图的企业应用-A*算法自动寻路
引言
MC想必大家都玩过,但鸡哥利用A*自动寻路算法来找箱子 箱子里有鸡你太美唱片,和准备好的篮球
当然在这是游戏中找到的宝箱 还得原石x5等一大堆的养成物品 ???等等 ,原神 玩家露出鸡脚了吧! 不应该是 有鸡你太美唱片,还有一条鱼并且给梅里猫的名叫荔枝的? 这梅里猫 :说这一句话:“告诉,老默 我想吃鱼”,另一种猫叫:芝士猫"好,干 到沈阳没你好果子吃啊 " 突然一只名叫嘎子的人正在为狗子卖到缅北噶腰子 这只狗不听话:曾经是脚盆鸡的特派员 专门搞种花家的人民 于是种花家的人民军队 非常愤怒,更加愤怒的是那些没有一点察觉到危险性,
某泰民用灰机局,公然歧视兔子带来的人民,好家伙 紫荆花地区区长非常失望,…
那么怎么自动寻路? 那怎么到达这个地点 并且拿出 这么多的信息 当然最重要是鸡你太美唱片,篮球 还有那只梅里猫-荔枝
算法原理
为了便于鸡哥自动寻路,那么我们可以简化为网格形状如下图所示
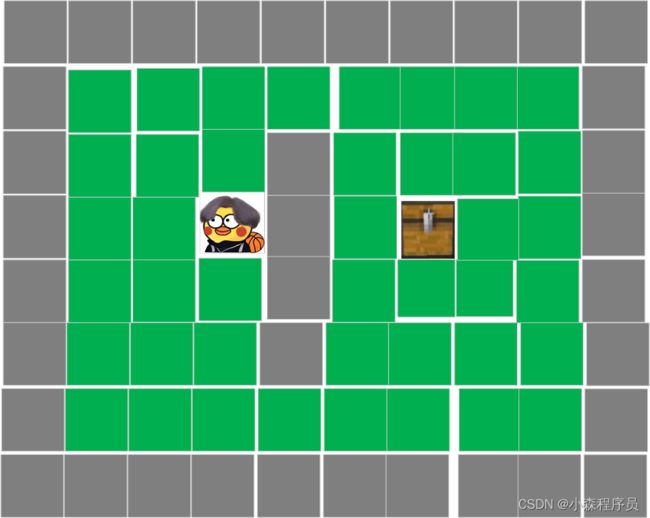
现在鸡哥正在急着找到 他的唱片 <鸡你太美和他的"原神原石还有养成物品,那只梅里猫的毛茸茸的玩具:名叫荔枝">
怎么办呢 emmmm 想着想着,还是靠场外的 网络ikun 疯狂打call 说"蔡徐坤"问题是在这里只有获得宝箱的才能,给手机,发维搏
其实这群网络真Ikun们一直等着我们家giegie出来发微博,…
突然想到了什么 我居然无法看终点在哪里,试着上下左右方向找 并且记录着当前走过 路径,走着走着就 发现可以预测需要走多少不才能终点 那我就不客气啦![]()
经过计算 后

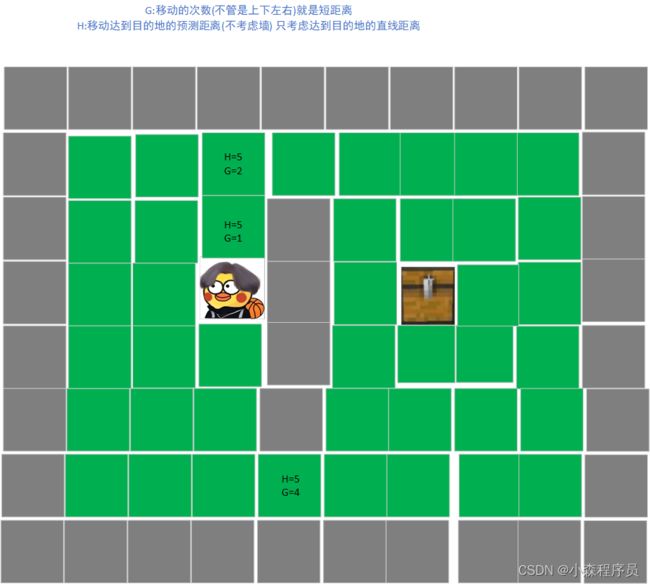
G:移动的次数(不管是上下左右)就是短距离
H:移动达到目的地的预测距离(不考虑墙) 只考虑达到目的地的直线距离
坤坤借着这个机会好好的恶补了下数学 突然开窍咯!
但坤坤发现没法弄呀的,大量的计算才行,于是乎陷入了迷茫之中 …
突然后背一个人 这个人不用多说:“是作者本人” 请问:“你需要技术支持吗”![]()
技术支持? 对呀 其实对于这个简单的 也不简单 ,说他简单是因为二维数组 相当于数学的矩阵 数学那套还是挺管用的 ,但没有计算机怎么的算力 我可以帮你解决事情 但别再让你粉丝买流量 否则技术,让你难堪,你懂的![]()
是技术帮你维护 每一个热搜 没了技术哪来的这个平台 你说是不是呀 ![]()
“对对对”,技术是我的救命恩人 …
首先从上标粗的这段话很好理解一下,然后每一个方格对应的是元素 名叫地图元素 也就是所说的二维数组元素
只是大部分方格包含 地图坐标系x,y G ,H
假设坤坤在这个地方
G:移动的次数(不管是上下左右)就是短距离
H:移动达到目的地的预测距离(不考虑墙) 只考虑达到目的地的直线距离
坤坤可能觉得 往右走好一些 坤坤往右走一步 G=1 ,H=5 坤坤再往上走一步 G=2 ,H=5 坤坤再往上走一步 G=3 ,H=5
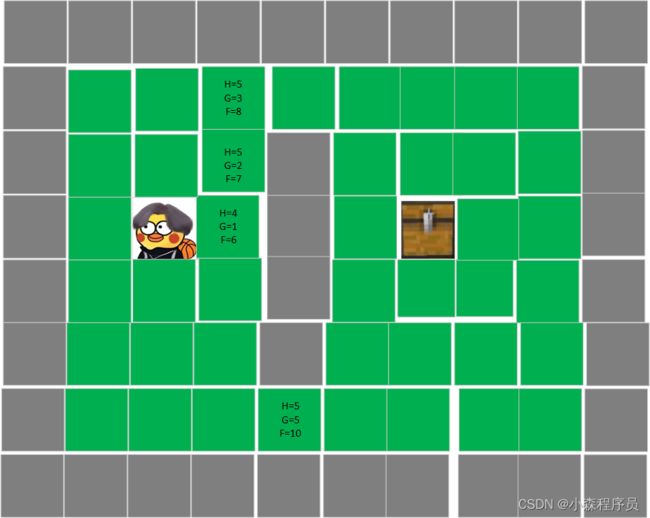
那这个F是是什么意思呢

G:移动的次数(不管是上下左右)就是短距离
H:移动达到目的地的预测距离(不考虑墙) 只考虑达到目的地的直线距离
F:总经过的路程 =H+G


- 核心思路:
- 将起点加入open列表,起点的g值(实际花费)和h值(启发式评估值)初始化为0,起点的父节点设置为null。
- 从open列表中选择f值(g值+h值,衡量路径承诺程度)最小的节点。这个节点的f值越小,表示该节点越有可能是最短路径的一部分。
- 将选择出的节点从open列表移到closed列表。
- 如果选择出的节点是目标节点,则构建路径并结束。else继续下一步。
- 扩展当前选择出的节点,得到其相邻节点。
- 对于每个相邻节点,如果在closed列表中则忽略,否则进行如下操作:
- 计算相邻节点的g值(等于父节点的g值+移动到相邻节点的代价)
- 计算相邻节点的h值(使用启发式函数)
- 计算相邻节点的f值(g值+h值)
- 如果相邻节点在open列表中,并且新的g值更小,则更新相邻节点的g值、f值和父节点
- 否则,将相邻节点添加到open列表,并设置相邻节点的父节点、g值和f值
- 重复2-6步,直到找到目标节点position。
- 通过追踪父节点,从目标节点position反向构建最短路径。
- 返回最短路径。
A*算法实现
A*算法声明
#ifndef __ASTAR_H__
#define __ASTAR_H__
#include
using std::list;
//AI寻路地图
struct AIPathMap {
int* map;
int Rows;
int Cols;
};
//AI寻路地图道具
enum AIPathMapItem {
//墙
Wall,
//地面
Ground,
//坤坤
KunKun,
//箱子
Box
};
// AIpoint 结构体,表示二维平面上的点
struct AIpoint {
int x; // x坐标
int y; // y坐标
};
// AIPathStrategy 结构体,表示到达点的路径策略
struct AIPathStrategy {
int G; // 移动的次数(上下左右都算一次短距离)
int H; // 移动达到目的地的预测距离(不考虑墙,只考虑直线距离)
int F; // 总经过的路程(H + G)
};
// AIGrid 结构体,表示二维平面上的网格,包含一个点和一个路径策略
struct AIGrid {
AIpoint point; // 点结构体
AIPathStrategy PathStrategy; // 路径策略结构体
AIGrid* Parent; // 指向父网格的指针
};
//直移一格 消耗
const int MoveStraightOneSpace = 10;
//斜移一格 消耗
const int MoveSidewaysOneSpace = 14;
//初始化AI寻路地图
void InitAIPathMap(int *map,int Rows,int Cols);
//接收两个整数参数,分别表示点的 x 和 y 坐标,返回一个新的 AIpoint 结构体,表示该点。
AIpoint CreatorAAIpoint(int x, int y);
//接收两个 AIpoint 类型的引用参数,表示起点和终点,返回一个包含 AIGrid 结构体的链表,表示从起点到终点自动寻找路径的结果。
list<AIGrid*> AStarAutoPath(AIpoint &start, AIpoint &end);
//创建全局资源
void CreatorGlobalResource();
//释放全局资源
void ReleaseGlobalResources();
#endif // !__ASTAR_H__
A*算法实现
#include "AStar.h"
#include
#include这是bug
//判断是否可达到方格
static bool IsReachGrid(const AIGrid* Grid, const AIGrid* targetGrid) {
AIPathMap& Map = AStarAutoPaths->Map;
auto& PathMap = Map.map;
const AIpoint& GridPoint = Grid->point;
const AIpoint& targetGridPoint = targetGrid->point;
if ((IsInMap(Map, targetGridPoint) || (HasGridMeetCondition(Map, targetGridPoint, Ground, Box) || IsSamePoint(GridPoint, targetGridPoint)) || isInList(AStarAutoPaths->CloseList, targetGrid))) {
return false;
}
return isAdj(GridPoint, targetGridPoint);
}
不,来看一下输出
0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 1 1 1 1 1 1 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 3 1 1 1 0
0 1 1 1 2 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 1 1 1 1 1 1 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
坤坤: 方格坐标 x =5 方格坐标 y =4 到 宝箱: 方格坐标 x =4 方格坐标 y =9
解决方案:
//判断是否可达到方格
static bool IsReachGrid(const AIGrid* Grid, const AIGrid* targetGrid) {
AIPathMap& Map = AStarAutoPaths->Map;
auto& PathMap = Map.map;
const AIpoint& GridPoint = Grid->point;
const AIpoint& targetGridPoint = targetGrid->point;
if ((IsInMap(Map, targetGridPoint) || (HasGridMeetCondition(Map, targetGridPoint, Ground, Box) && IsSamePoint(GridPoint, targetGridPoint)) || isInList(AStarAutoPaths->CloseList, targetGrid))) {
return false;
}
return isAdj(GridPoint, targetGridPoint);
}
如果你觉得这样就结束了![]()
不,来看一下输出
0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 1 1 1 1 1 1 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 3 1 1 1 0
0 1 1 1 2 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 1 1 1 1 1 1 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
坤坤: 方格坐标 x =5 方格坐标 y =4 到 宝箱: 方格坐标 x =4 方格坐标 y =9
第二个 bug
//判断是否可达到方格
static bool IsReachGrid(const AIGrid* Grid, const AIGrid* targetGrid) {
AIPathMap& Map = AStarAutoPaths->Map;
auto& PathMap = Map.map;
const AIpoint& GridPoint = Grid->point;
const AIpoint& targetGridPoint = targetGrid->point;
if ((IsInMap(Map, targetGridPoint) || (HasGridMeetCondition(Map, targetGridPoint, Ground, Box) && IsSamePoint(GridPoint, targetGridPoint)) || isInList(AStarAutoPaths->CloseList, targetGrid))) {
return false;
}
return isAdj(GridPoint, targetGridPoint);
0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 1 1 1 1 1 1 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 2 1 1 0 1 3 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 1 1 1 1 1 1 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
坤坤: 方格坐标 x =4 方格坐标 y =4 到 宝箱: 方格坐标 x =4 方格坐标 y =9
方格坐标 x =4 方格坐标 y =4 方格策略 G =0 方格策略H =0 方格策略F =0
方格坐标 x =4 方格坐标 y =5 方格策略 G =10 方格策略H =12 方格策略F =22
方格坐标 x =4 方格坐标 y =6 方格策略 G =10 方格策略H =9 方格策略F =19
方格坐标 x =4 方格坐标 y =7 方格策略 G =20 方格策略H =6 方格策略F =26
方格坐标 x =4 方格坐标 y =8 方格策略 G =20 方格策略H =3 方格策略F =23
方格坐标 x =4 方格坐标 y =9 方格策略 G =30 方格策略H =0 方格策略F =30
虽然输出结果了但还是有点不对劲
你会发现直线也可以走? 离谱!
最终的解决方案是
return isAdj(GridPoint, targetGridPoint)&& isAdj(GridPoint, targetGridPoint) && HasGridMeetCondition(Map, targetGridPoint, Ground, Box);
//判断一个方格是否可达(未在关闭列表且相邻)
bool IsReachGrid(const AIGrid* Grid, const AIGrid* targetGrid) {
AIPathMap& Map = AStarAutoPaths->Map; // 地图
auto& PathMap = Map.map; // 地图数据
const AIpoint& GridPoint = Grid->point; // 当前方格坐标
const AIpoint& targetGridPoint = targetGrid->point; // 目标方格坐标
if ((IsCoordInMap(Map, targetGridPoint) || // 目标方格在地图内或
(DoesGridMeetCondition(Map, targetGridPoint, Ground, Box) && // 满足条件且与当前方格相同
AreCoordsEqual(GridPoint, targetGridPoint)) ||
isInList(AStarAutoPaths->CloseList, targetGrid))) { // 目标方格在关闭列表中
return false;
}
// 相邻方格 // /满足条件
return isAdj(GridPoint, targetGridPoint) && DoesGridMeetCondition(Map, targetGridPoint, Ground, Box);
}
0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 1 1 1 1 1 1 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 2 1 1 0 1 3 1 1 1 0
0 1 1 1 1 1 1 0 1 1 1 1 1 0
0 1 1 1 1 1 1 1 1 1 1 1 1 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
坤坤: 方格坐标 x =4 方格坐标 y =4 到 宝箱: 方格坐标 x =4 方格坐标 y =9
方格坐标 x =4 方格坐标 y =4 方格策略 G =0 方格策略H =0 方格策略F =0
方格坐标 x =4 方格坐标 y =5 方格策略 G =10 方格策略H =12 方格策略F =22
方格坐标 x =4 方格坐标 y =6 方格策略 G =10 方格策略H =9 方格策略F =19
方格坐标 x =5 方格坐标 y =6 方格策略 G =20 方格策略H =9 方格策略F =29
方格坐标 x =6 方格坐标 y =6 方格策略 G =20 方格策略H =9 方格策略F =29
方格坐标 x =6 方格坐标 y =7 方格策略 G =30 方格策略H =6 方格策略F =36
方格坐标 x =6 方格坐标 y =8 方格策略 G =30 方格策略H =3 方格策略F =33
方格坐标 x =5 方格坐标 y =8 方格策略 G =40 方格策略H =2 方格策略F =42
方格坐标 x =4 方格坐标 y =8 方格策略 G =40 方格策略H =1 方格策略F =41
方格坐标 x =4 方格坐标 y =9 方格策略 G =50 方格策略H =0 方格策略F =50