【布局优化】基于遗传算法的车间布局优化 车间设施布局优化【Matlab代码#50】
文章目录
-
- 【`获取资源`请见文章第5节:资源获取】
- 1. 车间布局优化
- 2. 基于GA的布局优化模型
- 3. 部分代码展示
- 4. 仿真结果展示
- 5. 资源获取
【获取资源请见文章第5节:资源获取】
1. 车间布局优化
车间设施布置的规划一直是工业工程领域不断研究和探索的内容,其中最具代表性之一的是系统布置设计(system layout planning,SLP) 方法。作为一种经典且有效的方法,其为设施布置提供了很好的改善思路,但在长期的发展中也存在一些不可避免的缺点,如计算结果不够精确,很难确保计算结果较优且受人员主观因素的影响较大等。
随着计算机技术的快速发展,基于计算机技术的启发式算法在数据处理、数学建模、运算速度等方面相比传统方法具备更大的优势,因此在用 SLP 方法布置时完全可以将大量计算求解的工作交由计算机处理,从而可大幅度提高布置效率和布置结果的精确性。
目前设施布置设计的模型与算法已经比较成熟,常见的有遗传算法、蚁群算法、模拟退火算法等启发式算法。
2. 基于GA的布局优化模型
车间布局优化模型如下图所示:
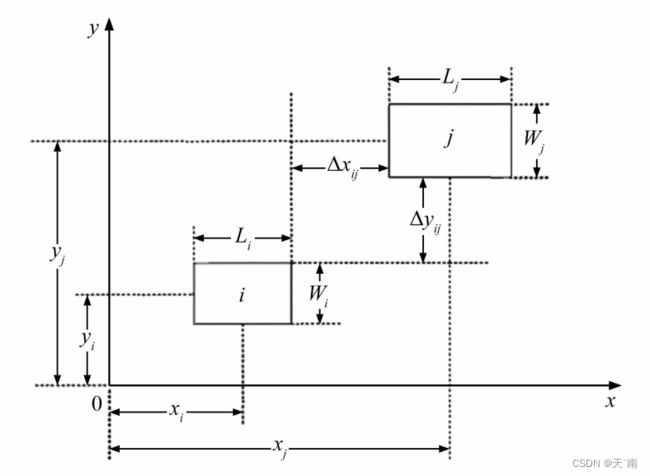
模型目标函数为搬运费用最小化及非物流关系最大化。
假设布置方案为X,i 和 j 为该方案的作业单位,两者距离用 d i j d_{ij} dij表示,搬运量用 f i j f_{ij} fij表示,可得距离矩阵及物流量矩阵,进而求得物料搬运成本表达式如下:
C 1 = ∑ i = 1 m ∑ j = 1 m c i j f i j d i j C_{1}=\sum_{i=1}^{m} \sum_{j=1}^{m} c_{ij}f_{ij}d_{ij} C1=i=1∑mj=1∑mcijfijdij
式中, C 1 C_{1} C1为总搬运成本; c i j c_{ij} cij为各单位之间的搬运成本。非物流关系表达式为:
C 2 = ∑ i = 1 m ∑ j = 1 m T i j b i j C_{2}=\sum_{i=1}^{m} \sum_{j=1}^{m} T_{ij}b_{ij} C2=i=1∑mj=1∑mTijbij
式中, C 2 C_{2} C2为非物流关系总和; T i j T_{ij} Tij为作业单位之间非物流关系的紧密程度。
由此可得两个基本目标,即 C 1 C_{1} C1的最小化和 C 2 C_{2} C2的最大化,从而构建双目标函数如下:
m i n C 1 = ∑ i = 1 m ∑ j = 1 m c i j f i j d i j minC_{1}=\sum_{i=1}^{m} \sum_{j=1}^{m} c_{ij}f_{ij}d_{ij} minC1=i=1∑mj=1∑mcijfijdij
m a x C 2 = ∑ i = 1 m ∑ j = 1 m T i j b i j maxC_{2}=\sum_{i=1}^{m} \sum_{j=1}^{m} T_{ij}b_{ij} maxC2=i=1∑mj=1∑mTijbij
为方便求解,将双目标函数 C 1 C_{1} C1和 C 2 C_{2} C2进行合并,得到单目标函数 C C C表达式如下:
m i n C = ∑ i = 1 m ∑ j = 1 m c i j f i j d i j − ∑ i = 1 m ∑ j = 1 m T i j b i j minC=\sum_{i=1}^{m} \sum_{j=1}^{m} c_{ij}f_{ij}d_{ij}-\sum_{i=1}^{m} \sum_{j=1}^{m} T_{ij}b_{ij} minC=i=1∑mj=1∑mcijfijdij−i=1∑mj=1∑mTijbij
此单目标函数仍需进行标准化处理,并且还需以惩罚函数加以限制,
3. 部分代码展示
%% 物料搬运成本最小化和非物流关系最大化的合并目标函数
function [fit,Z1,Z2] = Fitness(P,LW,D,A,C,T,L,W,big)
dmax = max([L W]);
gap = 3;
%% SECTION TITLE
% DESCRIPTIVE TEXT
K = size(P,1); % 设施数量
%% 计算关联因子
dB = zeros(K);
for i = 1 : K
for j = i + 1 : K
if D(i,j) <= dmax / 6
dB(i,j) = 1;
elseif D(i,j) <= dmax / 3
dB(i,j) = 0.8;
elseif D(i,j) <= dmax / 2
dB(i,j) = 0.6;
elseif D(i,j) <= dmax * 2 / 3
dB(i,j) = 0.4;
elseif D(i,j) <= dmax * 5 / 6
dB(i,j) = 0.2;
else
dB(i,j) = 0;
end
dB(j,i) = dB(i,j);
end
end
%% 目标函数1
Z1 = 0;
for i = 1 : K - 1
for j = i + 1 : K
Z1 = Z1 + C(i,j) * A(i,j) * D(i,j);
end
end
%% 目标函数2
Z2 = 0;
for i = 1 : K - 1
for j = i + 1 : K
Z2 = Z2 + T(i,j) * dB(i,j);
end
end
%% 归化因子计算
u1 = 0;
for i = 1 : K - 1
for j = i + 1 : K
u1 = u1 + C(i,j) * A(i,j) * dmax;
end
end
u1 = 1 / u1;
u2 = 0;
for i = 1 : K - 1
for j = i + 1 : K
u2 = u2 + T(i,j);
end
end
u2 = 1 / u2;
%% 边界约束1
t = 0;
for i = 1 : K
if P(i,1) - LW(i,1) / 2 < gap || P(i,1) + LW(i,1) / 2 > L - gap
t = t + 1; % x方向不满足边界要求
end
if P(i,2) - LW(i,2) / 2 < gap || P(i,2) + LW(i,2) / 2 > W - gap
t = t + 1; % y方向不满足边界要求
end
end
%%
dtag = (D == big);
dtn = sum(sum(dtag));
t = t + dtn;
%% 适应度
w1 = 3 / 4;
w2 = 1 / 4;
fit = w1 * u1 * Z1 - w2 * u2 * Z2 + 10000000000 * t;
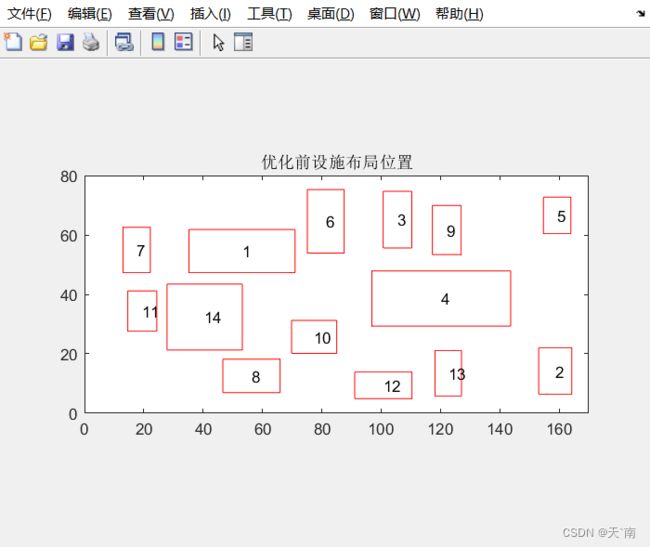
4. 仿真结果展示


5. 资源获取
可以获取完整代码资源。