浅析伺服增益调整原理及应用经验
摘要:伺服应用于要求精度高、定位快的场合,在简单的调整刚性和惯量比无法满足现场要求时,该如何对伺服进行增益调整? 雷赛总结多种应用实例,从伺服控制本质的三环控制、三环带宽的关系、增益参数调试步骤、各增益参数原理以及对伺服运行的影响、常用滤波器等方面介绍伺服增益调整原理与应用经验。
雷赛伺服驱动器由电流控制环,速度控制环和位置控制环三个环路组成,控制框图如下:
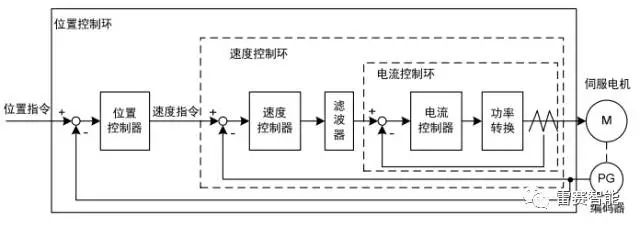
内层的带宽一定大于外层的带宽,否则整个控制系统为不稳定系统,会造成系统震荡。所以,以上三个环路的带宽关系为:
电流环带宽>速度环带宽>位置环带宽
位置和速度带宽的选择是否合适是由机械的刚性和现场应用场合决定的,一般的应用场合,调整惯量比和刚性即可达到现场的响应和定位要求。
由皮带、链条或带波动齿轮减速机连接的机械负载刚性较低,可设置为较低带宽,刚性一般大致为7~10,例如:多关节机器人等;
直接驱动滚珠丝杠的机械负载刚性较高,可设置为较大带宽,刚性一般大致为14~17,例如:机床、贴片机等进行高精度加工机械;
由减速机带动的滚珠丝杠的机械负载刚性中等,可设置为中等带宽,刚性一般大致为11~14,例如:一般工作机、搬运机械等;
如果惯量比和刚性调整后,依然无法达到现场的应用要求,需要对位置环和速度环的参数一一进行微调时,但需要注意的是,如果改变其中一个参数,则其他参数也需要重新调整,请不要对某一个参数做较大额的更改。一般可遵循以下步骤:
提高伺服响应
降低伺服响应
1、提高速度环增益;
2、减小速度环积分
时间常数;
3、提高位置环增益;
1、减小速度环增益;
2、增大速度环积分
时间常数;
3、减小位置环增益;

雷赛交流伺服驱动及电机
位置控制的增益调整步骤如下:
1、 设定合适的转动惯量比;
2、 设定速度环积分时间常数为较大值;
3、 加大速度环增益,如果机械振动,稍许调小;
4、 减小速度环积分时间常数,如果机械振动,稍许调大;
5、 增大位置环增益,如果机械振动,稍许调小;
6、 如果因为机械系统发生共振而无法加大增益,进而无法得到应有的伺服应用要求,可以对转矩低通滤波器或陷波器调整抑制机械系统共振;然后重新操作以上步骤以提高伺服性。建议首先使用转矩低通滤波器,若转矩低通滤波器效果不好再考虑陷波器;
7、 若需要更短的定位时间和更小的位置跟踪误差,可适当增加速度前馈,即速度前馈增益,但不宜超过80%;
速度控制的增益调整步骤如下:
1、设定合适的转动惯量比;
2、设定速度环积分时间常数为较大值;
3、加大速度环增益,如果机械振动,稍许调小;
4、减小速度环积分时间常数,如果机械振动,稍许调大;
5、如果因为机械系统发生共振而无法加大增益,进而无法得到应有的伺服应用要求,可以对转矩低通滤波器或陷波器调整抑制机械系统共振;然后重新操作以上步骤以提高伺服性。建议首先使用转矩低通滤波器,若转矩低通滤波器效果不好再考虑陷波器;
速度环增益:
速度环增益直接决定了速度环的响应带宽。在机械系统不产生共振或噪音的情况下,增大速度环增益,速度响应会越快,对速度的跟随性越好。但过大的速度环增益会引起机械共振。
速度环带宽(Hz) = (1+G)/(1+JL/JM)*速度环增益(Hz)
其中:G为转动惯量比,JL为折算到电机轴的负载转动惯量,JM为电机转子转动惯量。当设定值G=JL/JM时,速度环增益即为速度环带宽。
速度环积分时间常数:
速度环积分时间常数可以有效的消除速度稳态误差,快速反应细微的速度变化。在机械系统不产生共振或噪音的情况下,减小速度环积分时间常数,可以增加系统刚性,降低稳态误差。如果负载惯量比很大或机械系统存在共振因素,必须加大速度环积分时间常数,减小积分的作用,否则机械系统容易发生共振。如果惯量比参数G设置为JL/JM的情况下,速度环积分时间常数为:
速度环积分时间常数(ms) = 4000/(2*pi*速度环增益(Hz))其中:pi为圆周率。
位置环增益:
位置环增益直接决定了位置环的反应速度。在机械系统不产生共振或噪音的情况下,增加位置环增益,减小位置跟踪误差,缩短定位时间。但过大的位置环增益也会造成机械系统抖动或定位超调。位置环带宽不可高于速度环带宽,如下:
位置环带宽(Hz) <= 速度环带宽(Hz)/4
如果惯量比参数G设置为JL/JM,位置环增益可以计算:
位置环增益(1/s) <= 2*pi*速度环增益(Hz)/4
转矩低通滤波器:
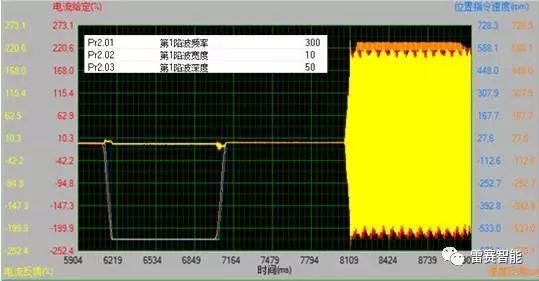
低通滤波器对高频有很好的衰减,能较好的抑制高频震荡和噪声,但对中低频共振无抑制作用。例如丝杠连接负载时,增加刚性可以提高系统响应,当提高到一定程度时,有时会发生高频共振,电流发生震荡,使用转矩低通滤波器会有较好的效果。
设置值越小,系统的响应性越能很好的控制,但受机械条件限制;设置值越大,越能抑制高频共振,但太大设置值会造成响应带宽和相位裕度减小,造成系统震荡。

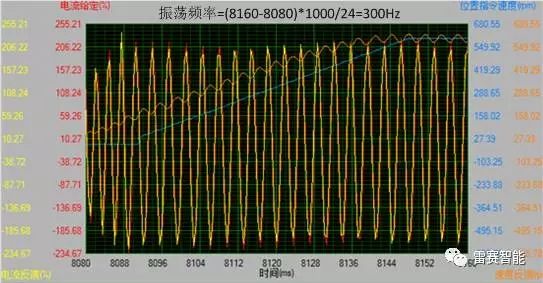
陷波器:
伺服驱动器中有两个陷波器,可以同时使用,能抑制两种不同的频率共振。系统的共振频率可以大概通过观看电流波形计算得到,共振频率知道的情况下,陷波器可以直接将共振现象消除;共振频率不确定的情况下,可以从高到低逐步降低陷波器频率设置值,直至电流振荡最小的频率设置值即为最优值。
如果共振频率是随着时间或其他因素偏移的,且偏移范围较大,则陷波器不适用。
陷波器不仅包括频率这个参数,还包括陷波器深度和品质因数。陷波器深度越深,机械共振抑制效果越好,但会造成相位延迟大,有时反而会加大系统的振动;陷波器宽度越宽,品质因数越小,机械共振抑制效果越好,但也会造成相位变化区域大,有时也反而会加大系统的振动。
雷赛伺服常见的调试步骤:
确定接线方式
查看使能方式,在外部使能时,参数Pr4.00使用默认参数。当内部使能时参数Pr4.00值更改为383。

Pr4.10为驱动器报警输出,当410参数设置为0101时,正常输出电压为0V,报警输出为24V,当多个驱动器报警点并联时,测得输出为0V,不能反映报警状态。
当参数设置为8181时,正常输出电压为24V,报警输出为0V,当多个驱动器报警点并联时,测得输出为0V,可以反映报警状态。
确定脉冲输入方式,确定参数Pr0.06和Pr0.07


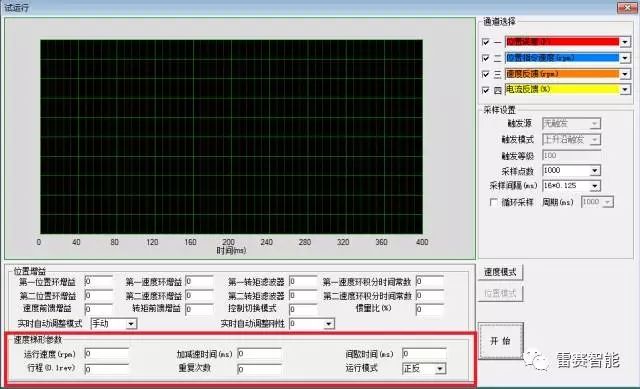
测试负载惯量
驱动器面板监控参数D16可以显示负载惯量。测试方法:
运行速度≥1000rpm,间歇时间≥1000,重复次数≥1,加减速时间和行程根据应用要求设置。 然后点“开始”,观察驱动器面板d16 Jrt检测到的负载惯量值。把监测到的负载惯量平均值减去100填入Pr004。(100是指电机转子自身负载惯量)

设备刚性
在设备允许的情况下,尽可能增大刚性,当设备出现抖动时,减小刚性。

刚性调整如下:
A:当参数Pr0.02为1或2时,直接调整刚性Pr0.03,刚性关联的参数如下表参数:

第1增益和第2增益的切换按照参数Pr1.15设置:
![]()
B:当参数Pr0.02为0时,刚性Pr0.03与上表中关联第1增益和第2增益参数解绑,可以按上述步骤拆分对位置环增益、速度环增益、速度环积分时间常数、转矩滤波器分别调整。
电子齿轮比
电子齿轮的关联参数为 Pr0.09 和 Pr0.10
驱动器默认脉冲数为10000,当实际脉冲数为10000时,两个参数都为1
当实际脉冲为1000时,Pr0.09 为10, Pr0.10为1,即默认脉冲数与实际脉冲数的比值。

面板操作方法

参数保存操作步骤:
