【C++】 pcl库中的CropHull滤波和凸包算法(convex hull)
【C++】 pcl库中的CropHull滤波和凸包算法(convex hull)
- 部分参考来源
- 凸包算法解决什么问题
- 穷举法
- 分治法
- Jarvis步进法
- Graham扫描法
- GropHull任意多边形内部点云提取
- 结语
部分参考来源
https://www.cnblogs.com/dream-it-possible/p/8514706.html
凸包算法解决什么问题
凸包(Convex Hull)是一个计算几何(图形学)中的概念。
在一个实数向量空间 V V V中,对于给定集合 X X X,所有包含 X X X的凸集的交集 S S S被称为 X X X的凸包。 X X X的凸包可以用 X X X内所有点 ( X 1 , . . . X n ) (X_1, ...X_n) (X1,...Xn)的凸组合来构造。
在二维欧几里得空间中,凸包可想象为一条刚好包着所有点的橡皮圈。
用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中所有的点。
凸包问题:给定点集,求构成凸包的点
穷举法
- 时间复杂度:O(n³)。
- 思路:两点确定一条直线,如果剩余的其它点都在这条直线的同一侧,则这两个点是凸包上的点,否则就不是。
- 步骤:
- 将点集里面的所有点两两配对,组成 C n 2 = n ( n − 1 ) / 2 C_n^2 = n(n-1)/2 Cn2=n(n−1)/2条直线
- 对于每条直线,再检查剩余的 ( n − 2 ) (n-2) (n−2)个点是否在直线的同一侧
如何判断一个点 p 3 p_3 p3是在点 p 1 、 p 2 p_1、p_2 p1、p2连成的直线的左边还是右边呢?坐标: p 1 ( x 1 , y 1 ) , p 2 ( x 2 , y 2 ) , p 3 ( x 3 , y 3 ) p_1(x_1, y_1),p_2(x_2, y_2),p_3(x_3, y_3) p1(x1,y1),p2(x2,y2),p3(x3,y3)

分治法
- 时间复杂度:O(n㏒n)。
- 思路:应用分治法思想,把一个大问题分成几个结构相同的子问题,把子问题再分成几个更小的子问题……。然后我们就能用递归的方法,分别求这些子问题的解。最后把每个子问题的解“组装”成原来大问题的解。
- 步骤:
- 把所有的点都放在二维坐标系里面。那么横坐标最小和最大的两个点 P 1 P_1 P1和 P n P_n Pn一定是凸包上的点。直线 P 1 P n P_1P_n P1Pn把点集分成了两部分,即 X X X轴上面和下面两部分,分别叫做上包和下包
- 对上包:求距离直线 P 1 P n P_1P_n P1Pn最远的点,假设为点 P m a x P_{max} Pmax
- 作直线 P 1 P m a x P_1P_{max} P1Pmax、 P n P m a x P_nP_{max} PnPmax,把直线 P 1 P m a x P_1P_{max} P1Pmax左侧的点当成是上包,把直线 P n P m a x P_nP_{max} PnPmax右侧的点也当成是上包
- 重复步骤 2、3
- 对下包也作类似操作

然而怎么求距离某直线最远的点呢?
设有一个点 P 3 P_3 P3和直线 P 1 P 2 P_1P_2 P1P2。坐标: p 1 ( x 1 , y 1 ) , p 2 ( x 2 , y 2 ) , p 3 ( x 3 , y 3 ) p_1(x_1, y_1),p_2(x_2, y_2),p_3(x_3, y_3) p1(x1,y1),p2(x2,y2),p3(x3,y3)

注意:在步骤一,如果横坐标最小的点不止一个,那么这几个点都是凸包上的点,此时上包和下包的划分就有点不同了,需要注意
#include Jarvis步进法
- 时间复杂度:O(nH)。(其中 n 是点的总个数,H 是凸包上的点的个数)
- 思路:纵坐标最小的那个点一定是凸包上的点,例如下图中的 P 0 P_0 P0。从 P 0 P_0 P0开始,按逆时针的方向,逐个找凸包上的点,每前进一步找到一个点,所以叫作步进法。
怎么找下一个点呢?利用夹角。假设现在已经找到 P 0 , P 1 , P 2 {P_0,P_1,P_2} P0,P1,P2了,要找下一个点:剩下的点分别和 P 2 P_2 P2组成向量,设这个向量与向量 P 1 P 2 P_1P_2 P1P2的夹角为 β 。当 β 最小时就是所要求的下一个点了,此处为 P 3 P_3 P3。
注意:
- 找第二个点 P 1 P_1 P1时,因为已经找到的只有 P 0 P_0 P0一个点,所以向量只能和水平线作夹角 α,当 α 最小时求得第二个点

- 共线情况:如果直线 P 2 P 3 P_2P_3 P2P3上还有一个点 P 4 P_4 P4,即三个点共线,此时由向量 P 2 P 3 P_2P_3 P2P3和向量 P 2 P 4 P_2P_4 P2P4产生的两个 β 是相同的。我们应该把 P 3 P_3 P3、 P 4 P_4 P4都当做凸包上的点,并且把距离 P 2 P_2 P2最远的那个点(即上图中的 P 4 P_4 P4)作为最后搜索到的点,继续找它的下一个连接点
Graham扫描法
- 时间复杂度:O(n㏒n) 。
- 思路:Graham扫描的思想和Jarris步进法类似,也是先找到凸包上的一个点,然后从那个点开始按逆时针方向逐个找凸包上的点,但它不是利用夹角

- 步骤:
- 把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点,记为 P 0 P_0 P0
- 把所有点的坐标平移一下,使 P 0 P_0 P0作为原点
- 计算各个点相对于 P 0 P_0 P0的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 P 0 P_0 P0比较近的排在前面。例如上图得到的结果为 P 1 , P 2 , P 3 , P 4 , P 5 , P 6 , P 7 , P 8 P_1,P_2,P_3,P_4,P_5,P_6,P_7,P_8 P1,P2,P3,P4,P5,P6,P7,P8。我们由几何知识可以知道,结果中第一个点 P 1 P_1 P1和最后一个点 P 8 P_8 P8一定是凸包上的点。以上,我们已经知道了凸包上的第一个点 P 0 P_0 P0和第二个点 P 1 P_1 P1,我们把它们放在栈里面。现在从步骤3求得的那个结果里,把 P 1 P_1 P1后面的那个点拿出来做当前点,即 P 2 P_2 P2。接下来开始找第三个点:
- 连接栈最上面的两个元素,得到直线 L L L 。看当前点是在直线 L L L的右边还是左边。如果在直线的右边就执行步骤5;如果在直线上,或者在直线的左边就执行步骤6
- 如果在右边,则栈顶的那个元素不是凸包上的点,把栈顶元素出栈。执行步骤4
- 当前点是凸包上的点,把它压入栈,执行步骤7
- 检查当前的点是不是步骤3那个结果的最后一个元素。是最后一个元素的话就结束。如果不是的话就把当前点后面那个点做当前点,返回步骤4
最后,栈中的元素就是凸包上的点了
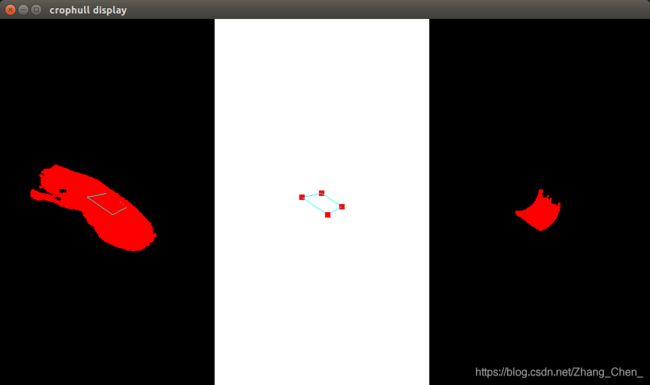
GropHull任意多边形内部点云提取
#include 程序运行结果:
结语
如果您有修改意见或问题,欢迎留言或者通过邮箱和我联系。
手打很辛苦,如果我的文章对您有帮助,转载请注明出处。