利用罗德里格斯正逆公式,自己实现李群SO3(R),SE3(T)和李代数so3(Phi)(theta_n),se3(p,Phi)之间的转换
-
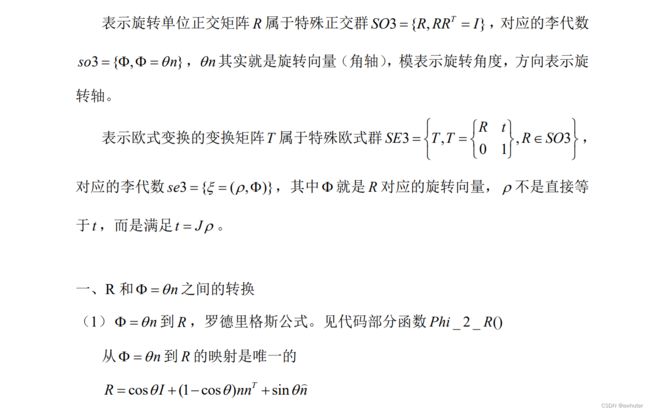
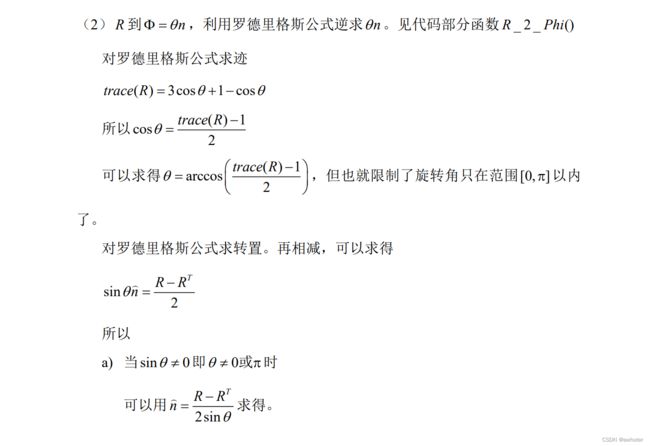
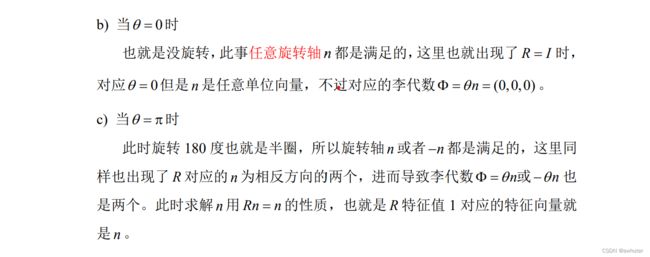
特殊正交群R和Phi=theta_n之间的转换
-
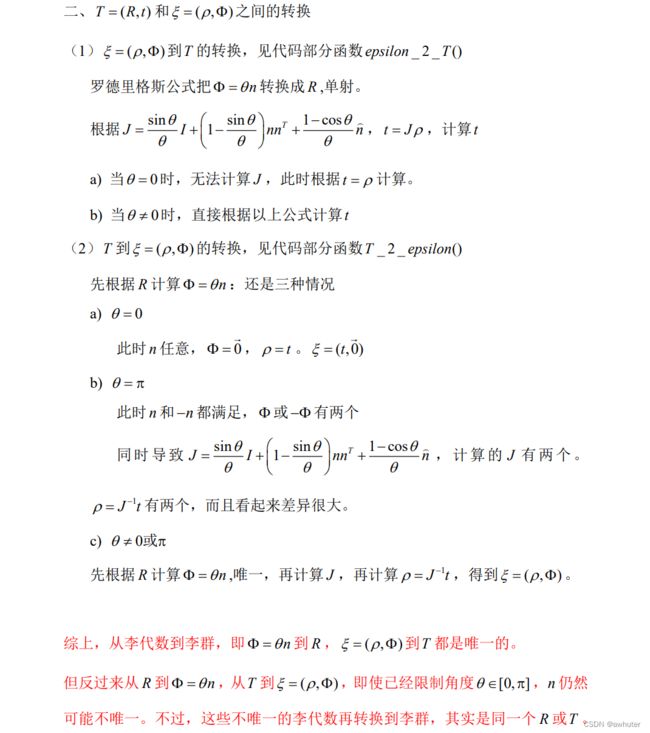
特殊欧式群T和epsilon=(p, theta_n)之间的转换
3. 代码实现以上李群和李代数之间的转换计算
#include