jetson nano: python调用yolov5-v6.0的tensorrt加速的c++代码,推理速度稳定在12fps,显存占用在0.8G以内
目录
-
-
-
- 1. 问题
- 2. 准备
-
- 2.1. 下载yolov5-v6.0和Yolov5_Tensorrt_Win10源码
- 2.2. 编译Yolov5_Tensorrt_Win10
- 2.3. 生成engine文件
- 3. python调用c++代码
- 4. 报错相关
-
-
1. 问题
tensorrtx项目的yolov5-v4.0版本提供了python脚本yolov5-trt.py,但是该脚本在jetson nano上运行,发现显存占用非常大,导致后面报出killed的错误,使用c++脚本则无此类错误。
通过查看yolov5-trt.py脚本的内容,发现该脚本并非调用c++代码,而是用python环境的torch、pycuda、tensorrt等重新做一遍,导致显存占用比单纯用pytorch还要大。
因此,尝试用python调用写好的c++代码。
主要参考博客《YOLOv5 Tensorrt Python/C++部署》,该博客主要介绍项目Yolov5_Tensorrt_Win10,即win系统上yolov5-v6.0的tensorrt加速部署,原作者提供jetson上部署的方法,需做些修改方能使用。
我的基础环境:
- jetpack 4.5 (L4T 32.5.0)
- cuda 10.2
- cudnn 8.0
- python环境 python 3.6
- tensorrt 7.1.3
- opencv 4.1.1
2. 准备
2.1. 下载yolov5-v6.0和Yolov5_Tensorrt_Win10源码
git clone -b v6.0 http://github.com/ultralytics/yolov5.git
git clone https://gitcode.net/mirrors/Monday-Leo/yolov5_tensorrt_win10.git
yolov5-v6.0的权重下载地址:
https://github.com/ultralytics/yolov5/releases/download/v6.0/yolov5s.pt
2.2. 编译Yolov5_Tensorrt_Win10
首先删除Include目录
cd yolov5_tensorrt_win10
rm -r include
其次,修改cmakelists.txt,如下
mv CMakeLists.txt CMakeLists_win.txt # 默认的CMakeLists.txt是win上的
vim CMakeLists.txt # 新建CMakeLists.txt
在新的CMakeLists.txt填充如下内容,然后保存。
cmake_minimum_required(VERSION 2.6)
project(yolov5)
add_definitions(-std=c++11)
add_definitions(-DAPI_EXPORTS)
option(CUDA_USE_STATIC_CUDA_RUNTIME OFF)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_BUILD_TYPE Debug)
find_package(CUDA REQUIRED)
if(WIN32)
enable_language(CUDA)
endif(WIN32)
include_directories(${PROJECT_SOURCE_DIR}/include)
# include and link dirs of cuda and tensorrt, you need adapt them if yours are different
# cuda
include_directories(/usr/local/cuda/include)
link_directories(/usr/local/cuda/lib64)
# tensorrt
include_directories(/usr/include/x86_64-linux-gnu/)
link_directories(/usr/lib/x86_64-linux-gnu/)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11 -Wall -Ofast -g -Wfatal-errors -D_MWAITXINTRIN_H_INCLUDED")
#cuda_add_library(myplugins SHARED yololayer.cu)
cuda_add_library(myplugins SHARED ${PROJECT_SOURCE_DIR}/yolov5.cpp ${PROJECT_SOURCE_DIR}/yololayer.cu ${PROJECT_SOURCE_DIR}/yololayer.h ${PROJECT_SOURCE_DIR}/preprocess.cu )
find_package(OpenCV)
include_directories(${OpenCV_INCLUDE_DIRS})
target_link_libraries(myplugins nvinfer cudart ${OpenCV_LIBS})
cuda_add_executable(yolov5 calibrator.cpp yolov5.cpp preprocess.cu)
#cuda_add_library(myplugins SHARED ${PROJECT_SOURCE_DIR}/yolov5.cpp ${PROJECT_SOURCE_DIR}/yololayer.cu ${PROJECT_SOURCE_DIR}/yololayer.h ${PROJECT_SOURCE_DIR}/preprocess.cu)
target_link_libraries(yolov5 nvinfer)
target_link_libraries(yolov5 cudart)
target_link_libraries(yolov5 myplugins)
target_link_libraries(yolov5 ${OpenCV_LIBS})
if(UNIX)
add_definitions(-O2 -pthread)
endif(UNIX)
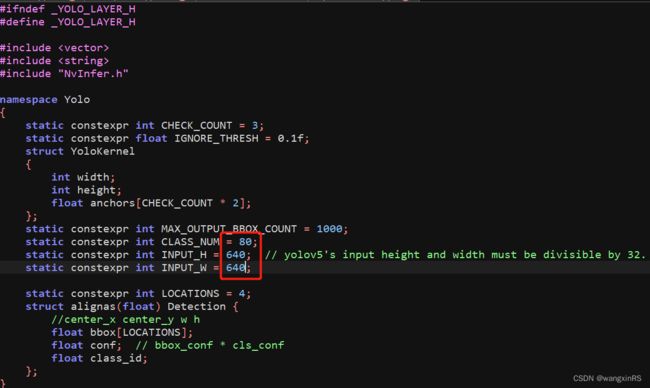
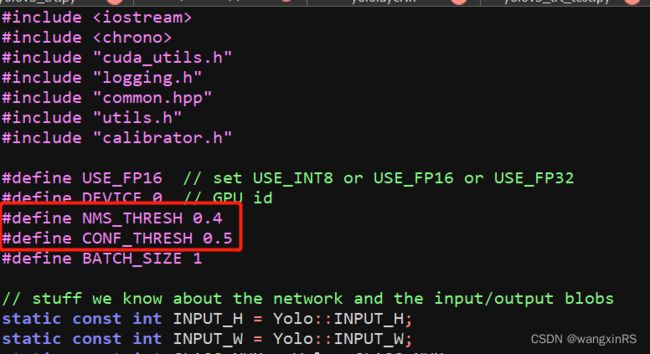
如果模型是自己训练的,就要根据自己的情况修改yololayer.h和yolov5.cpp,通常是修改输入图片宽高以及类别,如
然后执行
mkdir build
cd build
cmake ..
make (没有权限的用sudo make)
结束后在build目录下存在libmyplugins.so第三方库和名为yolov5的可执行文件,如下
![]()
2.3. 生成engine文件
- 生成.wts文件
将Yolov5_Tensorrt_Win10中的gen_wts.py复制到yolov5项目目录下,在终端中执行
python3 gen_wts.py -w yolov5s.pt -o yolov5s.wts
-w:训练好的yolov5模型的路径
-o:输出的 .wts 文件路径
备注:这里可能会出现下载.ttf文件,可根据下载地址自行下载,然后根据提示内容放置到对应位置
- 生成engine文件
将上一步生成的.wts文件放入Yolov5_Tensorrt_Win10/build/目录下,在终端中执行
sudo ./yolov5 -s [.wts] [.engine] [n/s/m/l/x/n6/s6/m6/l6/x6 or c/c6 gd gw]
以yolov5s模型为例:
sudo ./yolov5 -s yolov5s.wts yolov5s.engine s
此时在build目录中出现yolov5s.engine文件,如下,
![]()
3. python调用c++代码
注意:yolv5s.engine和libmyplugins.so均在build目录下。
在Yolov5_Tensorrt_Win10目录下新建python_trt_test.py,脚本内容如下
from ctypes import *
import cv2
import numpy as np
import numpy.ctypeslib as npct
import os
import time
class Detector():
def __init__(self,model_path,dll_path):
self.yolov5 = CDLL(dll_path)
self.yolov5.Detect.argtypes = [c_void_p,c_int,c_int,POINTER(c_ubyte),npct.ndpointer(dtype = np.float32, ndim = 2, shape = (50, 6), flags="C_CONTIGUOUS")]
self.yolov5.Init.restype = c_void_p
self.yolov5.Init.argtypes = [c_void_p]
self.yolov5.cuda_free.argtypes = [c_void_p]
self.c_point = self.yolov5.Init(model_path)
def predict(self,img):
rows, cols = img.shape[0], img.shape[1]
res_arr = np.zeros((50,6),dtype=np.float32)
self.yolov5.Detect(self.c_point,c_int(rows), c_int(cols), img.ctypes.data_as(POINTER(c_ubyte)),res_arr)
self.bbox_array = res_arr[~(res_arr==0).all(1)]
return self.bbox_array
def free(self):
self.yolov5.cuda_free(self.c_point)
def visualize(img,bbox_array):
for temp in bbox_array:
bbox = [temp[0],temp[1],temp[2],temp[3]] #xywh
clas = int(temp[4])
score = temp[5]
cv2.rectangle(img,(int(temp[0]),int(temp[1])),(int(temp[0]+temp[2]),int(temp[1]+temp[3])), (105, 237, 249), 2)
img = cv2.putText(img, "class:"+str(clas)+" "+str(round(score,2)), (int(temp[0]),int(temp[1])-5), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (105, 237, 249), 1)
return img
det = Detector(model_path=b"./build/yolov5s.engine",dll_path="./build/libmyplugins.so") # b'' is needed
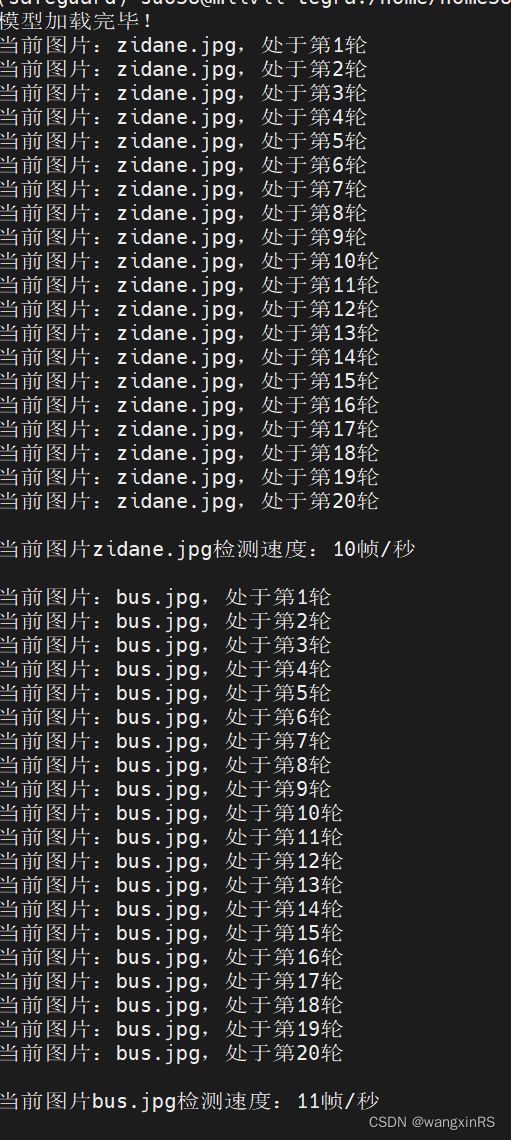
print("模型加载完毕!")
# 当前目录
curpath = os.path.dirname(os.path.abspath(__file__))
for pic in os.listdir(os.path.join(curpath, 'pictures')):
curtime = time.time()
img = cv2.imread(os.path.join(curpath, 'pictures', pic))
for i in range(20):
print("当前图片:{},处于第{}轮".format(pic, i+1))
result = det.predict(img)
print("\n当前图片{}检测速度:{}帧/秒\n".format(pic, int(1 / ((time.time() - curtime) / 20))))
img = visualize(img,result)
det.free()
执行python python_trt_test.py,即可出现
完整代码链接:
链接:https://pan.baidu.com/s/1sYbkbtCnF4ivwWsCU0TWXQ
提取码:36cb
4. 报错相关
- opencv2:No such file or directory
fatal error: opencv2/opencv.hpp: No such file or directory #include <opencv2/opencv.hpp>
解决办法:
这是因为opencv头文件的路径中多了一个opencv4的文件夹:/usr/include/opencv4/opencv2,可以将opencv2文件夹链接到include文件夹下
sudo ln -s /usr/include/opencv4/opencv2 /usr/include/
- nvcc
执行vim ~/.bashrc,在文件最后面添加下列内容,保存后执行source ~/.bashrc
export PATH=/usr/local/cuda-10.2/bin${PATH:+:${PATH}}
export LD_LIBRARY_PATH=/usr/local/cuda-10.2/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export CUDA_ROOT=/usr/local/cuda