ADS-B原理及ADS-B OUT功能验证测试概述
ADS-B原理及ADS-B OUT功能验证测试概述
1、ADS-B技术简介
广播式自动相关监视(ADS-B)是国际民航组织(ICAO)为了未来航空运输发展的需要,以卫星技术、数据通信技术和计算机技术为基础提出的一种监视技术,ADS-B系统以先进的地空/空空数据链为通信手段,以GPS导航系统及其他机载设备产生的信息为数据源,实时地、自发地、间歇性地对外广播自身的状态参数(包括飞机编码、三维位置、速度矢量、飞行意图等),在地面用数据链接收设备可直接监视空中目标;在空中,相邻运行的飞机通过相互侦听邻近广播(不是相互探测和问讯)就能实现对周围空域交通状况全面、详细地了解。ADS-B技术能以低成本实现飞行中航空器之间的相互监视和优于雷达间隔标准的虚拟雷达管制服务。
ADS-B依靠空中每架飞机自动广播自身位置报告,并接收临近飞机位置报告,互相了解对方所处位置和行踪,驾驶员自主地承担维护着空中交通间隔的责任,从而不再依赖地面雷达监视和管制。
2、ADS-B原理
ADS-B是飞机定期的传送其状态向量和其它信息的一种功能。ADS-B包含了以下几层含义:自动(Automatic):全天候运行,无需人值守;相关(Dependent):它只需要依赖于GNSS定位数据;监视(Surveillance):提供类似于且优于雷达监视的服务,获得飞机位置、高度、速度、航向、识别号和其它信息;广播(Broadcast):无需应答机,在适当的传输范围内,飞机之间或与地面站之间采用广播方式互相发送数据。所有装备ADS-B设备的用户都可以接收和处理这些数据。
ADS-B技术原理图
根据飞机信息传递的方向,ADS-B技术的应用可以划分为发送(ADS-B OUT)和接受(ADS-B IN)两类:
2.1、ADS-B OUT
ADS-B OUT是指飞机ADS-B发射机以一定的周期向其它飞机或地面空中管制员发送飞机的位置信息和其它附加信息,包括飞机识别信息、位置、高度、速度、方向和爬升率。OUT是机载ADS-B设备的基本功能。地面站通过接收飞机机载ADS-B设备发送的OUT信息,监视空中交通状况信息,起到类似于雷达监视且优于雷达监视的功能。
2.2、ADS-B IN
ADS-B IN是指飞机ADS-B接收机接受来自其它飞机ADS-B OUT信息或ADS-B地面站设备发送的信息,其功能原理如图所示:
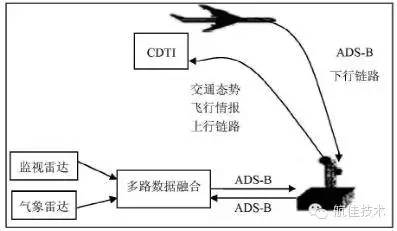
ADS-B IN 功能原理图
ADS-B IN可使飞行员在CDTI(驾驶舱交通信息显示器)上“看到”其它飞机的运行状况,有利于实施见到后避让的原则,从而有效提高机组的空中交通情景意识,使飞行更加安全和高效率。
ADS-B地面站也可以向飞机发送相关的信息,可以分为两类信息:空中交通信息服务广播(TIS-B:Traffic Information Service Broadcas)信息和飞行信息服务广播(FIS-B:Flight Information Service Broadcat)信息。
3、机载系统组成
ADS-B监视系统的机载系统一般包括3部分:GNSS接收系统,数据链系统,实现ADS-B IN功能所需要的驾驶舱交通信息显示器
3.1GNSS系统
ADS-B系统采用的航空器位置信息理论上可以来自飞行管理系统(FMS)、惯性基准系统(INS/IRS)和GNSS(全球卫星导航系统),但目前成熟的产品和技术规范都将GNSS作为唯一的位置信息来源。所以GNSS是ADS-B机载设备的一个重要组成部分。GNSS直接关系着ADS-B定位准确性和可信性。如果GNSS失效,ADS-B将无法提供航空器位置。目前基本使用美国的GPS系统。ADS-B对GNSS的完好性提出了明确要求,所有接收机都要求具有接收机自出完好监视功能,在新的技术规范中要求在电文报告中包含GNSS完好性参数。
3.2数据链系统
地—空之间传递数据的载体——地—空数据链是ADS-B技术重要的组成部分。它很大程度上影响着相关机载和地面设备的所需通信性能。当前的地—空数据链类型主要有以下三种:
甚高频数据链模式(VDL 4 Mode)
通用访问收发机数据链(UAT)
1090MHz S模式扩展电文数据链(1090ES)
这三种数据链都能满足当前ADS-B应用的基本要求,但在具体细节上都不甚完美。由于欧洲和美国两大商用飞机制造基地的产品标准不同,在选用地—空数据链时,由于兼容现有机载设备、兼顾终极发展目标的考虑、政策取向也各有侧重。UAT方式的ADS-B技术,机载设备加装简单,成本低、重量轻,工作频率在DME设备的边界频率978MHz,避免了1090ES方式下与二次雷达都使用1090MHz会造成链路的堵塞。2006年中国民航总局制定了关于ADS-B的技术政策,计划指出考虑到我国未来空管系统与国际国际接轨问题及在全球范围内的相互操作性,在我国实施ADS-B项目计划时优先考虑使用1090ES作为数据链路技术。
3.3驾驶舱交通信息显示器(CDTI)
ADS-B信息的处理和应用过程,是一种采用先进的处理技术和计算机算法,使ADS-B信息得到充分的利用,从而为用户提供更良好的服务。ADS-B的信息处理主要包括位置信息和其它附加信息处理及有效算法,并且形成清晰、直观的背景地图和航迹、交通态势分布、参数窗口以及报文窗口等,最后以伪雷达画面实时地提供给用户。
机载显示时常用的为CDTI,可以为飞行员提供临近交通状况。CDTI最小系统可以仅仅只提供临近ADS-B系统参与者的相对位置和速度矢量。高级CDTI可以为飞行员提供比如飞行曲线、早期报警等信息、它可以:1)提供目标识别辅助,为飞行员常用的“看得见的避让”操作提供必要信息;2)增强交通态势告警,当所有临近飞机都装备ADS-B发射机时候,CDTI可以作为一种全局态势告警工具,同时也是将来所谓自由飞行的一个关键。
3.4机载设备配置
如果只要求具有ADS-B OUT功能,则需要两个主要电子设备:
(1)GNSS接收机(机载的GPS接收机);
(2)S模式1090ES应答机(对现有的ATC应答机升级软件/硬件)。
具备ADS-B OUT和IN功能的综合ADS-B收发系统需要4个主要电子设备:
GNSS接收机;
S模式1090ES应答机;
1090ES接收机。目前,用来接收并解码1090MHz信息的电子设备安装在TCAS接收机上。未来,根据性能要求,ADS-B IN接收机也可能安装在飞机其它组件上;
CDTI:根据飞机设备认证要求,CDTI可以是驾驶舱的一个固定或组合部分,也可以是便携式设备。
4、1090ES数据链系统
4.1原理
1090ES数据链系统能够提供高达1MBits/s的数据传输带宽,且在原S模式应答机基础上,只需做少量改动(升级应答机软件以及加装GPS与应答机之间连线)就能升级为ADS-B系统,是ICAO唯一推荐的标准。
1090ES是基于S模式应答机的一种技术。其下行频率是1090MHz。1090ES传送不同的信息,包括24bit码,高度,代码等。由于消息格式简单,信息承载能力较弱,所以在一个编码中只能传输一个特定类型的信息。而这些信息的更新率也有所不同,位置信息和速度信息每0.4~0.6秒更新一次,标示信息和类型信息每4.8~5.2秒更新一次,趋势改变信息每1.6~1.8秒更新一次。
1090ES信息接收单元收到来自空中单元的位置、速度、识别等信息,通过报告汇总生成单元形成标准的ADS-B报告(包括位置报告、识别报告和速度报告),并以脉冲位置编码的数据格式发送至ADS-B数据用户。
1090ES ADS—B系统主要由外部的输入数据源、1090ES ADS-B OUT数据发射子系统、1090ES ADS-B OUT数据接收子系统以及输出数据客户应用4部分组成。数据发射子系统可将本机的位置、速度、高度、代码等信息自动广播出去,数据接收子系统可接受并在综合综合监控上显示来自其它飞机的位置、速度、高度、代码等信息,从而对周边空域的交通状况有全面、详细的了解,实现飞机间的空—空监视。
1090ES ADS-B系统功能框图
4.2 消息格式
1090ES信号格式
1090ES信号格式与S模式应答机发射信号格式雷同,其脉冲调制信号由前同步脉冲和数据脉冲组成。前同步脉冲由起始的8μs内两组0.5μs宽的脉冲对组成。数据脉冲是脉位调制的,其脉冲位置随调制信息的二进制数而变化,所有脉冲幅度和宽度不变。每位1μs间隔的前半周0.5μs内有脉冲时,逻辑电平为1;每位的后半周0.5μs内有脉冲时,逻辑电平为0。
1090ES DF17格式任务字段及位分配
DF17格式的扩展断续震荡信号为地面和机载监视系统提供相关的飞机信息,如飞机的位置、速度、高度、航向、飞机代码、飞机状态信息以及24比特S模式地址码等。S模式应答机接受来自GPS接收机的导航信息,组合成适于S模式应答机传输的报文格式,并以特定的速率通过ATC天线将DF17格式的扩展断续震荡信号自动地广播出去,以使地面和其它飞机都能够侦听到这些信息,并对其进行译码、纠错、报文相关等处理,从而可以获取这架飞机的飞行轨迹和飞行状态,实现完整的空地—地空监视功能。
与应答机应答二次雷达的询问一样,DF17格式的扩展断续信号用一个1090MHz的载波频率进行调制并以1Mbps数据速率广播脉冲,扩展断续震荡脉冲的长度为112bit。
DF17格式的112bit扩展断续震荡信号共有5个任务字段。其中DF格式的长度为5 bit,主要用于识别扩展断续震荡的内容,此字段设置为固定值17(二进制数表示)。下一个字段是3 bit的应答机能力(CA)字段,它描述了飞机的S模式数据链能力。广播地址(AA)字段用于识别每个飞机独一无二的24 bit的S模式地址。56 bit的扩展型断续震荡报文(ME)字段主要用于传输ADS—B信息,它为飞机提供参数如GPS位置和速度提供报文有效信息。最后,24bit的奇偶性(PI)字段为扩展信断续震荡信号提供奇偶以及CRC校验信息,用于实现CRC纠错。在DF17格式的扩展断续震荡信号中,PI字段通常设置为全0。