games101学习笔记_Cameras, Lenses and Light Fields
games101_lecture19
- 相机(Camera)
-
- 视场(FOV,Field of View)
-
- 确定传感器大小
- 确定焦距
- 曝光(Exposure)
-
- ISO(Gain)
- F-Number(F-Stop,曝光等级)
- 快门
-
- 机械快门(Physical Shutter)
- 滚动快门(Rolling Shutter)
- Fast and Slow Photography
-
- 高速摄影(High-Speed Photography)
- 延时摄影(Long-Exposure Photography)
- 薄透镜近似(Thin Lens Approximation)
-
- 薄透镜公式(The Thin Lens Equation)
- 散焦模糊(Defocus Blur)
- 再次讨论F-Number
- 光线追踪中使用理想透镜(Ray Tracing Ideal Thin Lenses)
- 景深(Depth of Field)
我们从成像开始说起,图形学中成像有两种方式:光栅化和光线追踪
相机(Camera)
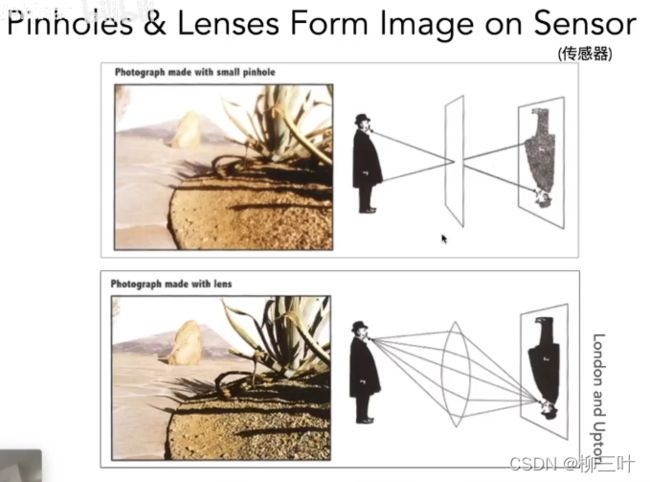
最早的相机就是利用“小孔成像”原理,后面发明了 “针孔相机”。
- 快门用于控制进入相机的时间,快门示意图:
- 传感器在曝光过程中可以捕捉光并将信息,另外,每个传感器的点只能记录Irradiance,不会记录 radiance。但目前随着科技发展,最新的一些传感器可以通过方向性的光分开传感分开记录。这里只考虑以前的相机。
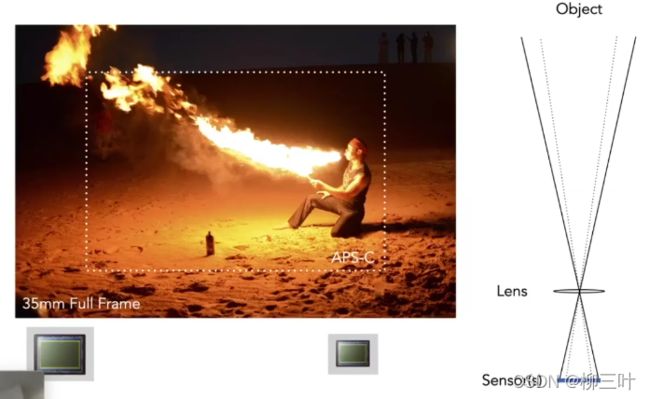
如果只有传感器,没有透镜行不行? - 不行,如果直接把传感器放到物体面前,那么成像平面上每个点会收到物体各个方向反射过来的光,一般的传感器本身只记录了irradiance信息,无法区分来自不同方向的光, 这样每个点就长得一样了。
针孔相机无法拍出东西的深度,任何地方都是清楚的,不会有虚化。

视场(FOV,Field of View)
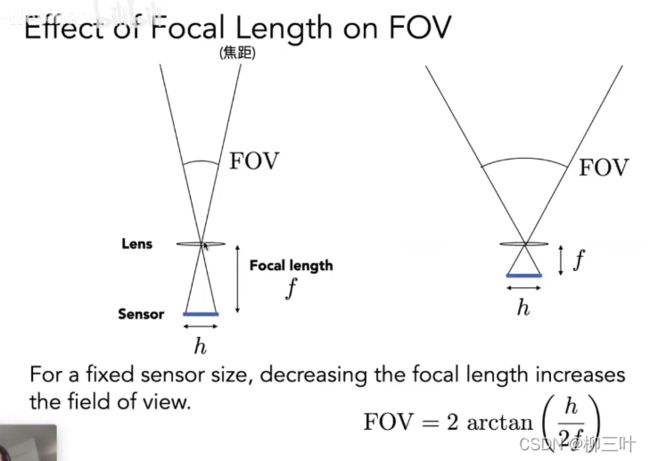
- 视场FOV:所谓视场,就是能看到多大的范围(我们常说的 广角相机 就是FOV比较大的一类相机)
- 焦距f:传感器和小孔的距离。
- 传感器大小h
我们要讨论的问题是,什么因素决定了FOV的大小。
根据上面的描述可以知道,视场FOV与焦距f和传感器大小h有关。
确定传感器大小
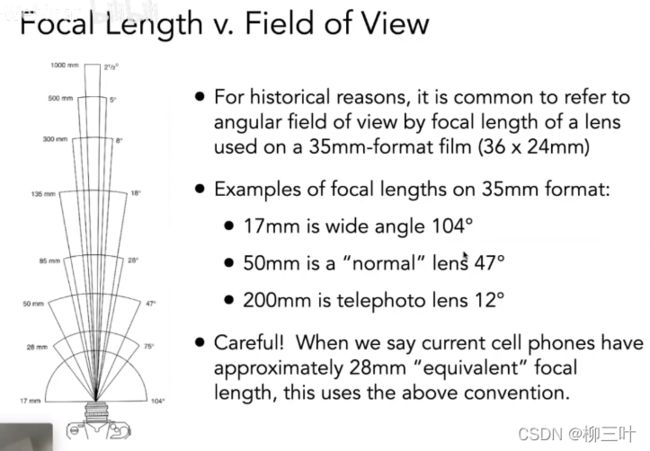
市面上通常都是确定完传感器的大小后,通过定义焦距的大小来决定FOV的值。
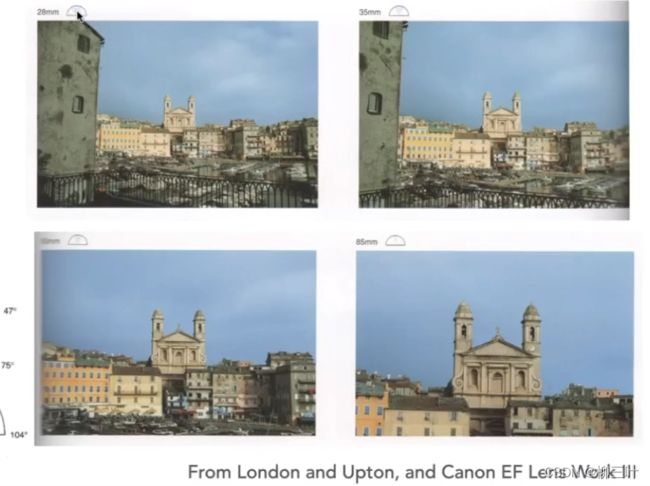
比如下图,图片都是站在同一个地方拍的,不同的是视场的大小。
确定焦距
显然,如果可以改变传感器大小,那么当焦距一样时,大一点的传感器自然FOV会更大。


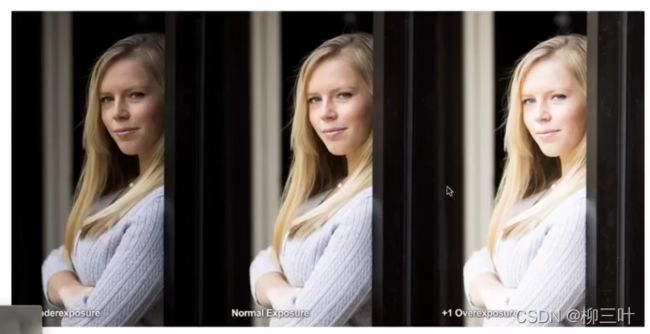
曝光(Exposure)
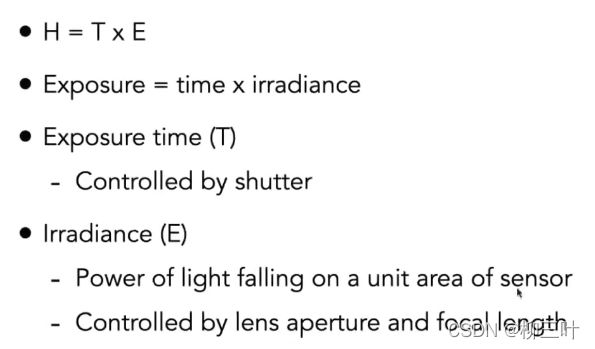
- H:曝光(Exposure);
- T:曝光时间(按住快门的时间);
- E:单位时间进来的光。
摄影中影响曝光的因素:
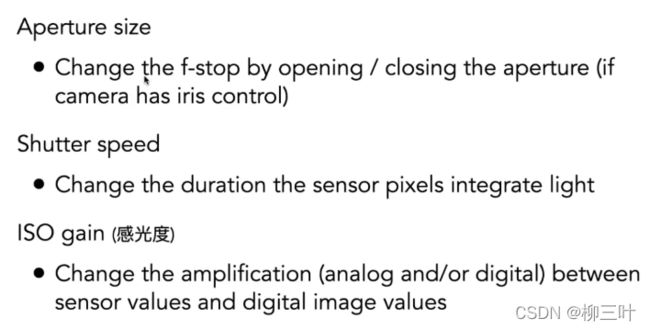
- 光圈大小(Apeture size)
光圈其实就是一种控制光线入射量的工具,是一种仿生学工具。模仿的是动物的瞳孔,在亮的地方光圈小,减少光的进入量,防止灼伤视网膜;在暗的地方光圈大,增加光的进入量,使图像尽量清楚。
而f-stop数则是用来控制光圈的大小,这个数后面再详细讲。 - 快门速度(Shutter speed)
快门开放的时间。 - 感光度(ISO gain)
是一个后期处理。是指在原来的图像上,乘以多少倍数。这样的效果是放大信号(变亮),但也同时放大了噪声。
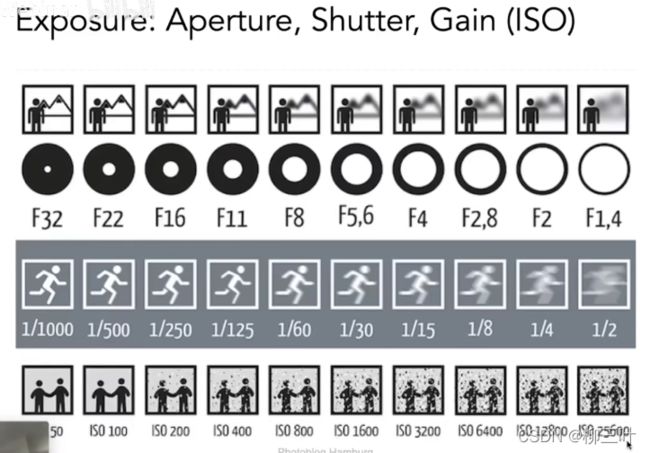
从上到下 三行 分别是 f-stop;shutter speed;iso gain 对曝光的影响.
ISO(Gain)
一种线性的增益。
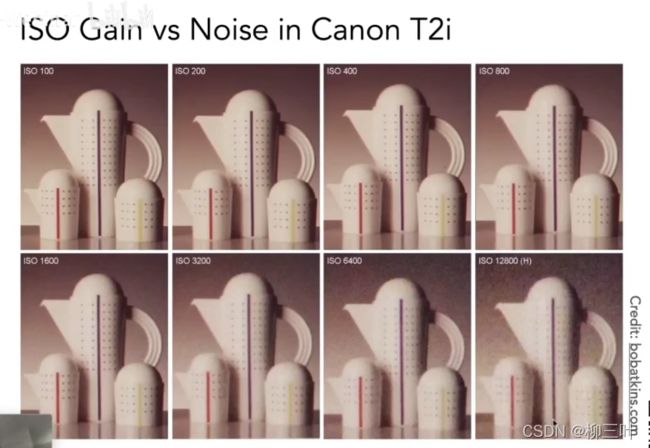
增加ISO可以增加曝光度,但是也会放大噪声
下图可以明显地观察到随着ISO的增大,噪点逐渐明显。
F-Number(F-Stop,曝光等级)
F-Number通常写成 FN 或者 F/N。不管怎么写,目前需要的只有N。
f数,也就是光圈直径的倒数(1/光圈直径),光圈越小f数越大
快门
机械快门(Physical Shutter)
运动模糊:快门打开的时间较长、物体运动速度较快或者手抖,会导致最终照片的模糊/扭曲。因为进入到快门的光都会被传感器感应并记录下来,然后传感器起到一个平均的作用,就会产生模糊。
可以说模糊在某种程度上能表现出速度。
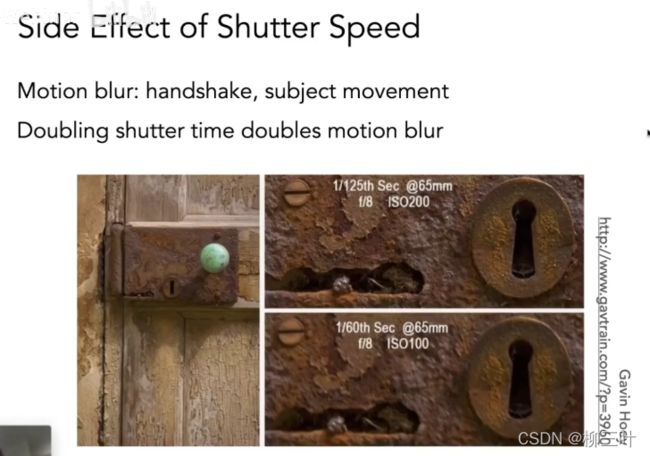
所以快门打开的时间短,进入的光线就少,时间也短,运动模糊的影响就小,就能有个比较清晰的动作,但是相对应的,亮度也就小。要解决亮度问题就只能调高ISO或者增加曝光时间。

运动模糊不总是坏事:
- 可以让人视觉上有快速运动的感觉,能捕捉到物体运动的轨迹。
- 在不同的时间对物体所在的位置进行了采样,这就与之前提到过的反走样(anti-aliasing)很相似。有着反走样的效果。
滚动快门(Rolling Shutter)
机械快门是机械控制快门的开关闭,所以必然存在着一个开关快门的速度,当拍摄物体速度快于打开快门的速度,拍摄就会出现问题。对于超高速的运动物体,不同时间的光会造成扭曲现象,称为Rolling Shutter。
开关快门如下图所示:

图像上不同的位置,记录的是不同时间快门进来的光。如下图飞机的扭曲螺旋桨:

表格中的每一列差不多都能达到相同的曝光度(f数是光圈直径的倒数),但是拍出来的照片效果并不一样:
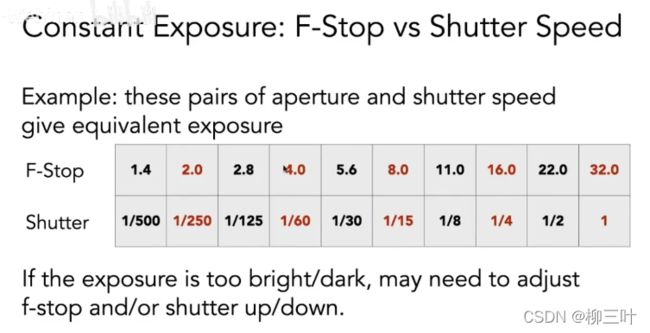
摄影师必须权衡景深(景深)和运动模糊的偏向。二者不可兼得。
Fast and Slow Photography
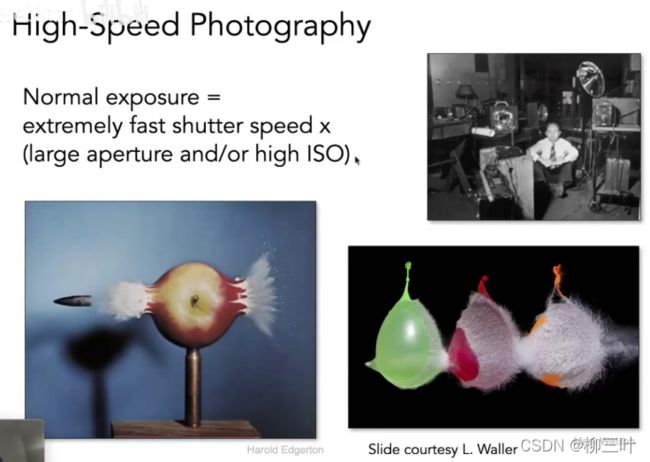
高速摄影(High-Speed Photography)
帧率高,快门时间受限需要用更大光圈或者高ISO。
可以用于拍摄比较有连续性的效果。

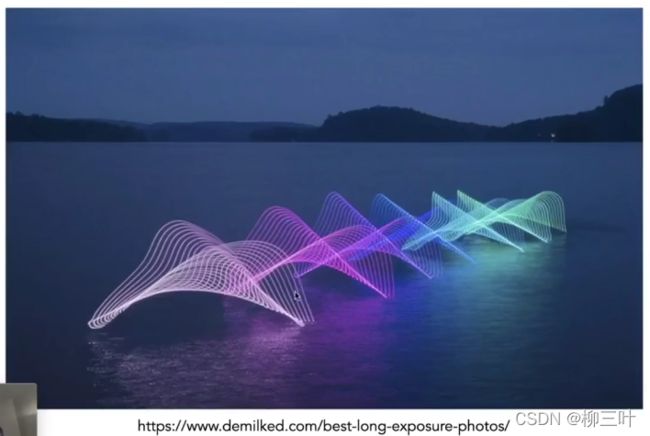
延时摄影(Long-Exposure Photography)
小光圈长时间,延时摄影效果,在摄影界被称为 “拉丝” 效果。(打开快门的时间内,物体进行剧烈的运动,都被记录了下来)


薄透镜近似(Thin Lens Approximation)
一般的相机都会配一组透镜:

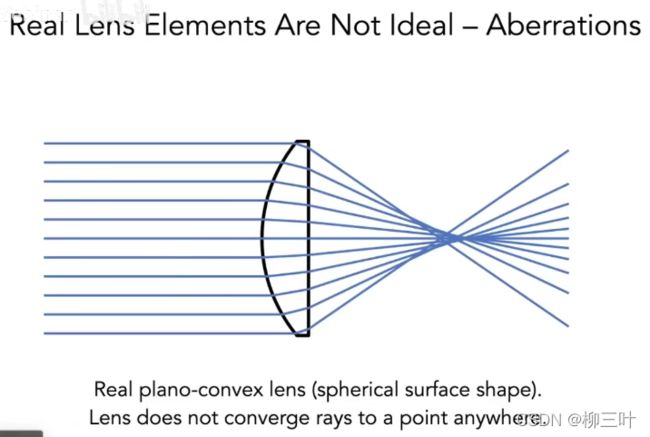
目前的相机都是用透镜组来构成相机镜头。真实的透镜并不是理想的,有些透镜无法将光线汇聚到一点。
理想的透镜应该像下图一样,所有的光线能聚焦于一点:
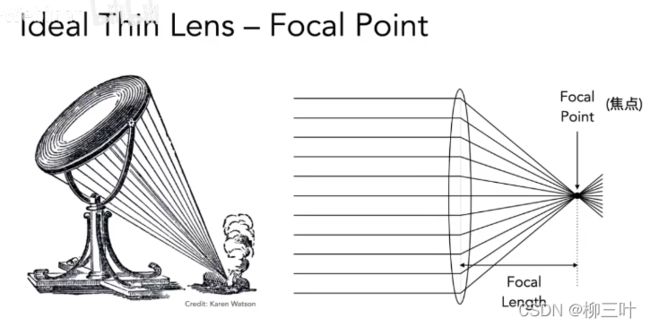
- 进入透镜的所有平行光线都会通过其焦点。
- 所有通过焦点的光线在通过透镜后将平行。
- 焦距可以任意改变(事实上,是的!)

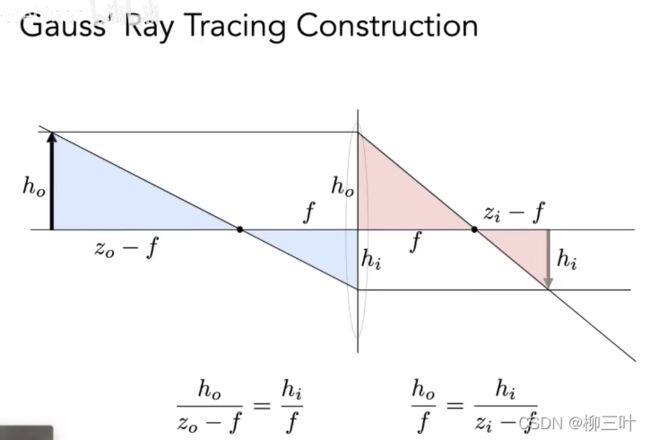
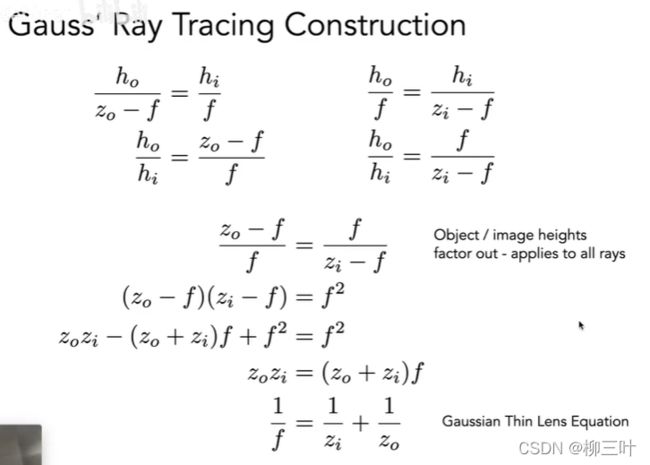
薄透镜公式(The Thin Lens Equation)

- 从任何一方想穿过棱镜中心,他的方向都不会发生改变。
- Zo:物距,物体到棱镜的垂直距离。
- Zi:像距:物体成像后的像到棱镜的垂直距离。
- f:透镜的焦距。
散焦模糊(Defocus Blur)
可用于解释景深。
为解释模糊,引入一个概念:Circle of Confusion(CoC)。
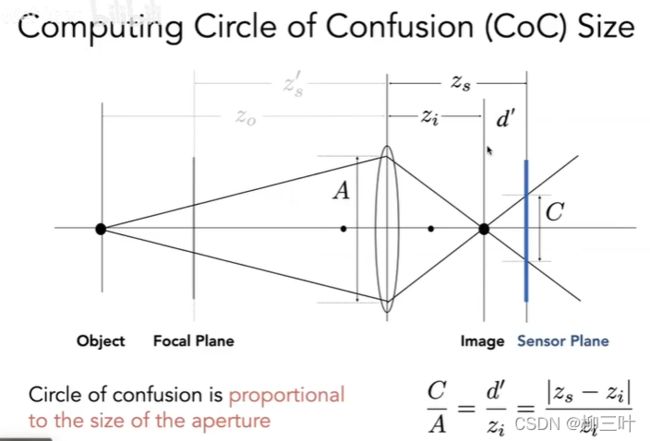
- Zi:像距;
- Zs:成的像与透镜的距离。
左边有一个Focal Plane,其上的东西会成像到Sensor Plane上;Object不在Focal Plane上,可能会聚焦在Image上,然后光线继续传播到Sensor Plane上形成一个圆,这时候在Sensor Plane上形成的圆就是CoC。
由CoC得知,看到的东西是否模糊,取决于光圈的大小,大光圈容易有模糊的效果。

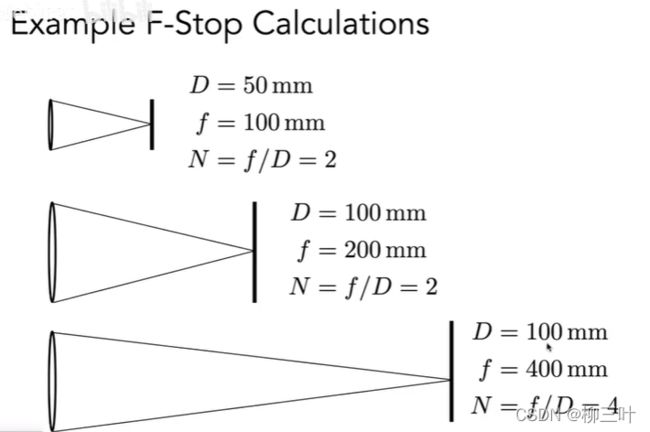
再次讨论F-Number
之前f数用光圈直径的倒数来描述是不准确的。
F数的定义应该是焦距除以光圈直径。
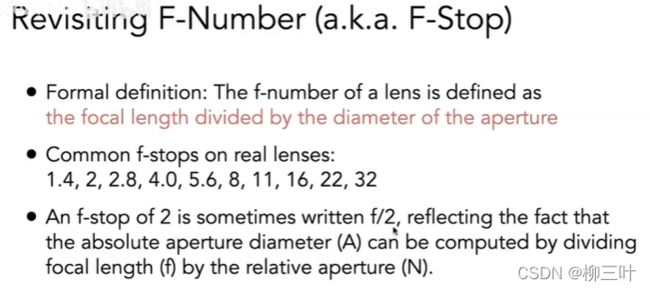
- N:f数
- f:焦距
- A:光圈直径
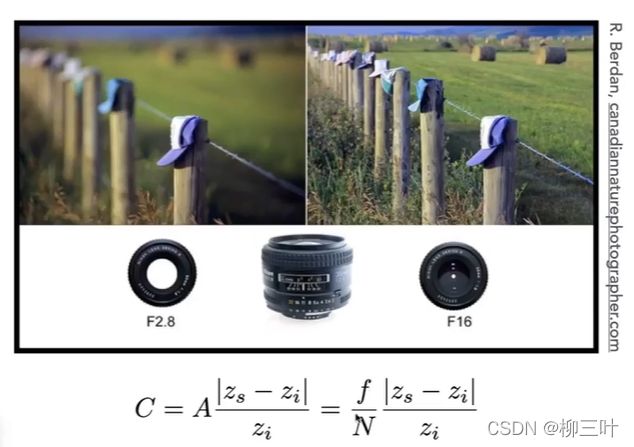
弥散圈(CoC)和f-stop有反比关系,效果表示如下:
光线追踪中使用理想透镜(Ray Tracing Ideal Thin Lenses)
以前的光线追踪中,相机是一个小点,往一个像素中心连,默认是小孔成像的原理。
模拟薄透镜可以做出景深的效果。
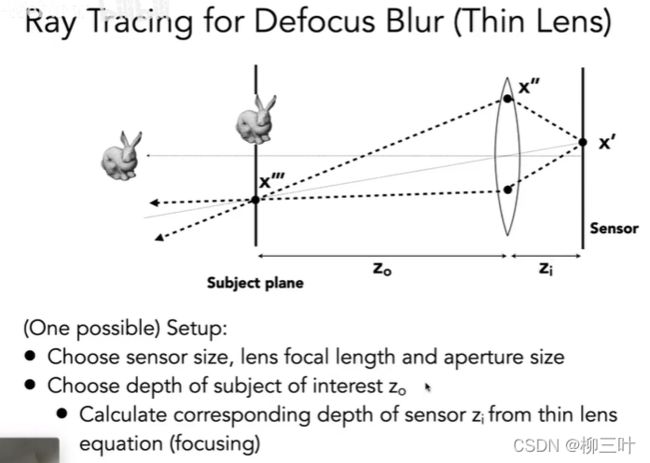
设置场景中的参数:
- 首先确定Sensor有一定的大小,也就是成像平面的区域,同时确定透镜本身的属性:焦距和光圈的大小。
- 定义透镜的位置,即物距Zo。(这步就可以知道像距是多少)
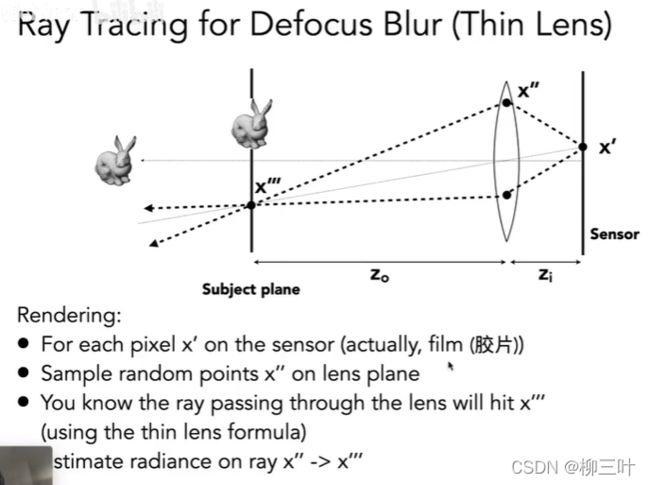
渲染:
- 对于sensor上的每一个像素点x‘;
- 在透镜上随机取样点x’’;
- 将上面两点连线后,根据透镜性质得知光线可以传播到x’";
- 估计x"到x"'光线上的radiance。
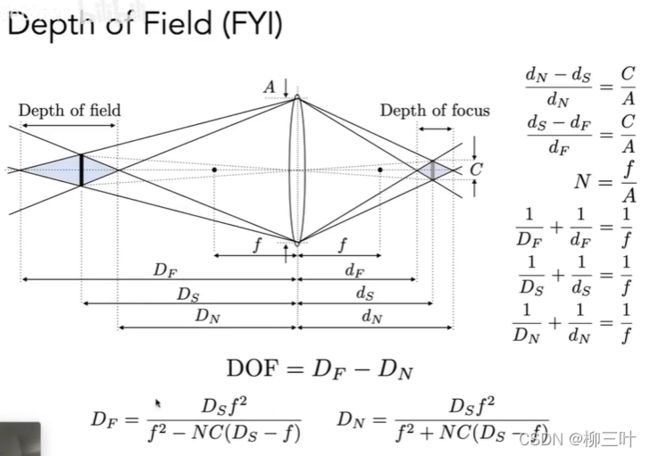
景深(Depth of Field)
下面两张图就是用的不同的光圈大小拍摄出来的照片,可以看见模糊的地方。
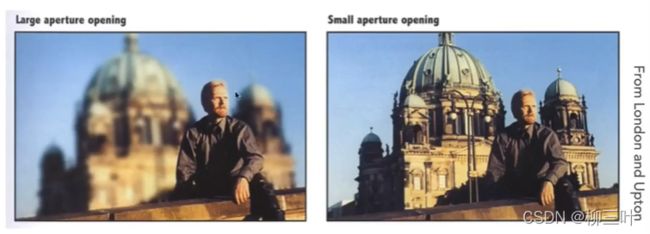
大的光圈对应大的CoC,得到的一个点会变成一个更大的圆,就会更模糊。
所以光圈的大小会影响模糊的范围。
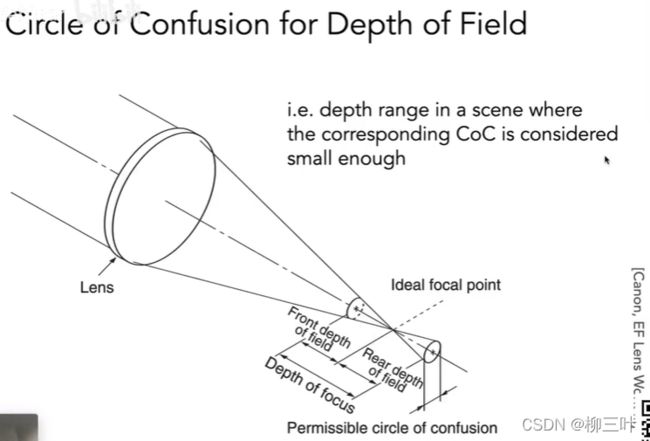
有光经过透镜(Lens),然后打到某个成像平面,在这个成像平面附近的一段距离区域内,都认为这个CoC足够小。
景深: 在这个场景中,有一段深度(景深),这段深度经过透镜之后,会在成像平面的附近形成一段区域,在这段区域内,认为CoC都是足够小的。
在某段区域内CoC很小的一个范围内对应的那个场景是清晰的。
CoC比像素小或者比较小,成像出来就是清晰的。