基于IMX6ULL的AP3216C的QT动态数据曲线图显示
前言:本文为手把手教学 Linux+QT 的典型基础项目 AP3216C 的数据折线图显示,项目使用正点原子的 IMX6ULL 阿尔法( Cortex-A7 系列)开发板。项目需要实现 AP3216C 在 Linux 系统下的驱动,使用 QT 设计 AP3216C 的数据显示页面作为项目的应用层。该项目属于非常简单的入门级项目,核心目的是帮助大家熟悉 Linux 系统下的项目制作和工程研发过程。希望该项目可以帮助大家学会灵活使用 Linux 系统下的传感器开发!(文末有代码开源!)
硬件实物图:
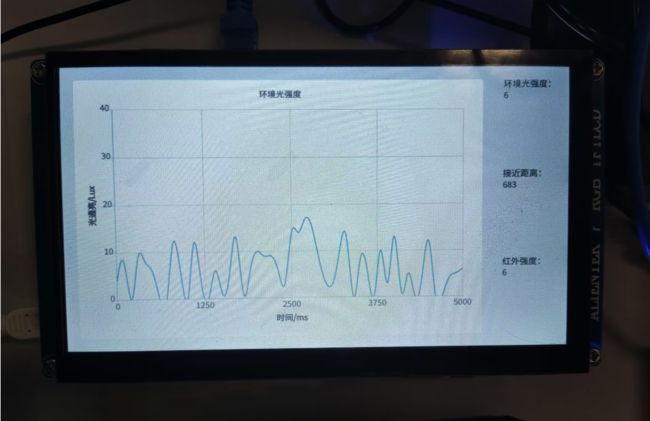

效果图:


本项目核心是教学 Linux+QT 的工程研发流程,如果专注于应用层工程学习的,可以直接使用正点原子提供的 Linux 镜像文件。本教程是适配正点提供的系统镜像的,可以直接使用!
一、AP3216C概述
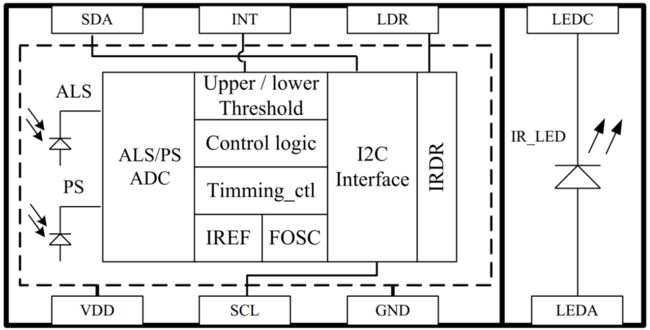
I.MX6U-ALPHA 开发板上通过 I2C1 连接了一个三合一环境传感器:AP3216C,AP3216C 是由敦南科技推出的一款传感器,其支持环境光强度(ALS)、接近距离(PS)和红外线强度(IR)这三个环境参数检测。该芯片可以通过 IIC 接口与主控制相连,并且支持中断,AP3216C 的特点如下:
①、I2C 接口,快速模式下波特率可以到 400Kbit/S
②、多种工作模式选择:ALS、PS+IR、ALS+PS+IR、PD 等等。
③、内建温度补偿电路。
④、宽工作温度范围(-30°C ~ +80°C)。
⑤、超小封装,4.1mm x 2.4mm x 1.35mm
⑥、环境光传感器具有 16 位分辨率。
⑦、接近传感器和红外传感器具有 10 位分辨率。
这个芯片设计的用途是给手机之类的使用,比如:返回当前环境光强以便调整屏幕亮度;用户接听电话时,将手机放置在耳边后,自动关闭屏幕避免用户误触碰 。
二、基于Linux的AP3216C驱动
2.1 AP3216C的设备树
Linux 内核也将 I2C 驱动分为两部分:
①、I2C 总线驱动,I2C 总线驱动就是 SOC 的 I2C 控制器驱动,也叫做 I2C 适配器驱动。
②、I2C 设备驱动,I2C 设备驱动就是针对具体的 I2C 设备而编写的驱动。

2.1.1 IO修改或添加
需要设置 UART4_TXD 和 UART4_RXD 这两个 IO,NXP 其实已经将他这两个 IO 设置好了,打开 imx6ull-alientek-emmc.dts,然后找到如下内容:

pinctrl_i2c1: i2c1grp {
fsl,pins = <
MX6UL_PAD_UART4_TX_DATA__I2C1_SCL 0x4001b8b0
MX6UL_PAD_UART4_RX_DATA__I2C1_SDA 0x4001b8b0
>;
};pinctrl_i2c1 就是 I2C1 的 IO 节点,这里将 UART4_TXD 和 UART4_RXD 这两个 IO 分别复用为 I2C1_SCL 和 I2C1_SDA,电气属性都设置为 0x4001b8b0。
2.1.2 在 i2c1 节点追加 ap3216c 子节点
AP3216C 是连接到 I2C1 上的,因此需要在 i2c1 节点下添加 ap3216c 的设备子节点,在 imx6ull-alientek-emmc.dts 文件中找到 i2c1 节点
&i2c1 {
clock-frequency = <100000>; /* 时钟频率 */
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c1>; /* pinctrl引脚电气属性 */
status = "okay";
ap3216c@1e {
compatible = "alientek,ap3216c";
reg = <0x1e>;
};
};编译设备树,传到开发板上,重启。此时我们系统的I2C设备有:

2.2 AP3216C 驱动编写
下面编写 AP3216 驱动:
ap3216creg.h:
#ifndef AP3216C_H
#define AP3216C_H
/***************************************************************
文件名 : ap3216creg.h
描述 : AP3216C寄存器地址描述头文件
***************************************************************/
#define AP3216C_ADDR 0X1E /* AP3216C器件地址 */
/* AP3316C寄存器 */
#define AP3216C_SYSTEMCONG 0x00 /* 配置寄存器 */
#define AP3216C_INTSTATUS 0X01 /* 中断状态寄存器 */
#define AP3216C_INTCLEAR 0X02 /* 中断清除寄存器 */
#define AP3216C_IRDATALOW 0x0A /* IR数据低字节 */
#define AP3216C_IRDATAHIGH 0x0B /* IR数据高字节 */
#define AP3216C_ALSDATALOW 0x0C /* ALS数据低字节 */
#define AP3216C_ALSDATAHIGH 0X0D /* ALS数据高字节 */
#define AP3216C_PSDATALOW 0X0E /* PS数据低字节 */
#define AP3216C_PSDATAHIGH 0X0F /* PS数据高字节 */
#endifap3216.c:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "ap3216creg.h"
#define AP3216C_CNT 1
#define AP3216C_NAME "ap3216c"
struct ap3216c_dev {
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
struct device_node *nd; /* 设备节点 */
int major; /* 主设备号 */
void *private_data; /* 私有数据 */
unsigned short ir, als, ps; /* 三个光传感器数据 */
};
static struct ap3216c_dev ap3216cdev;
/*
* @description : 从ap3216c读取多个寄存器数据
* @param - dev: ap3216c设备
* @param - reg: 要读取的寄存器首地址
* @param - val: 读取到的数据
* @param - len: 要读取的数据长度
* @return : 操作结果
*/
static int ap3216c_read_regs(struct ap3216c_dev *dev, u8 reg, void *val, int len)
{
int ret;
struct i2c_msg msg[2];
struct i2c_client *client = (struct i2c_client *)dev->private_data;
/* msg[0]为发送要读取的首地址 */
msg[0].addr = client->addr; /* ap3216c地址 */
msg[0].flags = 0; /* 标记为发送数据 */
msg[0].buf = ® /* 读取的首地址 */
msg[0].len = 1; /* reg长度*/
/* msg[1]读取数据 */
msg[1].addr = client->addr; /* ap3216c地址 */
msg[1].flags = I2C_M_RD; /* 标记为读取数据*/
msg[1].buf = val; /* 读取数据缓冲区 */
msg[1].len = len; /* 要读取的数据长度*/
ret = i2c_transfer(client->adapter, msg, 2);
if(ret == 2) {
ret = 0;
} else {
printk("i2c rd failed=%d reg=%06x len=%d\n",ret, reg, len);
ret = -EREMOTEIO;
}
return ret;
}
/*
* @description : 向ap3216c多个寄存器写入数据
* @param - dev: ap3216c设备
* @param - reg: 要写入的寄存器首地址
* @param - val: 要写入的数据缓冲区
* @param - len: 要写入的数据长度
* @return : 操作结果
*/
static s32 ap3216c_write_regs(struct ap3216c_dev *dev, u8 reg, u8 *buf, u8 len)
{
u8 b[256];
struct i2c_msg msg;
struct i2c_client *client = (struct i2c_client *)dev->private_data;
b[0] = reg; /* 寄存器首地址 */
memcpy(&b[1],buf,len); /* 将要写入的数据拷贝到数组b里面 */
msg.addr = client->addr; /* ap3216c地址 */
msg.flags = 0; /* 标记为写数据 */
msg.buf = b; /* 要写入的数据缓冲区 */
msg.len = len + 1; /* 要写入的数据长度 */
return i2c_transfer(client->adapter, &msg, 1);
}
/*
* @description : 读取ap3216c指定寄存器值,读取一个寄存器
* @param - dev: ap3216c设备
* @param - reg: 要读取的寄存器
* @return : 读取到的寄存器值
*/
static unsigned char ap3216c_read_reg(struct ap3216c_dev *dev, u8 reg)
{
u8 data = 0;
ap3216c_read_regs(dev, reg, &data, 1);
return data;
#if 0
struct i2c_client *client = (struct i2c_client *)dev->private_data;
return i2c_smbus_read_byte_data(client, reg);
#endif
}
/*
* @description : 向ap3216c指定寄存器写入指定的值,写一个寄存器
* @param - dev: ap3216c设备
* @param - reg: 要写的寄存器
* @param - data: 要写入的值
* @return : 无
*/
static void ap3216c_write_reg(struct ap3216c_dev *dev, u8 reg, u8 data)
{
u8 buf = 0;
buf = data;
ap3216c_write_regs(dev, reg, &buf, 1);
}
/*
* @description : 读取AP3216C的数据,读取原始数据,包括ALS,PS和IR, 注意!
* : 如果同时打开ALS,IR+PS的话两次数据读取的时间间隔要大于112.5ms
* @param - ir : ir数据
* @param - ps : ps数据
* @param - ps : als数据
* @return : 无。
*/
void ap3216c_readdata(struct ap3216c_dev *dev)
{
unsigned char i =0;
unsigned char buf[6];
/* 循环读取所有传感器数据 */
for(i = 0; i < 6; i++)
{
buf[i] = ap3216c_read_reg(dev, AP3216C_IRDATALOW + i);
}
if(buf[0] & 0X80) /* IR_OF位为1,则数据无效 */
dev->ir = 0;
else /* 读取IR传感器的数据 */
dev->ir = ((unsigned short)buf[1] << 2) | (buf[0] & 0X03);
dev->als = ((unsigned short)buf[3] << 8) | buf[2]; /* 读取ALS传感器的数据 */
if(buf[4] & 0x40) /* IR_OF位为1,则数据无效 */
dev->ps = 0;
else /* 读取PS传感器的数据 */
dev->ps = ((unsigned short)(buf[5] & 0X3F) << 4) | (buf[4] & 0X0F);
}
/*
* @description : 打开设备
* @param - inode : 传递给驱动的inode
* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
* 一般在open的时候将private_data指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int ap3216c_open(struct inode *inode, struct file *filp)
{
filp->private_data = &ap3216cdev;
/* 初始化AP3216C */
ap3216c_write_reg(&ap3216cdev, AP3216C_SYSTEMCONG, 0x04); /* 复位AP3216C */
mdelay(50); /* AP3216C复位最少10ms */
ap3216c_write_reg(&ap3216cdev, AP3216C_SYSTEMCONG, 0X03); /* 开启ALS、PS+IR */
return 0;
}
/*
* @description : 从设备读取数据
* @param - filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static ssize_t ap3216c_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{
short data[3];
long err = 0;
struct ap3216c_dev *dev = (struct ap3216c_dev *)filp->private_data;
ap3216c_readdata(dev);
data[0] = dev->ir;
data[1] = dev->als;
data[2] = dev->ps;
err = copy_to_user(buf, data, sizeof(data));
return 0;
}
/*
* @description : 关闭/释放设备
* @param - filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int ap3216c_release(struct inode *inode, struct file *filp)
{
return 0;
}
/* AP3216C操作函数 */
static const struct file_operations ap3216c_ops = {
.owner = THIS_MODULE,
.open = ap3216c_open,
.read = ap3216c_read,
.release = ap3216c_release,
};
/*
* @description : i2c驱动的probe函数,当驱动与
* 设备匹配以后此函数就会执行
* @param - client : i2c设备
* @param - id : i2c设备ID
* @return : 0,成功;其他负值,失败
*/
static int ap3216c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
/* 1、构建设备号 */
if (ap3216cdev.major) {
ap3216cdev.devid = MKDEV(ap3216cdev.major, 0);
register_chrdev_region(ap3216cdev.devid, AP3216C_CNT, AP3216C_NAME);
} else {
alloc_chrdev_region(&ap3216cdev.devid, 0, AP3216C_CNT, AP3216C_NAME);
ap3216cdev.major = MAJOR(ap3216cdev.devid);
}
/* 2、注册设备 */
cdev_init(&ap3216cdev.cdev, &ap3216c_ops);
cdev_add(&ap3216cdev.cdev, ap3216cdev.devid, AP3216C_CNT);
/* 3、创建类 */
ap3216cdev.class = class_create(THIS_MODULE, AP3216C_NAME);
if (IS_ERR(ap3216cdev.class)) {
return PTR_ERR(ap3216cdev.class);
}
/* 4、创建设备 */
ap3216cdev.device = device_create(ap3216cdev.class, NULL, ap3216cdev.devid, NULL, AP3216C_NAME);
if (IS_ERR(ap3216cdev.device)) {
return PTR_ERR(ap3216cdev.device);
}
ap3216cdev.private_data = client;
return 0;
}
/*
* @description : i2c驱动的remove函数,移除i2c驱动的时候此函数会执行
* @param - client : i2c设备
* @return : 0,成功;其他负值,失败
*/
static int ap3216c_remove(struct i2c_client *client)
{
/* 删除设备 */
cdev_del(&ap3216cdev.cdev);
unregister_chrdev_region(ap3216cdev.devid, AP3216C_CNT);
/* 注销掉类和设备 */
device_destroy(ap3216cdev.class, ap3216cdev.devid);
class_destroy(ap3216cdev.class);
return 0;
}
/* 传统匹配方式ID列表 */
static const struct i2c_device_id ap3216c_id[] = {
{"alientek,ap3216c", 0},
{}
};
/* 设备树匹配列表 */
static const struct of_device_id ap3216c_of_match[] = {
{ .compatible = "alientek,ap3216c" }, /* 需要和设备树下的保持一致 */
{ /* Sentinel */ }
};
/* i2c驱动结构体 */
static struct i2c_driver ap3216c_driver = {
.probe = ap3216c_probe,
.remove = ap3216c_remove,
.driver = { /* 设备树的匹配方法 */
.owner = THIS_MODULE,
.name = "ap3216c",
.of_match_table = ap3216c_of_match,
},
.id_table = ap3216c_id, /* 传统驱动匹配方法 */
};
/*
* @description : 驱动入口函数
* @param : 无
* @return : 无
*/
static int __init ap3216c_init(void)
{
int ret = 0;
ret = i2c_add_driver(&ap3216c_driver);
return ret;
}
/*
* @description : 驱动出口函数
* @param : 无
* @return : 无
*/
static void __exit ap3216c_exit(void)
{
i2c_del_driver(&ap3216c_driver);
}
/* module_i2c_driver(ap3216c_driver) */
module_init(ap3216c_init);
module_exit(ap3216c_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("sneak");
驱动详解可查阅注释及配合上诉的I2C驱动框架的框图及数据手册理解
我们通过 在终端输入 cat 指令可以读取到传感器的数值变量,如下图:

三、AP3216C的QT程序设计
IMX6ULL 的 QT-UI 的部署与实现需要依赖 QT 的很多依赖包,各位读者可以根据实际情况进行移植。或者直接使用正点原子提供的系统镜像!
3.1 Chart表制作
Qt Charts 很方便的绘制我们常见的曲线图、折线图、柱状图和饼状图等图表。不用自己花精力去了解第三方组件的使用了或者开发第三方组件。Qt 的帮助文档里已经有说明 Qt Charts 主要部件的使用方法。需要用到时我们可以查看 Qt 文档就可以了。
本项目中我们需要使用曲线图去展示 AP3216C 的 ALS 光强度属性。
使用一个 QSplineSeries 对象(曲线),一个 QChart(图表),一个 QChartView(图表视图)。首先我们创建坐 chart 图表,然后创建两条坐标轴 axisX 与 axisY。将两条坐标轴添加到 chart 图表上,再将 splineSeries 曲线与坐标轴连系起来。最后再将 chart 图表添加到 chartView 图表视图中。曲线上的数据由系统产生随机数,使用定时器更新数据。
qtchart.pro:
QT += core gui charts
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
CONFIG += c++11
# The following define makes your compiler emit warnings if you use
# any Qt feature that has been marked deprecated (the exact warnings
# depend on your compiler). Please consult the documentation of the
# deprecated API in order to know how to port your code away from it.
DEFINES += QT_DEPRECATED_WARNINGS
# You can also make your code fail to compile if it uses deprecated APIs.
# In order to do so, uncomment the following line.
# You can also select to disable deprecated APIs only up to a certain version of Qt.
#DEFINES += QT_DISABLE_DEPRECATED_BEFORE=0x060000 # disables all the APIs deprecated before Qt 6.0.0
SOURCES += \
main.cpp \
mainwindow.cpp
HEADERS += \
mainwindow.h
FORMS += \
mainwindow.ui
# Default rules for deployment.
qnx: target.path = /tmp/$${TARGET}/bin
else: unix:!android: target.path = /opt/$${TARGET}/bin
!isEmpty(target.path): INSTALLS += targetmainwindow.h:
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include
#include
#include
#include
#include
#include
#include
/* 必需添加命名空间 */
QT_CHARTS_USE_NAMESPACE
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
MainWindow(QWidget *parent = nullptr);
~MainWindow();
private:
/* 接收数据接口 */
void receivedData(int);
/* 数据最大个数 */
int maxSize;
/* x轴上的最大值 */
int maxX;
/* y轴上的最大值 */
int maxY;
/* y轴 */
QValueAxis *axisY;
/* x轴 */
QValueAxis *axisX;
/* QList int类型容器 */
QList data;
/* QSplineSeries对象(曲线)*/
QSplineSeries *splineSeries;
/* QChart图表 */
QChart *chart;
/* 图表视图 */
QChartView *chartView;
/* 定时器 */
QTimer *timer;
private slots:
void timerTimeOut();
};
#endif // MAINWINDOW_H
mainwindow.c:
#include "mainwindow.h"
#include
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent)
{
/* 设置最显示位置与大小 */
this->setGeometry(0, 0, 800, 480);
/* 最大储存maxSize - 1个数据 */
maxSize = 51;
/* x轴上的最大值 */
maxX = 5000;
/* y轴最大值 */
maxY = 40;
/* splineSeries曲线实例化(折线用QLineSeries) */
splineSeries = new QSplineSeries();
/* 图表实例化 */
chart = new QChart();
/* 图表视图实例化 */
chartView = new QChartView();
/* 坐标轴 */
axisY = new QValueAxis();
axisX = new QValueAxis();
/* 定时器 */
timer = new QTimer(this);
/* legend译图例类型,以绘图的颜色区分,本例设置为隐藏 */
chart->legend()->hide();
/* chart设置标题 */
chart->setTitle("实时动态曲线示例");
/* 添加一条曲线splineSeries */
chart->addSeries(splineSeries);
/* 设置显示格式 */
axisY->setLabelFormat("%i");
/* y轴标题 */
axisY->setTitleText("温度/℃");
/* y轴标题位置(设置坐标轴的方向) */
chart->addAxis(axisY, Qt::AlignLeft);
/* 设置y轴范围 */
axisY->setRange(0, maxY);
/* 将splineSeries附加于y轴上 */
splineSeries->attachAxis(axisY);
/* 设置显示格式 */
axisX->setLabelFormat("%i");
/* x轴标题 */
axisX->setTitleText("时间/ms");
/* x轴标题位置(设置坐标轴的方向) */
chart->addAxis(axisX, Qt::AlignBottom);
/* 设置x轴范围 */
axisX->setRange(0, maxX);
/* 将splineSeries附加于x轴上 */
splineSeries->attachAxis(axisX);
/* 将图表的内容设置在图表视图上 */
chartView->setChart(chart);
/* 设置抗锯齿 */
chartView->setRenderHint(QPainter::Antialiasing);
/* 设置为图表视图为中心部件 */
setCentralWidget(chartView);
/* 定时200ms */
timer->start(200);
/* 信号槽连接 */
connect(timer, SIGNAL(timeout()), this, SLOT(timerTimeOut()));
/* 设置随机种子,随机数初始化 */
qsrand(time(NULL));
}
MainWindow::~MainWindow()
{
}
void MainWindow::timerTimeOut()
{
/* 产生随机0~maxY之间的数据 */
receivedData(qrand() % maxY );
}
void MainWindow::receivedData(int value)
{
/* 将数据添加到data中 */
data.append(value);
/* 当储存数据的个数大于最大值时,把第一个数据删除 */
while (data.size() > maxSize) {
/* 移除data中第一个数据 */
data.removeFirst();
}
/* 先清空 */
splineSeries->clear();
/* 计算x轴上的点与点之间显示的间距 */
int xSpace = maxX / (maxSize - 1);
/* 添加点,xSpace * i 表示第i个点的x轴的位置 */
for (int i = 0; i < data.size(); ++i) {
splineSeries->append(xSpace * i, data.at(i));
}
} QT Chart表效果:

3.2 AP3216C的数据读取
我们编写 QT 下的 AP3216C 的应用代码:
ap3216c.h:
#ifndef AP3216C_H
#define AP3216C_H
#include
#include
class Ap3216c : public QObject
{
Q_OBJECT
public:
explicit Ap3216c(QObject *parent = 0); //构造函数声明,"explicit"是一个C++关键字,用于修饰构造函数或函数,以禁止隐式转换
~Ap3216c(); //析构函数
Q_INVOKABLE void setCapture(bool str); //Q_INVOKABLE是一个宏,setCapture函数接受一个bool类型的参数str,用于设置某个对象的捕获状态
QString alsData(); //光强传感器( ALS: Ambient Light Sensor)
QString psData(); //接近传感器( PS: Proximity Sensor)
QString irData(); //红外 LED( IR LED)
private:
QTimer *timer; //定时器timer
QString alsdata; //光强数据
QString psdata; //接近数据
QString irdata; //红外数据
QString readAlsData(); //读取Ais数据
QString readPsData(); //读取Ps数据
QString readIrData(); //读取IR数据
Q_PROPERTY(QString alsData READ alsData NOTIFY ap3216cDataChanged)
Q_PROPERTY(QString psData READ psData NOTIFY ap3216cDataChanged)
Q_PROPERTY(QString irData READ irData NOTIFY ap3216cDataChanged)
/*Q_PROPERTY:这是一个宏,用于在类中声明属性。
*QString:alsData是属性的类型,这里是一个QString类型的变量。
*READ alsData:这表示该属性可以通过"alsData"方法进行读取。
*NOTIFY ap3216cDataChanged:这表示当该属性发生变化时,会发出"ap3216cDataChanged"信号
*/
public slots:
void timer_timeout();
signals:
void ap3216cDataChanged();
};
#endif // AP3216C_H
ap3216c.c:
#include "ap3216c.h"
#include
#include
#include
#include
#include
#include
#include
/* AP3216C的构造函数 */
Ap3216c::Ap3216c(QObject *parent) : QObject (parent)
{
timer = new QTimer(); //定义一个定时器容器
connect(timer, SIGNAL(timeout()),this,SLOT(timer_timeout())); //将超时信号,与timer_timeout链接起来
}
/* 析构函数 */
Ap3216c::~Ap3216c()
{
}
/* 超时函数 */
void Ap3216c::timer_timeout()
{
alsdata = readAlsData();
psdata = readPsData();
irdata = readIrData();
emit ap3216cDataChanged(); //发送ap3216c数值变化信息
}
QString Ap3216c::readIrData()
{
char const *filename = "/sys/class/misc/ap3216c/ir";
int err = 0;
int fd;
char buf[10];
fd = open(filename,O_RDONLY); //只读模式打开文件
if(fd < 0){
close(fd);
return "open file error!";
}
err = read(fd,buf,sizeof(buf));
if(err < 0){
close(fd);
return "read data error!";
}
close(fd);
QString irValue = buf;
QStringList list = irValue.split("\n"); //将irValue按照换行符"\n"分割成一个字符串列表,并将结果存储在list对象中
return list[0];
}
QString Ap3216c::readPsData()
{
char const *filename = "/sys/class/misc/ap3216c/ps";
int err = 0;
int fd;
char buf[10];
fd = open(filename,O_RDONLY); //只读模式打开文件
if(fd < 0){
close(fd);
return "open file error!";
}
err = read(fd,buf,sizeof(buf));
if(err < 0){
close(fd);
return "read data error!";
}
close(fd);
QString irValue = buf;
QStringList list = irValue.split("\n"); //将irValue按照换行符"\n"分割成一个字符串列表,并将结果存储在list对象中
return list[0];
}
QString Ap3216c::readAlsData()
{
char const *filename = "/sys/class/misc/ap3216c/als";
int err = 0;
int fd;
char buf[10];
fd = open(filename,O_RDONLY); //只读模式打开文件
if(fd < 0){
close(fd);
return "open file error!";
}
err = read(fd,buf,sizeof(buf));
if(err < 0){
close(fd);
return "read data error!";
}
close(fd);
QString irValue = buf;
QStringList list = irValue.split("\n"); //将irValue按照换行符"\n"分割成一个字符串列表,并将结果存储在list对象中
return list[0];
}
QString Ap3216c::alsData()
{
return alsdata;
}
QString Ap3216c::irData()
{
return irdata;
}
QString Ap3216c::psData()
{
return psdata;
}
void Ap3216c::setCapture(bool str)
{
if(str)
timer->start(500);
else
timer->stop();
} “Linux 系统之下一切皆文件”,上述代码就是通过 C 语言库函数去读取系统下的属性数值信息来做到获取 AP3216C 的数据值!

3.3 AP3216C与Chart联动
我们将 AP3216C 与 Chart 进行联动配合,通过 Chart 实时读取显示 AP3216C 的 ALS 属性。
mainwindow.h:
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "ap3216c.h"
/* 必需添加命名空间 */
QT_CHARTS_USE_NAMESPACE
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
MainWindow(QWidget *parent = nullptr);
~MainWindow();
private:
/* 主容器,Widget也可以当作一种容器 */
QWidget *mainWidget;
/* 界面水平区域布局 */
QHBoxLayout *hboxLayout[2];
/* 界面右侧区域布局 */
QVBoxLayout *vboxLayout[4];
/* 界面右侧区域容器 */
QWidget *rightWidget;
/* 用一个 QLabel 对象用于显示字符串 */
QLabel *labelString;
/* 容器作用,用于布局 */
QWidget *widget[5];
/* 标签文本 */
QLabel *label[3];
/* 数据标签 */
QLabel *my_label[3];
/* 数据最大个数 */
int maxSize;
/* x轴上的最大值 */
int maxX;
/* y轴上的最大值 */
int maxY;
/* y轴 */
QValueAxis *axisY;
/* x轴 */
QValueAxis *axisX;
/* QList int类型容器 */
QList data;
/* QSplineSeries对象(曲线)*/
QSplineSeries *splineSeries;
/* QChart图表 */
QChart *chart;
/* 图表视图 */
QChartView *chartView;
/* ii2传感器类 */
Ap3216c *ap3216c;
/* 接收数据接口 */
void receivedData(int);
/* 布局初始化 */
void layoutInit();
private slots:
/* 获取ap3216传感器数据 */
void getAp3216cData();
};
#endif // MAINWINDOW_H
mainwindow.c:
#include "mainwindow.h"
#include "ui_mainwindow.h"
#include
#include
#include
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent)
{
/* 布局初始化 */
layoutInit();
}
MainWindow::~MainWindow()
{
}
/* 布局初始化 */
void MainWindow::layoutInit()
{
/* 获取屏幕的分辨率,Qt官方建议使用这
* 种方法获取屏幕分辨率,防上多屏设备导致对应不上
* 注意,这是获取整个桌面系统的分辨率
*/
QList list_screen = QGuiApplication::screens();
/* 如果是ARM平台,直接设置大小为屏幕的大小 */
#if __arm__
/* 重设大小 */
this->resize(list_screen.at(0)->geometry().width(),
list_screen.at(0)->geometry().height());
#else
/* 否则则设置主窗体大小为800x480 */
this->resize(800,400);
#endif
/* 实例化与布局,常规操作 */
mainWidget = new QWidget();
rightWidget = new QWidget();
for(int i = 0; i < 2; i++) //水平布局
hboxLayout[i] = new QHBoxLayout();
for(int i = 0; i < 5; i++) //容器布局
widget[i] = new QWidget();
for(int i = 0; i < 4; i++) //垂直布局
vboxLayout[i] = new QVBoxLayout();
for(int i = 0; i < 3; i++) //数据变量
my_label[i] = new QLabel();
/********************** chart表格 *****************************/
/* 最大储存maxSize - 1个数据 */
maxSize = 51;
/* x轴上的最大值 */
maxX = 5000;
/* y轴最大值 */
maxY = 40;
/* splineSeries曲线实例化(折线用QLineSeries) */
splineSeries = new QSplineSeries();
/* 图表实例化 */
chart = new QChart();
/* 图表视图实例化 */
chartView = new QChartView();
/* 坐标轴 */
axisY = new QValueAxis();
axisX = new QValueAxis();
/* legend译图例类型,以绘图的颜色区分,本例设置为隐藏 */
chart->legend()->hide();
/* chart设置标题 */
chart->setTitle("环境光强度");
/* 添加一条曲线splineSeries */
chart->addSeries(splineSeries);
/* 设置显示格式 */
axisY->setLabelFormat("%i");
/* y轴标题 */
axisY->setTitleText("光通亮/Lux");
/* y轴标题位置(设置坐标轴的方向) */
chart->addAxis(axisY, Qt::AlignLeft);
/* 设置y轴范围 */
axisY->setRange(0, maxY);
/* 将splineSeries附加于y轴上 */
splineSeries->attachAxis(axisY);
/* 设置显示格式 */
axisX->setLabelFormat("%i");
/* x轴标题 */
axisX->setTitleText("时间/ms");
/* x轴标题位置(设置坐标轴的方向) */
chart->addAxis(axisX, Qt::AlignBottom);
/* 设置x轴范围 */
axisX->setRange(0, maxX);
/* 将splineSeries附加于x轴上 */
splineSeries->attachAxis(axisX);
/* 将图表的内容设置在图表视图上 */
chartView->setChart(chart);
/* 设置抗锯齿 */
chartView->setRenderHint(QPainter::Antialiasing);
/********************** chart表格 *****************************/
/* 设置传感器数据标签 */
QFont font;
font.setPixelSize(18);
QPalette pal;
pal.setColor(QPalette::WindowText, Qt::black);
QStringList list;
list<<"环境光强度:"<<"接近距离:"<<"红外强度:";
for (int i = 0; i < 3; i++) {
label[i] = new QLabel();
label[i]->setText(list[i]);
label[i]->setFont(font);
label[i]->setPalette(pal);
label[i]->adjustSize();
}
/* 垂直容器布局 */
vboxLayout[3]->addWidget(widget[0]);
vboxLayout[3]->addWidget(widget[1]);
vboxLayout[3]->addWidget(widget[2]);
hboxLayout[0]->addWidget(chartView); //将chart表格添加到水平布局中
widget[3]->setLayout(hboxLayout[0]);
widget[4]->setLayout(vboxLayout[3]);
hboxLayout[1]->addWidget(widget[3]);
hboxLayout[1]->addWidget(widget[4]);
mainWidget->setLayout(hboxLayout[1]);
this->setCentralWidget(mainWidget);
/* als布局 */
vboxLayout[0]->addWidget(label[0]);
vboxLayout[0]->addWidget(my_label[0]);
vboxLayout[0]->setAlignment(Qt::AlignTop | Qt::AlignVCenter);
widget[0]->setLayout(vboxLayout[0]);
/* ps布局 */
vboxLayout[1]->addWidget(label[1]);
vboxLayout[1]->addWidget(my_label[1]);
vboxLayout[1]->setAlignment(Qt::AlignTop | Qt::AlignVCenter);
widget[1]->setLayout(vboxLayout[1]);
/* ir布局 */
vboxLayout[2]->addWidget(label[2]);
vboxLayout[2]->addWidget(my_label[2]);
vboxLayout[2]->setAlignment(Qt::AlignTop | Qt::AlignVCenter);
widget[2]->setLayout(vboxLayout[2]);
ap3216c = new Ap3216c(this);
/* 只能在开发板上开启获取数据,Ubuntu上是没有ap3216c传感器的 */
#if __arm__
ap3216c->setCapture(true);
#endif
connect(ap3216c,SIGNAL(ap3216cDataChanged()),this,SLOT(getAp3216cData()));
}
void MainWindow::getAp3216cData()
{
static QString als = ap3216c->alsData();
// if (als != ap3216c->alsData()) {
// als = ap3216c->alsData();
// }
als = ap3216c->alsData();
static QString ps = ap3216c->psData();
// if (ps != ap3216c->psData()) {
// ps = ap3216c->psData();
// }
ps = ap3216c->psData();
static QString ir = ap3216c->irData();
// if (ir != ap3216c->irData()) {
// ir = ap3216c->irData();
// }
ir = ap3216c->irData();
my_label[0]->setText(als);
my_label[1]->setText(ps);
my_label[2]->setText(ir);
/**************** chart表数据 ******************/
int num = als.toInt(); //字符串转int类型数据
/* 将数据添加到data中 */
data.append(num);
/* 当储存数据的个数大于最大值时,把第一个数据删除 */
while (data.size() > maxSize) {
/* 移除data中第一个数据 */
data.removeFirst();
}
/* 先清空 */
splineSeries->clear();
/* 计算x轴上的点与点之间显示的间距 */
int xSpace = maxX / (maxSize - 1);
/* 添加点,xSpace * i 表示第i个点的x轴的位置 */
for (int i = 0; i < data.size(); ++i) {
splineSeries->append(xSpace * i, data.at(i));
}
}
AP3216C 与 Chart 联动的程序主要是进行 QT 的容器布局,通过 layoutInit() 函数进行布局初始化(UI设计部分),之后通过定时 timer 去定时读取 ap3216c 的传感器数据,在读取 ap3216c 的数据之后,通过 Chart 进行绘制出来!
实际项目:

四、项目效果
AP3216C+QT+Chart
五、项目代码
代码地址:基于IMX6ULL的AP3216C的QT动态数据曲线图显示代码资源-CSDN文库
如果积分不够的朋友,点波关注,评论区留下邮箱,作者无偿提供源码和后续问题解答。求求啦关注一波吧 !!!