3D视觉学习计划之点云的滤波
3D视觉学习计划之点云的滤波
前言
点云滤波是一种用于去除点云数据中噪声和异常值的技术。点云数据通常由激光雷达或摄像头等设备采集,由于设备本身的误差或环境因素的影响,采集到的数据中可能会包含一些噪声和异常值。这些噪声和异常值会影响后续的点云处理和分析,因此需要进行滤波处理。
点云滤波的主要方法包括:体素滤波器(Voxel Grid Filter)、半径滤波器(Radius Outlier Removal)、统计滤波器(Statistical Outlier Removal)、直通滤波器和双边滤波等方法,接下来对各种点云滤波方法进行操作。
一、直通滤波器
1.概念
点云滤波中,直通滤波器是一种简单的滤波方法,用于去除点云数据中的离群点。直通滤波器通过设置一个范围,将点云数据中不在该范围内的点过滤掉。这个范围可以是一个固定的数值,也可以是根据点云数据的统计特征动态计算得出的。直通滤波器适用于需要去除点云数据中的离群点,但不需要对点云数据进行过多处理的场景,例如点云数据的可视化等。
2.示例代码
python版本
import open3d as o3d
import numpy as np
# 读取点云数据
pcd = o3d.io.read_point_cloud("/home/cj/chaintwork/pcl/code/filtering/py-test/ism_test_horse.pcd")
# 创建一个AxisAlignedBoundingBox对象
bbox = o3d.geometry.AxisAlignedBoundingBox(min_bound=np.array([0, 0, 0]), max_bound=np.array([1000.0, 1000.0, 1000.0]))
# 进行直通滤波
pass_through = pcd.crop(bbox)
# 检查点云数据中的点数
print(len(pass_through.points))
# 保存输出点云数据
o3d.io.write_point_cloud("1.pcd", pass_through)
# 可视化输出点云数据
o3d.visualization.draw_geometries([pass_through])

C++版本
代码:
#include Pro文件内容:
TEMPLATE = app
CONFIG += console c++14
CONFIG -= app_bundle
CONFIG -= qt
SOURCES += \
main.cpp
INCLUDEPATH += .\
/usr/local/include/pcl-1.13 \
/usr/include/eigen3 \
/usr/include/vtk-7.1 \
/usr/include/boost
LIBS += /usr/local/lib/lib* \
/usr/lib/x86_64-linux-gnu/libpcl_*.so \
/usr/lib/x86_64-linux-gnu/libvtk*.so \
/usr/lib/x86_64-linux-gnu/libboost_*.so
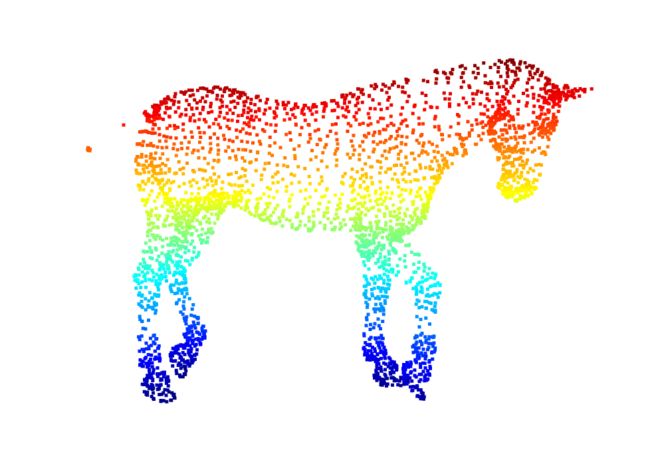
结果

二、体素滤波器
1.概念
体素滤波是点云滤波中的一种方法,也称为体元滤波或体素化滤波。它的原理是将点云数据划分为一个个小的立方体单元,称为体素,然后对每个体素内的点进行处理,以达到滤波的目的。具体来说,体素滤波将每个体素内的点的坐标取平均值,作为该体素的中心点的坐标,从而实现对点云数据的平滑处理。体素滤波的优点是简单易用,可以有效地去除点云数据中的离群点和噪声,但也会导致点云数据的细节丢失。
2.示例代码
python版本
#######体素滤波#########
import open3d as o3d
import numpy as np
# Read point cloud data
pcd = o3d.io.read_point_cloud("/home/cj/chaintwork/pcl/code/filtering/py-test/ism_test_horse.pcd")
# Define the voxel size
voxel_size = 0.05
# Perform voxel downsampling
downsampled = pcd.voxel_down_sample(voxel_size)
# Save the output point cloud data
o3d.io.write_point_cloud("voxel.pcd", downsampled)
# Visualize the output point cloud data
o3d.visualization.draw_geometries([downsampled])
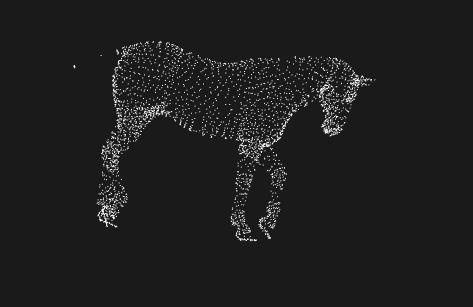
结果
C++版本代码
#include Pro文件同上,结果
三、半径滤波器
1.概念
半径滤波是点云处理中的一种滤波方法,它可以通过移除点云中距离某个点过远的点来减少噪声。
2.示例代码
python版本
import open3d as o3d
# 读取点云数据
pcd = o3d.io.read_point_cloud("/home/cj/chaintwork/pcl/code/filtering/py-test/ism_test_horse.pcd")
# 定义半径和最小邻居数
radius = 5
min_neighbors = 10
# 执行半径滤波
pcd_filtered, _ = pcd.remove_radius_outlier(nb_points=min_neighbors, radius=radius)
# 保存输出点云数据
o3d.io.write_point_cloud("P_Radius.pcd", pcd_filtered)
# 可视化输出点云数据
o3d.visualization.draw_geometries([pcd_filtered])
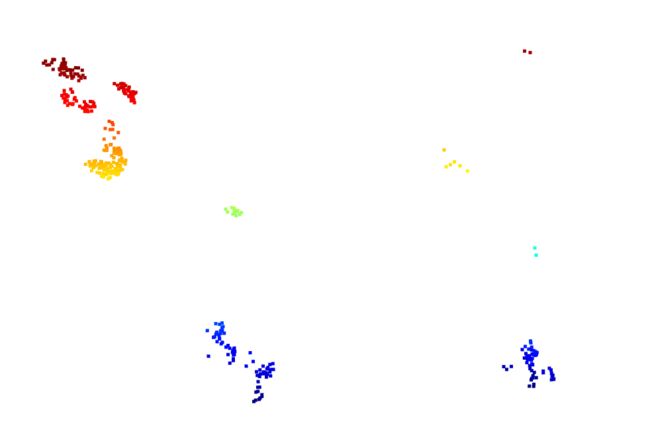
结果
C++版本
#include 结果

四、统计滤波器
1.概念
在点云处理中,统计滤波器是一种基于统计学原理的滤波方法,它可以通过计算点云中每个点周围邻居点的统计特征来判断该点是否为离群点,并将其从点云中移除。常见的统计滤波器包括高斯滤波器、均值滤波器、中值滤波器等。
2.代码示例
python版本
import open3d as o3d
# 读取点云数据
pcd = o3d.io.read_point_cloud("/home/cj/chaintwork/pcl/code/filtering/py-test/ism_test_horse.pcd")
# 定义体素大小
voxel_size = 0.05
# 执行统计滤波
pcd_filtered = pcd.voxel_down_sample(voxel_size=voxel_size)
# 保存输出点云数据
o3d.io.write_point_cloud("output.pcd", pcd_filtered)
# 可视化输出点云数据
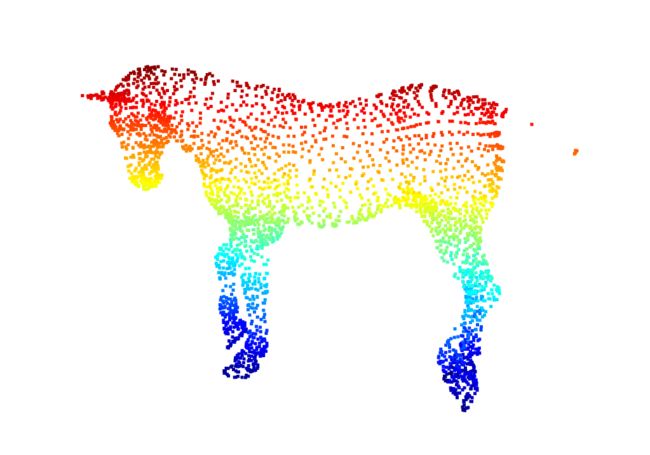
o3d.visualization.draw_geometries([pcd_filtered])
C++版本
#include 