Modbus tcp转ETHERCAT在Modbus软件中的配置方法
Modbus tcp和ETHERCAT是两种不同的协议,这给工业生产带来了很大的麻烦,因为这两种设备之间无法通讯。但是,捷米JM-ECT-TCP网关的出现,却为这个难题提供了解决方案。

JM-ECT-TCP网关能够连接到Modbus tcp总线和ETHERCAT总线中,实现两种不同协议设备之间的通讯。这个网关能够大大提高工业生产的效率和生产效益,让生产变得更加智能化。它不仅解决了设备之间无法通讯的问题,还大大降低了生产成本和维护费用。此外,JM-ECT-TCP网关还支持多种数据格式的传输,具有极高的兼容性和稳定性。
网关的 ETHERCAT 从站
1, 将网关 xml 文件拷贝到主站相应路径下:
![]()
2, 新建项目

3, 新建工程后,在下图中 Device 的位置,点击鼠标右键 Add New Item,添加 ETHERCAT 主站。

4, 主站建立后,添加 ETHERCAT 从站。

5, 添加后的从站,可以看到网关配置输入输出数据的页面。
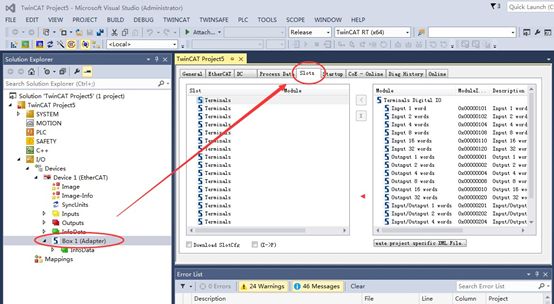
6, 列表的每一条配置选项,都可以添加到 Slot 中。

7, 注意:此处输入、输出长度的配置,要与网关的配置一致。
网关做为 MODBUS 从站
8, 打开 GW Config 软件,选择“Modbus 配置”,点击确定后进入设置界面。

9, 双击软件右侧设备列表中的“Modbus Master”,可以添加一个虚拟主站到项目中,双击软件右侧设备列表中的“Modbus Slave”,可以添加一个从站到此主站的 Modbus 总线中,添加后可以在软件的主窗口中看到 Modbus 总线中的所有站点,如下图:

10, 由于用户要配置的网关是 Modbus 从站,所以仅添加一个 Slave 即可。
11, 双击主窗口中的“Modbus Master”图标,弹出 Modbus 总线参数设置窗口,在这个窗口里,用户可以设置 Modbus 总线的运行参数如下图:

12, 双击主窗口的“Modbus Slave”,可以设置该从站的站地址。网关做为 Modbus 从站运行时,仅需要修改站地址即可,不需要配置报文。网关 Modbus 的读数据区(3xxxx 区)和写数据区(4xxxx 区)都是从地址 0 开始排序的。

13, 用户配置完成 Modbus 报文后,可以将配置下载到网关中。
启动网关的 Modbus 从站
14, 运行 ETHERCAT 主站软件,点击 Restart TwinCAT(Config Mode),使
ETHERCAT 主站软件运行。

15, 主站与网关建立 ETHERCAT 通讯后,可以在 TWINCAT 软件的 ONLINE 页面下看到“OP”状态,说明主站与网关成功建立 ETHERCAT 连接,同时网关 ETHERCAT 接口的指示灯由红灯变为黄灯。

16, 使用 Modbus Poll 软件做为主站,与网关的 P3 口连接进行测试。
17, 点击软件的菜单栏“Connection——Connect…”,设置正确的端口号,然后点击 OK,开始运行。如下图:

18, 点击软件的菜单栏“Setup——Read/Write Definition”,设置主站想要访问的数据区,注意 Slave ID 选择 2,如下图:

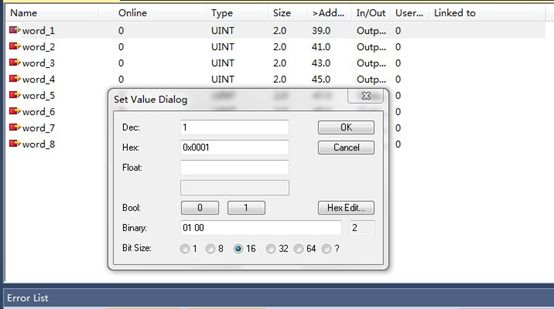
19, 在 ETHERCAT 主站软件上,在左侧项目树中点击第一条 Output,在主窗口中,右键单击某个数据,选择 Online Write,可以修改实时的数据值。

20, 将输出数据的第 1 个 word 赋值为 1(控制字=1),此时可以看到网关 P3 接口的 OK 灯开始闪烁,表示 Modbus-TCP 已经建立连接。
21, 测试数据:
22, 网关从 Modbus 主站获取数据存放在 4xxxx 区中,我们在 Modbus Poll 软件中,手动修改 4xxxx 寄存器的数值,如下图:

23, 可以在 TWINCAT 软件中监控到第一个上传数据,数据修改成功。

24, 在 TWINCAT 软件上手动修改一个 output 数据值,如下图:

25, 在 Modbus Poll 软件的 3xxx 区中可以监视到,数据已经读取成功。

26, 捷米JM-ECT-TCP网关还有许多其他的优点。它能够实现设备的远程控制和监控,大大提高了工业生产的智能化程度。而且,捷米网关还支持多种通讯方式,例如RS232、RS485、CAN等,具有极高的通讯灵活性和可扩展性。
27, JM-ECT-TCP网关的出现,无疑为工业生产带来了新的机遇和挑战。它不仅解决了设备之间无法通讯的问题,还提高了工业生产的智能化程度。但是,我们也需要注意到,随着技术的不断发展,我们面临的挑战也越来越多。