,size_average=False) # 类别损失
# 4 obj_iou(每个网格上有两个预测框,根据IoU选出与真实框最匹配的预测框计算回归损失和正样本损失)
coo_response_mask = torch.ByteTensor(box_target.size()).zero_()
# coo_response_mask = torch.tensor(coo_response_mask,dtype=torch.bool)
box_target_iou = torch.zeros(box_target.size())
for i in range(0,box_target.size(0),2): # 遍历存在物体的框
box1 = box_pred[i:i+2] # 存在物体的两个预测框
box1_xy = Variable(torch.FloatTensor(box1.size()))
box1_xy[:,:2] = box1[:,:2] / 14. - 0.5*box1[:,2:4]
box1_xy[:,2:4] = box1[:,:2] / 14. + 0.5*box1[:,2:4]
box2 = box_target[i].view(-1,5) # 存在物体的一个真实框
box2_xy = Variable(torch.FloatTensor(box2.size()))
box2_xy[:,:2] = box2[:,:2] / 14. - 0.5*box2[:,2:4]
box2_xy[:,2:4] = box2[:,:2] / 14. + 0.5*box2[:,2:4]
iou = self.compute_iou(box1_xy[:,:4],box2_xy[:,:4])
max_iou,max_index = iou.max(0) # 计算预测框和真实框的IoU,并返回最有的IoU和预测框的下标
coo_response_mask[i+max_index] = 1
box_target_iou[i+max_index,4] = max_iou
box_target_iou = Variable(box_target_iou)
# 4.1 obj_loss
box_pred_response = box_pred[coo_response_mask].view(-1,5) # 与真实框最匹配的预测框
box_target_response = box_target[coo_response_mask].view(-1,5) # 真是框,这一步多余。
box_target_response_iou = box_target_iou[coo_response_mask].view(-1,5) # 正样本的概率
# 4.1.1 contain_loss
contain_loss = F.mse_loss(box_pred_response[:,4],box_target_response_iou[:,4],size_average = False) # 正样本损失
# 4.1.2 loc_loss
loc_loss = F.mse_loss(box_pred_response[:,:2],box_target_response[:,:2],size_average = False)+ \
F.mse_loss(torch.sqrt(box_pred_response[:,2:]),torch.sqrt(box_target_response[:,2:]),size_average = False) # 框的回归损失
return (self.l_noobj*noobj_loss + class_loss + 2*contain_loss + self.l_coord*loc_loss)/N 加权平均损失
if __name__ == '__main__':
pred_tensor = torch.randn(2,14,14,30)
target_tensor = pred_tensor+0.01
yolo_loss = yoloLoss(14,8,5,0.5)
loss = yolo_loss(pred_tensor,target_tensor)
print(loss)
2.3.2.2 IoU的计算
I. 计算框相交部分的左上角和右下角坐标lt,rd。
II. 计算交集面积inter和相交框的各自面积area1、area2。
III.根据以上步骤计算交并比iou。
def compute_iou(self,box1,box2):
'''
Args:
box1[N,4],box2[M,4]
Return:
iou, sized [N,M].
'''
N = box1.size()[0]
M = box2.size()[0]
lt = torch.max(
box1[:,:2].unsqueeze(1).expand(N,M,2), # box1.shape[N,4]-->box1[:,:2].shape[N,2]-->box1[:,:2].unsqueeze(1).shape[N,1,2]-->lt.shape[N,M,2]
box2[:,:2].unsqueeze(0).expand(N,M,2)
)
rd = torch.min(
box1[:,2:].unsqueeze(1).expand(N,M,2),
box2[:,2:].unsqueeze(0).expand(N,M,2)
)
wh = rd-lt # wh.shape(N,M,2)
wh[wh<0] = 0
inter = wh[...,0] * wh[...,1] # [N,M]
area1 = ((box1[:,2]-box1[:,0])*(box1[:,3]-box1[:,1])).unsqueeze(1).expand_as(inter) # area1.shape[N,M]
area2 = ((box2[:,2]-box2[:,0])*(box2[:,3]-box2[:,1])).unsqueeze(0).expand_as(inter)
iou = inter/(area1+area2-inter) # iou.shape[N,M]
return iou
2.3.3 训练
训练流程:
- 导入库
- 设置超参数
- 模型
- 导入模型参数
- 损失函数
- 设置优化器
- 导入数据
- 训练
# 1 导入库
import os
os.environ["CUDA_VISIBLE_DEVICES"] = "0"
import torch
from torch.utils.data import DataLoader
import torchvision.transforms as transforms
from torchvision import models
from torch.autograd import Variable
from _05_vgg_yolo import vgg16_bn
from _04_resnet_yolo import resnet50
from _06_yolo_loss import yoloLoss
from _03_data_enhance import yoloDataset
# 忽略烦人的红色提示
import warnings
warnings.filterwarnings("ignore")
import numpy as np
# 2 设置参数
use_gpu = torch.cuda.is_available()
file_root = r'D:\python\py_works\deep_learning\_04_computer_cv\_01_yolo_v1_code'
learning_rate = 0.001
num_epochs = 50
batch_size = 3
use_resnet = True
# 3 backbone
if use_resnet:
net = resnet50()
else:
net = vgg16_bn()
# print(net)
# 3.1 导入预训练参数(我们用restnet50进行训练,这里演示仅仅用了6张图像进行训练)
if use_resnet:
resnet = models.resnet50(pretrained=True) # True
new_state_dict = resnet.state_dict()
dd = net.state_dict()
for k in new_state_dict.keys():
if k in dd.keys() and not k.startswith('fc'):
dd[k] = new_state_dict[k]
net.load_state_dict(dd)
else:
vgg = models.vgg16_bn(pretrained=False)
new_state_dict = vgg.state_dict()
dd = net.state_dict()
for k in new_state_dict.keys():
if k in dd.keys() and k.startswith('features'):
dd[k] = new_state_dict[k]
net.load_state_dict(dd)
if False:
net.load_state_dict(torch.load('best.pth'))
# 4 Loss
criterion = yoloLoss(7,2,5,0.5)
if use_gpu:
net.cuda()
# 模型训练
net.train()
# 5 参数
params = []
params_dict = dict(net.named_parameters())
for k,v in params_dict.items():
if k.startswith('features'):
params += [{'params':[v],'lr':learning_rate*1}]
else:
params += [{'params':[v],'lr':learning_rate*1}]
# 6 优化器
optimizer = torch.optim.SGD(params,lr=learning_rate,momentum=0.9,weight_decay=5e-4)
# 7 导入数据
train_dataset = yoloDataset(root=file_root,list_file='2007_train.txt',train=True,transform = [transforms.ToTensor()] )
train_loader = DataLoader(train_dataset,batch_size=batch_size,shuffle=True,num_workers=0)
test_dataset = yoloDataset(root=file_root,list_file='2007_test.txt',train=False,transform = [transforms.ToTensor()] )
test_loader = DataLoader(test_dataset,batch_size=batch_size,shuffle=False,num_workers=0)
print('the dataset has %d images' % (len(train_dataset)))
print('the batch_size is %d' % (batch_size))
logfile = open('log.txt', 'w')
num_iter = 0
best_test_loss = 1000
# 8 训练
num_batches = len(train_loader)
for epoch in range(num_epochs):
net.train() # 设置为训练模式
if epoch == 30:
learning_rate = 0.0001
if epoch == 40:
learning_rate = 0.00001
for params_group in optimizer.param_groups:
params_group['lr'] = learning_rate
print('\n\nStarting epoch %d / %d' % (epoch + 1, num_epochs))
print('Learning Rate for this epoch: {}'.format(learning_rate))
total_loss = 0.
for i,(images,target) in enumerate(train_loader):
images = Variable(images)
print(images.shape)
target = Variable(target)
if use_gpu:
images,target = images.cuda(),target.cuda()
pred = net(images)
# print('pred.shape:',pred.shape)
# print('target.shape:',target.shape)
loss = criterion(pred,target)
total_loss += loss.data.item()
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i+1) % 2 == 0:
print ('Epoch [%d/%d], Iter [%d/%d] Loss: %.4f, average_loss: %.4f'
%(epoch+1, num_epochs, i+1, len(train_loader), loss.data.item(), total_loss / (i+1)))
num_iter += 1
print('loss_train = ', total_loss / (i+1) )
validation_loss = 0.0
net.eval() # 设置为评估模式
for i,(images,target) in enumerate(test_loader):
images = Variable(images,volatile=True)
target = Variable(target,volatile=True)
if use_gpu:
images,target = images.cuda(),target.cuda()
pred = net(images)
loss = criterion(pred,target)
validation_loss += loss.item()
validation_loss /= len(test_loader)
print('loss_val = ',validation_loss)
print('best_test_loss = ', best_test_loss)
if best_test_loss > validation_loss:
best_test_loss = validation_loss
print('get best test loss %.5f' % best_test_loss)
torch.save(net.state_dict(),'best.pth')
logfile.writelines(str(epoch) + '\t' + str(validation_loss) + '\n')
logfile.flush()
torch.save(net.state_dict(),'yolo.pth')

2.3.4 预测
NMS步骤:
(1)对于类别1, 从概率最大的bbox F开始,分别判断A、B、C、D、E与F的IOU是否大于设定的阈值。
(2) 假设B、D与F的重叠度超过阈值,那么就扔掉B、D(将其置信度置0),然后保留F。
(3) 从剩下的矩形框A、C、E中,选择概率最大的E,然后判断A、C与E的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
(4) 重复这个过程,找到此类别所有被保留下来的矩形框。
(5) 对于类别2,类别3等等…都要重复以上4个步骤。
-
首先需要导入模型以及参数,并且设置好有关NMS的两个参数:
置信度以及IOU最大值。然后就可以开始预测了。首先需要通过opencv读取图片并且将其resize为448✖448的RGB图像,将其进行均值处理后输入神经网络得到7✖7✖30的张量。 -
然后运行 decode 方法:因为一个grid ceil只预测一个物体,而一个grid ceil生成两个bbox。这里对grid ceil进行以下操作。
- 1、选择置信度较高的bbox。
- 2、选择20种类别概率中的最大者作为这个grid ceil预测的类别。
- 3、置信度乘以物体类别概率作为物体最终的概率。
- 最终输入一个7✖7✖6的张量,7✖7代表grid ceil。6 = bbox的4个坐标信息+类别概率+类别代号
-
最后运行 NMS 方法对bbox进行筛选:因为bbox的4个坐标信息为(xc,yc,w,h)需要将其转化为(x,y,w,h)后才能进行非极大值抑制处理。
import torch
from torch.autograd import Variable
from _04_resnet_yolo import resnet50
import torchvision.transforms as transforms
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 忽略烦人的红色提示
import warnings
warnings.filterwarnings("ignore")
Color = [[0, 0, 0], [128, 0, 0], [0, 128, 0], [128, 128, 0], [0, 0, 128],
[128, 0, 128],[0, 128, 128],[128, 128, 128],[64, 0, 0],[192, 0, 0],
[64, 128, 0],[64, 0, 128],[192, 128, 0],[192, 0, 128],[64, 128, 128],
[192, 128, 128],[0, 64, 0],[128, 64, 0],[0, 192, 0],[128, 192, 0],[0, 64, 128]]
VOC_CLASSES = (
'aeroplane', 'bicycle', 'bird', 'boat',
'bottle', 'bus', 'car', 'cat', 'chair',
'cow', 'diningtable', 'dog', 'horse',
'motorbike', 'person', 'pottedplant',
'sheep', 'sofa', 'train', 'tvmonitor')
CLASS_NUM = len(VOC_CLASSES)
confident = 0.5
iou_con = 0.5
class Pred():
def __init__(self, model, img_root):
self.model = model
self.img_root = img_root
def result(self):
img = cv2.imread(self.img_root)
h, w, _ = img.shape
image = cv2.resize(img, (448, 448))
img = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
mean = (123, 117, 104) # RGB
img = img - np.array(mean, dtype=np.float32)
transform = transforms.ToTensor()
img = transform(img)
img = img.unsqueeze(0) # 输入要求是4维的
Result = self.model(img) # 1*7*7*30
bbox = self.Decode(Result)
bboxes = self.NMS(bbox) # n*6 bbox坐标是基于7*7网格需要将其转换成448
if len(bboxes) == 0:
print("未识别到任何物体")
print("可调小 confident 以及 iou_con")
print("也可能是由于训练不充分,可在训练时将epoch增大")
for i in range(0, len(bboxes)): # bbox坐标将其转换为原图像的分辨率
bboxes[i][0] = bboxes[i][0] * 64
bboxes[i][1] = bboxes[i][1] * 64
bboxes[i][2] = bboxes[i][2] * 64
bboxes[i][3] = bboxes[i][3] * 64
x1 = bboxes[i][0].item() # 后面加item()是因为画框时输入的数据不可一味tensor类型
x2 = bboxes[i][1].item()
y1 = bboxes[i][2].item()
y2 = bboxes[i][3].item()
class_name = bboxes[i][5].item()
label = VOC_CLASSES[int(class_name)]
print('预测的框及类别:', x1, x2, y1, y2, label)
label = VOC_CLASSES[int(class_name)] + str(round(bboxes[i][4].item(), 2)) # 类别及confidence
color = Color[int(class_name)]
text_size, baseline = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
cv2.rectangle(image, (int(x1), int(y1)), (int(x2), int(y2)), color) # 画矩形框
cv2.putText(image, text=label,org=(int(x1), int(y1) + text_size[1]), fontFace=cv2.FONT_HERSHEY_SIMPLEX, fontScale=0.5,color = (255,255,255),thickness=1)
cv2.imshow('img', image)
cv2.waitKey(0)
def Decode(self, result): # x -> 1**7*30
result = result.squeeze() # 7*7*30
grid_ceil1 = result[:, :, 4].unsqueeze(2) # 7*7*1
grid_ceil2 = result[:, :, 9].unsqueeze(2)
grid_ceil_con = torch.cat((grid_ceil1, grid_ceil2), 2) # 7*7*2
grid_ceil_con, grid_ceil_index = grid_ceil_con.max(2) # 按照第二个维度求最大值 7*7 一个grid ceil两个bbox,两个confidence
class_p, class_index = result[:, :, 10:].max(2) # size -> 7*7 找出单个grid ceil预测的物体类别最大者
class_confidence = class_p * grid_ceil_con # 7*7 真实的类别概率
bbox_info = torch.zeros(7, 7, 6)
for i in range(0, 7):
for j in range(0, 7):
bbox_index = grid_ceil_index[i, j]
bbox_info[i, j, :5] = result[i, j, (bbox_index * 5):(bbox_index + 1) * 5] # 删选bbox 0-5 或者5-10
bbox_info[:, :, 4] = class_confidence
bbox_info[:, :, 5] = class_index
return bbox_info # 7*7*6 6 = bbox4个信息+类别概率+类别代号
def NMS(self, bbox, iou_con=iou_con):
"""非极大值抑制"""
for i in range(0, 7):
for j in range(0, 7):
# xc = bbox[i, j, 0] # 目前bbox的四个坐标是以grid ceil的左上角为坐标原点 而且单位不一致
# yc = bbox[i, j, 1] # (xc,yc) 单位= 7*7 (w,h) 单位= 1*1
# w = bbox[i, j, 2] * 7
# h = bbox[i, j, 3] * 7
# Xc = i + xc
# Yc = j + yc
# xmin = Xc - w/2 # 计算bbox四个顶点的坐标(以整张图片的左上角为坐标原点)单位7*7
# xmax = Xc + w/2
# ymin = Yc - h/2
# ymax = Yc + h/2 # 更新bbox参数 xmin and ymin的值有可能小于0
xmin = j + bbox[i, j, 0] - bbox[i, j, 2] * 7 / 2 # xmin
xmax = j + bbox[i, j, 0] + bbox[i, j, 2] * 7 / 2 # xmax
ymin = i + bbox[i, j, 1] - bbox[i, j, 3] * 7 / 2 # ymin
ymax = i + bbox[i, j, 1] + bbox[i, j, 3] * 7 / 2 # ymax
bbox[i, j, 0] = xmin
bbox[i, j, 1] = xmax
bbox[i, j, 2] = ymin
bbox[i, j, 3] = ymax
bbox = bbox.view(-1, 6) # 49*6
bboxes = []
ori_class_index = bbox[:, 5]
class_index, class_order = ori_class_index.sort(dim=0, descending=False)
class_index = class_index.tolist() # 从0开始排序到7
bbox = bbox[class_order, :] # 更改bbox排列顺序
a = 0
for i in range(0, CLASS_NUM):
num = class_index.count(i)
if num == 0:
continue
x = bbox[a:a + num, :] # 提取同一类别的所有信息
score = x[:, 4]
score_index, score_order = score.sort(dim=0, descending=True)
y = x[score_order, :] # 同一种类别按照置信度排序
if y[0, 4] >= confident: # 物体类别的最大置信度大于给定值才能继续删选bbox,否则丢弃全部bbox
for k in range(0, num):
y_score = y[:, 4] # 每一次将置信度置零后都重新进行排序,保证排列顺序依照置信度递减
_, y_score_order = y_score.sort(dim=0, descending=True)
y = y[y_score_order, :]
if y[k, 4] > 0:
area0 = (y[k, 1] - y[k, 0]) * (y[k, 3] - y[k, 2])
for j in range(k + 1, num):
area1 = (y[j, 1] - y[j, 0]) * (y[j, 3] - y[j, 2])
x1 = max(y[k, 0], y[j, 0])
x2 = min(y[k, 1], y[j, 1])
y1 = max(y[k, 2], y[j, 2])
y2 = min(y[k, 3], y[j, 3])
w = x2 - x1
h = y2 - y1
if w < 0 or h < 0:
w = 0
h = 0
inter = w * h
iou = inter / (area0 + area1 - inter)
# iou大于一定值则认为两个bbox识别了同一物体删除置信度较小的bbox
# 同时物体类别概率小于一定值则认为不包含物体
if iou >= iou_con or y[j, 4] < confident:
y[j, 4] = 0
for mask in range(0, num):
if y[mask, 4] > 0:
bboxes.append(y[mask])
a = num + a
return bboxes
if __name__ == '__main__':
model = resnet50()
print('load model...')
model.load_state_dict(torch.load('best.pth'))
model.eval()
#model.cuda()
image_name = 'D:\python\py_works\deep_learning\_04_computer_cv\data\VOCdevkit\VOC2007\JPEGImages/000018.jpg'
image = cv2.imread(image_name)
print(image.shape)
print('predicting...')
pred = Pred(model,image_name)
pred.result()
