- DeepSeek 模型未来怎么走?技术创新、行业落地全解析!
网罗开发
AI大模型人工智能人工智能职场和发展
网罗开发(小红书、快手、视频号同名) 大家好,我是展菲,目前在上市企业从事人工智能项目研发管理工作,平时热衷于分享各种编程领域的软硬技能知识以及前沿技术,包括iOS、前端、HarmonyOS、Java、Python等方向。在移动端开发、鸿蒙开发、物联网、嵌入式、云原生、开源等领域有深厚造诣。图书作者:《ESP32-C3物联网工程开发实战》图书作者:《SwiftUI入门,进阶与实战》超级个体:CO
- ESP32学习 -从STM32工程架构进阶到ESP32架构
古希腊掌握嵌入式的神
学习stm32架构esp32
ESP32与STM32项目文件结构对比解析以下是对你提供的ESP32项目文件结构的详细解释,并与STM32(以STM32CubeIDE为例)的常见结构进行对比,帮助你理解两者的差异:1.ESP32项目文件解析文件/目录作用STM32对应或差异settingsIDE(如VSCode或Eclipse)的用户配置文件,存储个性化设置。STM32CubeIDE中类似配置存储在.settings目录或IDE
- 10.2 如何解决从复杂 PDF 文件中提取数据的问题?
墨染辉
大语言模型pdf
10.2如何解决从复杂PDF文件中提取数据的问题?解决方案:嵌入式表格检索解释:嵌入式表格检索是一种专门针对从复杂PDF文件中的表格提取数据的技术。它结合了表格识别、解析和语义理解,使得从复杂结构的表格中检索信息成为可能。具体步骤:表格检测和识别:目标:在PDF页面中准确地定位和识别表格区域。方法:使用计算机视觉和深度学习技术,如卷积神经网络(CNN)或其他先进的图像处理算法。效果:能够检测出页面
- C/C++学习路线概述
DustWind丶
C/C++c++
根据如下视频和文章总结:想做C语言/C++开发?这些才是你该学的东西!C语言/C++直通企业级开发的详细学习路线节选:肝了半个月,我整理出了这篇嵌入式开发学习学习路线+知识点梳理目录1C/C++学习概述1.1C语言的基础知识1.2C++的基础知识2C/C++编程学习四大件2.1数据结构和算法2.2操作系统2.3计算机网络2.3.1计算机网络分层2.3.2典型协议(以TCP/IP四层模型举例)2.4
- 211 本硕研三,已拿 C++ 桌面应用研发 offer,计划转音视频或嵌入式如何规划学习路线?
程序员yt
c++音视频学习
今天给大家分享的是一位粉丝的提问,211本硕研三,已拿C++桌面应用研发offer,计划转音视频或嵌入式如何规划学习路线?接下来把粉丝的具体提问和我的回复分享给大家,希望也能给一些类似情况的小伙伴一些启发和帮助。同学提问:前辈您好,我是211本硕,目前研三,秋招拿到C++桌面应用研发的offer,但计划的这个岗位最多干3-4年左右,后续企业规划上想往音视频开发或嵌入式上转;个人感觉C++八股,算法
- stm32完全学习——NRF24L01模块
小A159
STM32完全学习stm32学习嵌入式硬件
对于这个模块的移植,无论是标准库还是HAL库,无论是软件模拟SPI还是,硬件SPI通信,网上都有很多的例子,这里关于移植的事情就不再赘述了。一、调试中遇到的一些问题我是用的别人的代码进行移植的,使用的是软件模拟SPI时序,在进行通信的时候,可以正确检测到NRF24L01的存在,但是发送数据和接收数据都不能成功的运行,本来以为是发送的时候数据包设置的不正确,后来发现他的代码里面使用软件SPI里面的延
- 【DNN量化工具】QKeras 工具简介
kanhao100
笔记dnn人工智能神经网络
QKeras工具简介QKeras是一个用于量化深度学习模型的Keras扩展库,旨在使深度学习模型的量化(即将模型的浮点权重转换为低精度格式)变得简单而高效。QKeras主要目标是优化模型的存储和推理速度,特别适用于需要在资源受限的设备(如移动设备和嵌入式系统)上运行深度学习模型的场景。QKeras的主要特点量化支持:QKeras提供了对不同类型量化的支持,包括权重量化和激活量化。用户可以根据需求选
- CS5802一款HDMI转Typec方案转换芯片
芯片嵌入式
CS5802是一款HDMI2.0b到Type-C转换器。C55802具有HDMI2.0b输入,最大带宽可达18Gbps。它支持4K@60Hz的最高分辨率。对于Type-Coutput,它由4个数据通道组成,支持1.62Gbps、2.7Gbps、5.4Gbps的链路速率。内置的可选SSC功能减少了EMI影响。嵌入式微控制器基于32位RISC-Vcore和内部串行闪存。CS5802适用于多个细分市场和
- QKeras、Brevitas和QONNX量化工具对比
kanhao100
笔记深度学习边缘计算
QKeras、Brevitas和QONNX量化工具对比一、引言在深度学习模型部署领域,量化技术已成为提升模型执行效率的关键手段。通过将浮点权重转换为低精度表示,量化能显著减小模型体积、降低内存占用并加速推理过程。对于资源受限的设备(如移动设备、嵌入式系统和边缘计算设备),量化技术尤为重要。本文深入对比三款主流量化工具:QKeras、Brevitas和QONNX,从用户实际应用角度剖析它们的技术特点
- STM32f429串口通信-基于HAL库
大大大冯小小
串口通信stm32嵌入式
STM32f429串口通信接收-基于HAL库串口接收配置步骤1.调用函数HAL_UART_Init(UART_HandleTypeDef*huart)。通过定义结构体类型句柄UART_HandleTypeDef并初始化相关参数来配置串口通信的选用串口、字长、波特率、停止位、奇偶校验位、硬件流控、收发模式、DMA等。UART_HandleTypeDefusart1_handler;//UART句柄结
- HAL库操作STM32串口
2021.09
STM32-CubeMXstm32单片机arm
本次博客知识来自于韦东山老师的7天物联网课程。一、cubeMX产生工程框架先从左侧选择串口1,再选择异步通信。二、分析程序如下图,cubeMX自动生成了串口初始化函数。三、编写程序以上初始化完成后,就可以使用HAL库提供的“HAL_UART_Transmit()”从串口发送数据,使用“HAL_UART_Receive()”接收数据,但这样使用不方便,需要自己处理数据类型。在学习C语言时,通常使用p
- STM32寄存器编码流程总结(上部)
物联网菜鸟
基础知识学习stm32单片机嵌入式硬件
目录一、GPIO二、中断系统三、USART串口通信四、I2C通讯五、高级定时器六、DMA存储访问七、ADC数模转换八、API通信九、FSMC控制器十、LCD显示一、GPIO1.时钟的配置//开启引脚的时钟RCC->APB2ENR|=RCC_APB2ENR_IOPAEN;2.设置GPIO的工作模式//PA0的工作模式为通用推挽输出模式//CNF选择输入或输出的不同模式GPIOA->CRL&=~GPI
- SpringBoot可以同时处理多少请求?
java1234_小锋
javajava开发语言
大家好,我是锋哥。今天分享关于【SpringBoot可以同时处理多少请求?】面试题。希望对大家有帮助;SpringBoot可以同时处理多少请求?1000道互联网大厂Java工程师精选面试题-Java资源分享网SpringBoot本身并不直接限制可以处理的请求数量,能处理多少请求取决于几个因素,主要是底层的Web服务器(如嵌入式的Tomcat、Jetty或Undertow),以及服务器硬件、操作系统
- 嵌入式笔记 | 正点原子STM32F103ZET6 3 | 时钟系统
J鸟
笔记stm32单片机嵌入式硬件
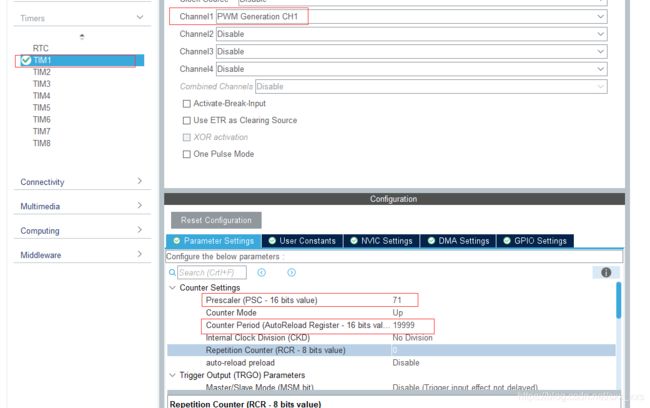
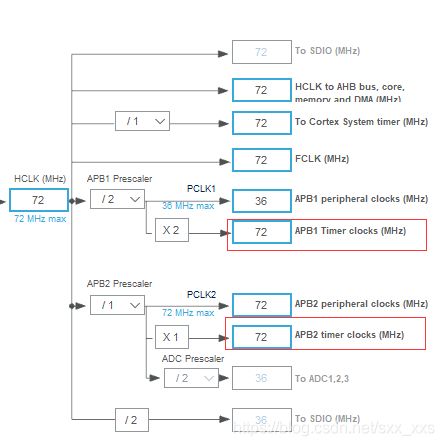
1.RCC(复位和时钟控制)RCC(ResetandClockControl)是STM32的时钟系统控制模块,负责管理整个芯片的时钟信号。在使用任何外设之前,必须先使能其时钟。2.时钟系统框图解析时钟源(5种)HSI(高速内部时钟)由内部RC振荡器产生,默认8MHz精度较低,适用于对时钟精度要求不高的应用可作为系统时钟源HSE(高速外部时钟)由外部晶振(石英/陶瓷谐振器或外部时钟)产生,频率范围4
- 使用arm-linux-gdb进行正确安装和编程
风华绚烂
arm开发linux运维编程
在嵌入式系统开发中,使用适用于ARM架构的调试器是至关重要的。GNU调试器(GDB)是一个功能强大的调试工具,可以用于调试ARM平台上的应用程序。本文将介绍如何正确安装arm-linux-gdb,并提供一些示例源代码,以便您开始进行ARM平台上的编程和调试。步骤1:安装arm-linux-gdb首先,我们需要安装arm-linux-gdb。以下是在Linux上安装arm-linux-gdb的步骤:
- STM32上实现简化版的AUTOSAR DEM模块
智驾
STM32stm32AUTOSARDEMDTCFlashDBNvm
文章目录摘要摘要在一些可以不使用AUTOSAR的项目中,往往也有故障检测和DTC存储的需求,开发一套类似于AUTOSARDEM模块的软件代码,能够满足DTC的检出和存储,使用FalshDB代替Nvm模块,轻松构建持久化存储,如果你也有这样的需求,请阅读本篇,希望能够帮到你。/**************************************************************
- 嵌入式硬件篇---WIFI模块
Ronin-Lotus
程序代码篇嵌入式硬件篇嵌入式硬件cWIFI
文章目录前言一、核心工作原理1.物理层(PHY)工作频段2.4GHz5GHz调制技术直接序列扩频正交频分复用高效数据编码2.协议栈架构MAC层Beacon帧4次握手3.核心工作模式二、典型应用场景1.智能家居系统远程控制环境监测视频监测2.工业物联网设备远程运维生产线监控仓储管理3.医疗设备远程诊疗医疗影像药品管理4.消费电子智能音箱游戏设备打印设备三、ESP32开发示例1.环境配置(Platfo
- 『解决ping问题』windows ubuntu 开发板三者互连如何设置
指向NULL
环境&调试嵌入式
嵌入式开发中,我们经常会遇到ping问题,也就是windows主机,虚拟机和开发板之间互相ping不通的问题,看了韦东山老师关于此部分的讲解做了以下总结。1.确定虚拟机使用的网卡先来看几种应用场景:情景一:PC机使用有线网卡A直接连接开发板。这种情况下我们使用了有线网卡A最终连接了开发板,所以虚拟机要设置有线网卡A作为桥接网卡。情景二:PC机使用无线网卡A连接路由器,开发板连接到同一路由器的有线网
- 探索 ESP32:物联网时代的全能微控制器
菜只因C
物联网
引言:从ESP8266到ESP32的进化之路在物联网(IoT)蓬勃发展的今天,嵌入式设备需要兼具高性能、低功耗和联网能力。乐鑫科技(RobinLi)推出的ESP32系列芯片,正是这一需求下的产物。自2016年发布以来,ESP32凭借其卓越的综合性能,迅速成为物联网开发者的首选平台。本文将从硬件架构、核心功能、开发生态到实际应用,全面解析这款"物联网心脏"的奥秘。一、ESP32的硬件架构解析1.1双
- Linux基础指令详解:掌握Linux系统的必备技能
秋秋爱编码
linux服务器运维
在数字化时代,Linux以其稳定性、安全性和灵活性成为了服务器、嵌入式系统以及开发环境中的首选操作系统。对于初学者而言,掌握Linux的基本指令是踏入这个强大操作系统的第一步。本文将详细介绍一些Linux系统中最为基础且常用的指令,帮助读者快速上手Linux。一、Linux基础指令概述Linux指令行界面(CLI)是其核心部分之一,通过命令行可以执行各种系统管理和文件操作任务。掌握这些基础指令,不
- 这个设计思想能启蒙你很多年,嵌入式裸机按键扫描
大方老师嵌入式
嵌入式单片机单片机学习单片机51单片机嵌入式硬件
这个设计思想能启蒙你很多年,嵌入式裸机按键扫描摘要:本文目的是讲述一个按键扫描处理的面向对象开发的设计思想,适用于裸机开发,通过按键扫描,检测到按键是否按下,松开等状态,并将该状态通过其他形式反馈给其他模块进行处理。初次使用按键时,最常用的办法就是如以下代码一样,硬延时抖动滤波,等待确认后做相应的处理。void KEY_Scan(void){
- STM32单片机中APB1和APB2总线选择
新手懒羊哥
单片机stm32嵌入式硬件
在STM32单片机中,APB1和APB2是两种不同的外设总线,它们的主要区别在于连接的外设类型和时钟频率。以下是使用APB1和APB2的时机:APB1(低速总线):APB1的最高频率一般为36MHz或42MHz。适用于连接低速外设,如I2C、SPI、USART、USB、DAC、I/O端口、定时器等。如果外设的时序要求不是很严格,或者数据传输速率较低,适合使用APB1。APB2(高速总线):APB2
- STM32 —— 嵌入式系统、通用计算机系统、物联网三层架构
Exhausted、
stm32单片机stm32嵌入式硬件物联网架构
目录一、嵌入式系统的概念二、通用计算机系统与嵌入式系统的比较用途硬件软件性能与功耗开发与维护三、嵌入式系统与物联网的关系四、物联网的三层架构1.感知层(PerceptionLayer)2.网络层(NetworkLayer)3.应用层(ApplicationLayer)三层架构的协作流程一、嵌入式系统的概念嵌入式系统一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统以及应用程序等4部分组成,并且分为
- c#:使用串口通讯实现数据的发送和接收
妮妮学代码
c#串口通讯c#开发语言
串口通讯(SerialCommunication)是一种常见的硬件设备与计算机之间的数据传输方式,广泛应用于工业控制、嵌入式系统、传感器数据采集等领域。本文将详细介绍如何使用C#实现基于串口通讯的数据发送和接收,并结合代码示例解析其实现过程。1.概述串口通讯的核心是System.IO.Ports.SerialPort类,它封装了串口操作的底层细节,提供了简单易用的接口。以下是串口通讯的基本流程:1
- stm32 栈 HardFault_Handler 硬件中断 解决问题
月骑荞面山
stm32嵌入式硬件单片机
stm32进入硬件中断分析stm32的栈空间,是用于在发生中断时,保存CPU的一些寄存器(不是全部CPU寄存器)和保存函数的局部变量、等(注意这个等,说明是不仅仅包含这些)的空间,这就是入栈。中断函数运行完,CPU将使用栈空间的内容,恢复自己所有的寄存器,以及局部变量,这就是出栈。栈空间大小,由自己设置,如下图,不会的话,就去看其他文章栈空间大小设置好后,编译后,栈将会分配被分配真实的内存地址,怎
- stm32h7关串口中断怎么弄_stm32h7“HardFault_Handler(硬件异常中断)分析”
weixin_39926191
stm32h7关串口中断怎么弄
在stm32调试中有时候会进入硬件异常中断HardFault_Handler。SEGGER公司(旗下有大名鼎鼎的emWin图形工具)提供一种硬件异常中断HardFault_Handler定位调试方法。在MDK和IAR开发环境都适用。这里,我们在MDK开发环境上记录一次调试经历。1、硬件异常案例主函数是对按键K1和摇杆OK的接收处理操作,如伪代码1伪代码1intmain(void){//按键初始化函
- STM32 SPI总线驱动CH376T实现U盘/TF卡读写全解析—SPI通信、命令集与文件操作(下) | 零基础入门STM32第七十五步
触角01010001
STM32入门教程(100步)stm32驱动开发单片机嵌入式硬件物联网
主题内容教学目的/扩展视频CH376芯片重点课程电路原理,跳线设置,切换U盘和TF卡。手册分析。驱动程序。调用常用函数。会调用现有函数操作U盘即可。师从洋桃电子,杜洋老师文章目录1.引言2.硬件连接3.驱动程序分析3.1SPI通信机制4.CH376命令集详解4.1常用命令表4.2命令使用示例5.初始化程序解析6.数据读写函数实现6.1写数据到文件6.2从文件读取数据7.应用示例:U盘状态检测8.扩
- STM32F407 SPI1源代码
heraldww
keilARMstm32单片机嵌入式硬件
头文件#ifndef__spi1_PA567_H#define__spi1_PA567_H#include"sys.h"#include"project_config.h"#include"gpio.h"////本程序只供学习使用,未经作者许可,不得用于其它任何用途//ALIENTEKSTM32F407开发板//SPI驱动代码//正点原子@ALIENTEK//技术论坛:www.openedv.co
- 在嵌入式系统中实现低功耗MQTT协议:从协议解析到硬件优化
W说编程
物联网嵌入式网络编程物联网网络协议c语言嵌入式硬件
在嵌入式系统中实现低功耗MQTT协议:从协议解析到硬件优化1.引言:物联网时代的低功耗挑战随着物联网设备的爆炸式增长,设备续航与网络可靠性成为嵌入式系统设计的核心矛盾。据统计,70%的物联网设备因功耗问题导致维护成本倍增。核心需求:在维持TCP/IP协议栈功能的前提下,将设备待机功耗降至μA级;确保弱网环境(如2G/NB-IoT)下的数据传输可靠性。本文将以MQTT协议为例,详解在STM32+LW
- 保姆级 STM32 HAL 库外部中断教学
CircuitWizard
单片机stm32单片机嵌入式硬件
1.外部中断概述为什么用外部中断?当按键按下时,CPU无需轮询检测引脚状态,而是通过中断机制立即响应,提高效率,适用于实时性要求高的场景。关键概念EXTI(ExternalInterrupt/EventController):STM32的外设,负责管理外部中断/事件。NVIC(NestedVectoredInterruptController):管理中断优先级和使能。GPIO与EXTI的映射:每个
- JVM StackMapTable 属性的作用及理解
lijingyao8206
jvm字节码Class文件StackMapTable
在Java 6版本之后JVM引入了栈图(Stack Map Table)概念。为了提高验证过程的效率,在字节码规范中添加了Stack Map Table属性,以下简称栈图,其方法的code属性中存储了局部变量和操作数的类型验证以及字节码的偏移量。也就是一个method需要且仅对应一个Stack Map Table。在Java 7版
- 回调函数调用方法
百合不是茶
java
最近在看大神写的代码时,.发现其中使用了很多的回调 ,以前只是在学习的时候经常用到 ,现在写个笔记 记录一下
代码很简单:
MainDemo :调用方法 得到方法的返回结果
- [时间机器]制造时间机器需要一些材料
comsci
制造
根据我的计算和推测,要完全实现制造一台时间机器,需要某些我们这个世界不存在的物质
和材料...
甚至可以这样说,这种材料和物质,我们在反应堆中也无法获得......
- 开口埋怨不如闭口做事
邓集海
邓集海 做人 做事 工作
“开口埋怨,不如闭口做事。”不是名人名言,而是一个普通父亲对儿子的训导。但是,因为这句训导,这位普通父亲却造就了一个名人儿子。这位普通父亲造就的名人儿子,叫张明正。 张明正出身贫寒,读书时成绩差,常挨老师批评。高中毕业,张明正连普通大学的分数线都没上。高考成绩出来后,平时开口怨这怨那的张明正,不从自身找原因,而是不停地埋怨自己家庭条件不好、埋怨父母没有给他创造良好的学习环境。
- jQuery插件开发全解析,类级别与对象级别开发
IT独行者
jquery开发插件 函数
jQuery插件的开发包括两种: 一种是类级别的插件开发,即给
jQuery添加新的全局函数,相当于给
jQuery类本身添加方法。
jQuery的全局函数就是属于
jQuery命名空间的函数,另一种是对象级别的插件开发,即给
jQuery对象添加方法。下面就两种函数的开发做详细的说明。
1
、类级别的插件开发 类级别的插件开发最直接的理解就是给jQuer
- Rome解析Rss
413277409
Rome解析Rss
import java.net.URL;
import java.util.List;
import org.junit.Test;
import com.sun.syndication.feed.synd.SyndCategory;
import com.sun.syndication.feed.synd.S
- RSA加密解密
无量
加密解密rsa
RSA加密解密代码
代码有待整理
package com.tongbanjie.commons.util;
import java.security.Key;
import java.security.KeyFactory;
import java.security.KeyPair;
import java.security.KeyPairGenerat
- linux 软件安装遇到的问题
aichenglong
linux遇到的问题ftp
1 ftp配置中遇到的问题
500 OOPS: cannot change directory
出现该问题的原因:是SELinux安装机制的问题.只要disable SELinux就可以了
修改方法:1 修改/etc/selinux/config 中SELINUX=disabled
2 source /etc
- 面试心得
alafqq
面试
最近面试了好几家公司。记录下;
支付宝,面试我的人胖胖的,看着人挺好的;博彦外包的职位,面试失败;
阿里金融,面试官人也挺和善,只不过我让他吐血了。。。
由于印象比较深,记录下;
1,自我介绍
2,说下八种基本类型;(算上string。楼主才答了3种,哈哈,string其实不是基本类型,是引用类型)
3,什么是包装类,包装类的优点;
4,平时看过什么书?NND,什么书都没看过。。照样
- java的多态性探讨
百合不是茶
java
java的多态性是指main方法在调用属性的时候类可以对这一属性做出反应的情况
//package 1;
class A{
public void test(){
System.out.println("A");
}
}
class D extends A{
public void test(){
S
- 网络编程基础篇之JavaScript-学习笔记
bijian1013
JavaScript
1.documentWrite
<html>
<head>
<script language="JavaScript">
document.write("这是电脑网络学校");
document.close();
</script>
</h
- 探索JUnit4扩展:深入Rule
bijian1013
JUnitRule单元测试
本文将进一步探究Rule的应用,展示如何使用Rule来替代@BeforeClass,@AfterClass,@Before和@After的功能。
在上一篇中提到,可以使用Rule替代现有的大部分Runner扩展,而且也不提倡对Runner中的withBefores(),withAfte
- [CSS]CSS浮动十五条规则
bit1129
css
这些浮动规则,主要是参考CSS权威指南关于浮动规则的总结,然后添加一些简单的例子以验证和理解这些规则。
1. 所有的页面元素都可以浮动 2. 一个元素浮动后,会成为块级元素,比如<span>,a, strong等都会变成块级元素 3.一个元素左浮动,会向最近的块级父元素的左上角移动,直到浮动元素的左外边界碰到块级父元素的左内边界;如果这个块级父元素已经有浮动元素停靠了
- 【Kafka六】Kafka Producer和Consumer多Broker、多Partition场景
bit1129
partition
0.Kafka服务器配置
3个broker
1个topic,6个partition,副本因子是2
2个consumer,每个consumer三个线程并发读取
1. Producer
package kafka.examples.multibrokers.producers;
import java.util.Properties;
import java.util.
- zabbix_agentd.conf配置文件详解
ronin47
zabbix 配置文件
Aliaskey的别名,例如 Alias=ttlsa.userid:vfs.file.regexp[/etc/passwd,^ttlsa:.:([0-9]+),,,,\1], 或者ttlsa的用户ID。你可以使用key:vfs.file.regexp[/etc/passwd,^ttlsa:.: ([0-9]+),,,,\1],也可以使用ttlsa.userid。备注: 别名不能重复,但是可以有多个
- java--19.用矩阵求Fibonacci数列的第N项
bylijinnan
fibonacci
参考了网上的思路,写了个Java版的:
public class Fibonacci {
final static int[] A={1,1,1,0};
public static void main(String[] args) {
int n=7;
for(int i=0;i<=n;i++){
int f=fibonac
- Netty源码学习-LengthFieldBasedFrameDecoder
bylijinnan
javanetty
先看看LengthFieldBasedFrameDecoder的官方API
http://docs.jboss.org/netty/3.1/api/org/jboss/netty/handler/codec/frame/LengthFieldBasedFrameDecoder.html
API举例说明了LengthFieldBasedFrameDecoder的解析机制,如下:
实
- AES加密解密
chicony
加密解密
AES加解密算法,使用Base64做转码以及辅助加密:
package com.wintv.common;
import javax.crypto.Cipher;
import javax.crypto.spec.IvParameterSpec;
import javax.crypto.spec.SecretKeySpec;
import sun.misc.BASE64Decod
- 文件编码格式转换
ctrain
编码格式
package com.test;
import java.io.File;
import java.io.FileInputStream;
import java.io.FileOutputStream;
import java.io.IOException;
import java.io.InputStream;
import java.io.OutputStream;
- mysql 在linux客户端插入数据中文乱码
daizj
mysql中文乱码
1、查看系统客户端,数据库,连接层的编码
查看方法: http://daizj.iteye.com/blog/2174993
进入mysql,通过如下命令查看数据库编码方式: mysql> show variables like 'character_set_%'; +--------------------------+------
- 好代码是廉价的代码
dcj3sjt126com
程序员读书
长久以来我一直主张:好代码是廉价的代码。
当我跟做开发的同事说出这话时,他们的第一反应是一种惊愕,然后是将近一个星期的嘲笑,把它当作一个笑话来讲。 当他们走近看我的表情、知道我是认真的时,才收敛一点。
当最初的惊愕消退后,他们会用一些这样的话来反驳: “好代码不廉价,好代码是采用经过数十年计算机科学研究和积累得出的最佳实践设计模式和方法论建立起来的精心制作的程序代码。”
我只
- Android网络请求库——android-async-http
dcj3sjt126com
android
在iOS开发中有大名鼎鼎的ASIHttpRequest库,用来处理网络请求操作,今天要介绍的是一个在Android上同样强大的网络请求库android-async-http,目前非常火的应用Instagram和Pinterest的Android版就是用的这个网络请求库。这个网络请求库是基于Apache HttpClient库之上的一个异步网络请求处理库,网络处理均基于Android的非UI线程,通
- ORACLE 复习笔记之SQL语句的优化
eksliang
SQL优化Oracle sql语句优化SQL语句的优化
转载请出自出处:http://eksliang.iteye.com/blog/2097999
SQL语句的优化总结如下
sql语句的优化可以按照如下六个步骤进行:
合理使用索引
避免或者简化排序
消除对大表的扫描
避免复杂的通配符匹配
调整子查询的性能
EXISTS和IN运算符
下面我就按照上面这六个步骤分别进行总结:
- 浅析:Android 嵌套滑动机制(NestedScrolling)
gg163
android移动开发滑动机制嵌套
谷歌在发布安卓 Lollipop版本之后,为了更好的用户体验,Google为Android的滑动机制提供了NestedScrolling特性
NestedScrolling的特性可以体现在哪里呢?<!--[if !supportLineBreakNewLine]--><!--[endif]-->
比如你使用了Toolbar,下面一个ScrollView,向上滚
- 使用hovertree菜单作为后台导航
hvt
JavaScriptjquery.nethovertreeasp.net
hovertree是一个jquery菜单插件,官方网址:http://keleyi.com/jq/hovertree/ ,可以登录该网址体验效果。
0.1.3版本:http://keleyi.com/jq/hovertree/demo/demo.0.1.3.htm
hovertree插件包含文件:
http://keleyi.com/jq/hovertree/css
- SVG 教程 (二)矩形
天梯梦
svg
SVG <rect> SVG Shapes
SVG有一些预定义的形状元素,可被开发者使用和操作:
矩形 <rect>
圆形 <circle>
椭圆 <ellipse>
线 <line>
折线 <polyline>
多边形 <polygon>
路径 <path>
- 一个简单的队列
luyulong
java数据结构队列
public class MyQueue {
private long[] arr;
private int front;
private int end;
// 有效数据的大小
private int elements;
public MyQueue() {
arr = new long[10];
elements = 0;
front
- 基础数据结构和算法九:Binary Search Tree
sunwinner
Algorithm
A binary search tree (BST) is a binary tree where each node has a Comparable key (and an associated value) and satisfies the restriction that the key in any node is larger than the keys in all
- 项目出现的一些问题和体会
Steven-Walker
DAOWebservlet
第一篇博客不知道要写点什么,就先来点近阶段的感悟吧。
这几天学了servlet和数据库等知识,就参照老方的视频写了一个简单的增删改查的,完成了最简单的一些功能,使用了三层架构。
dao层完成的是对数据库具体的功能实现,service层调用了dao层的实现方法,具体对servlet提供支持。
&
- 高手问答:Java老A带你全面提升Java单兵作战能力!
ITeye管理员
java
本期特邀《Java特种兵》作者:谢宇,CSDN论坛ID: xieyuooo 针对JAVA问题给予大家解答,欢迎网友积极提问,与专家一起讨论!
作者简介:
淘宝网资深Java工程师,CSDN超人气博主,人称“胖哥”。
CSDN博客地址:
http://blog.csdn.net/xieyuooo
作者在进入大学前是一个不折不扣的计算机白痴,曾经被人笑话过不懂鼠标是什么,