动手学深度学习v2笔记 —— 线性回归 + 基础优化算法
二 动手学深度学习v2 —— 线性回归 + 基础优化算法
目录:
- 线性回归
- 基础优化方法
1. 线性回归
总结
- 线性回归是对n维输入的加权,外加偏差
- 使用平方损失来衡量预测值和真实值的差异
- 线性回归有显示解
- 线性回归可以看作是单层神经网络
2. 基础优化方法
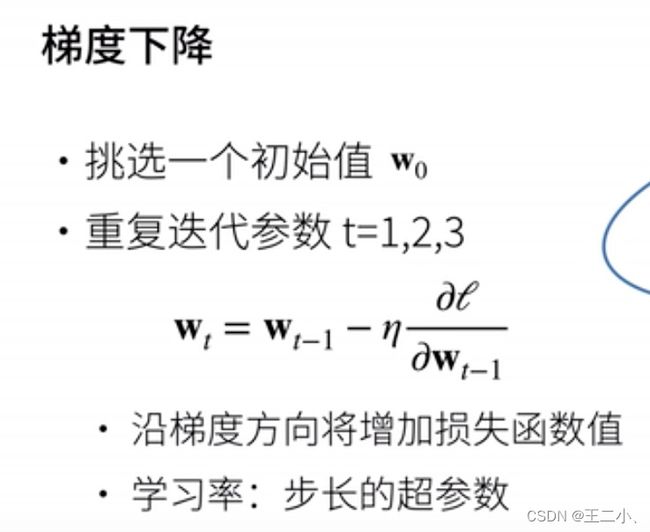
梯度下降
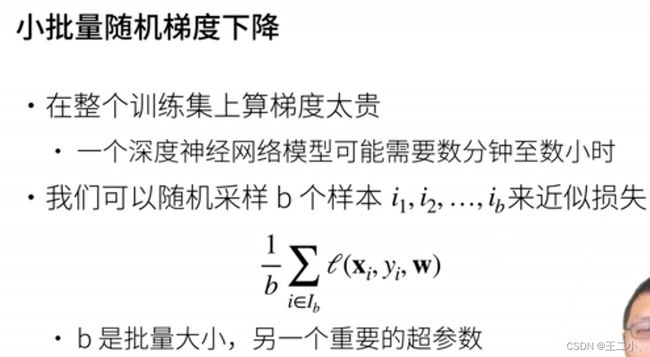
小批量随机梯度下降
3. 总结
- 梯度下降通过不断沿着反梯度方向更新参数求解
- 小批量随机梯度下降是深度学习默认的求解算法
- 两个重要的超参数是批量大小和学习率
4. 线性回归的从零开始实现
import torch
import random
def synthetic_data(w, b, num):
"生成 y = Xw + b + 噪声"
''' 根据带有噪声的线性模型构造一个人造数据集。 我们使用线性模型参数 = [2,−3.4]⊤
w=[2,−3.4]⊤、 = 4.2和噪声项ϵ生成数据集及其标签: = + + '''
X = torch.normal(0, 1, (num, len(w)))
y = torch.matmul(X, w) + b
y += torch.normal(0, 0.01, y.shape)
return X, y.reshape(-1, 1)
true_w = torch.tensor([2, -3.4])
true_b = 4.2
num_examples = 1000
batch_size = 10
features, labels = synthetic_data(true_w, true_b, num_examples)
def data_iter(batch_size, features, labels):
num_examples = len(features)
indices = list(range(num_examples))
random.shuffle(indices)
for i in range(0, num_examples, batch_size):
num_indices = torch.tensor(indices[i: min(i +
batch_size, num_examples)])
yield features[num_indices], labels[num_indices]
def linreg(X, w, b):
return torch.matmul(X, w) + b
def squared_loss(y_hat, y):
return (y_hat - y.reshape(y_hat.shape))**2/2
def sgd(params, lr, batch_size):
with torch.no_grad():
for param in params:
param -= lr * param.grad / batch_size
param.grad.zero_()
w = torch.normal(0, 0.01, size=(2, 1), requires_grad=True)
b = torch.zeros(1, requires_grad=True)
loss = squared_loss
net = linreg
lr = 0.03
epoches = 3
for epoch in range(epoches):
for X, y in data_iter(batch_size, features, labels):
l = loss(net(X, w, b), y)
l.sum().backward()
sgd([w, b], lr, batch_size)
with torch.no_grad():
train_l = loss(net(features, w, b), labels)
print(f'epoch: {epoch + 1}, loss {float(train_l.mean()):f}')
5. 线性回归的简洁实现
import torch
from d2l import torch as d2l
from torch.utils import data
true_w = torch.tensor([2, -3.4])
true_b = 4.2
features, labels = d2l.synthetic_data(true_w, true_b, 1000)
def load_array(batch_size, data_array, is_train=True):
dataset = data.TensorDataset(*data_array)
return data.DataLoader(dataset, batch_size, shuffle=is_train)
batch_size = 10
data_iter = load_array(batch_size, (features, labels))
from torch import nn
net = nn.Sequential(nn.Linear(2, 1))
net[0].weight.data.normal_(0, 0.01)
net[0].bias.data.fill_(0)
loss = nn.MSELoss()
trainer = torch.optim.SGD(net.parameters(), lr = 0.03)
num_epoches = 3
iter_temp = iter(data_iter)
for epoch in range(num_epoches):
for X, y in next(iter_temp):
l = loss(net(X), y)
l.backward()
trainer.step()
trainer.zero_grad()
l = loss(net(features), labels)
print(f'epoch {epoch + 1}, loss {l:f}')