STM32MX配置EEPROM(AT24C02)------保姆级教程
————————————————————————————————————
⏩ 大家好哇!我是小光,嵌入式爱好者,一个想要成为系统架构师的大三学生。
⏩最近在开发一个STM32H723ZGT6的板子,使用STM32CUBEMX做了很多驱动,包括ADC、UART、RS485、EEPROM(IIC)、FLASH(SPI)等等。
⏩本篇文章对STM32CUBEMX配置RRPROM(AT24C02)做一个详细的使用教程。
⏩感谢你的阅读,不对的地方欢迎指正。
————————————————————————————————————
EEPROM
- AT24C02工作原理
- 实验环境
- MX配置
- 驱动代码
- 测试结果
AT24C02工作原理
引脚封装
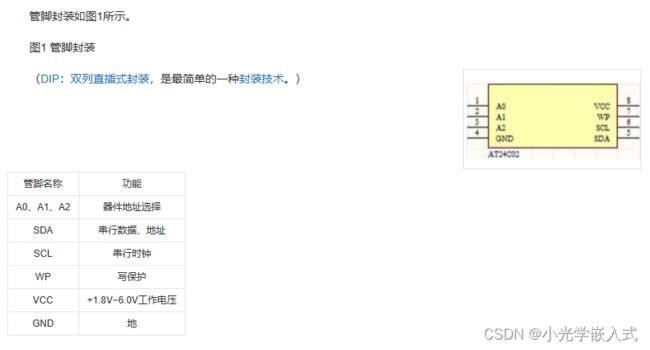
SCL 串行时钟
AT24C02串行时钟输入管脚用于产生器件所有数据发送或接收的时钟,这是一个输入管脚。
SDA 串行数据/地址
AT24C02 双向串行数据/地址管脚用于器件所有数据的发送或接收,SDA 是一个开漏输出管脚,可与其它开漏输出或集电极开路输出进行线或(wire-OR)。
A0、A1、A2 器件地址输入端
这些输入脚用于多个器件级联时设置器件地址,当这些脚悬空时默认值为0。当使用AT24C02 时最大可级联8个器件。如果只有一个AT24C02被总线寻址,这三个地址输入脚(A0、A1、A2 )可悬空或连接到Vss or GND。
WP 写保护
如果WP管脚连接到Vcc,所有的内容都被写保护只能读。当WP管脚连接到Vss or GND 或悬空允许器件进行正常的读/写操作。
具体原理可以参考
AT24C02芯片使用介绍
实验环境
- USB转串口
- AT24C02
- STM32H723ZGT6开发板
硬件连接:

我这里接的是PB8和PB9
MX配置
板子、时钟、调试之类的配置就不说了,具体可以看看这篇:
STM32CUBEMX配置ADC(多通道轮询)(STM32H7)–保姆级教程
这里只说一下IIC的具体配置
根据你的连接自己配置

我的引脚是PB8,PB9

驱动代码
at24C02.h
我使用两个共用体去存储浮点型和整形的数据,这是最简单的方法。
#ifndef AT24C02_H_
#define AT24C02_H_
#include "stm32H7xx_hal.h" //HAL库文件声明
#define AT24C02_ADDR_WRITE 0xA0 // 写命令
#define AT24C02_ADDR_READ 0xA1 // 读命令
#define ADDR_24LCxx_Write 0xA0 //AT24C02写地址
#define ADDR_24LCxx_Read 0xA1 //AT24C02读地址
#define BufferSize 256 //读写缓冲区大小
union float_union{
float float_write_dat; // 浮点数占4个字节
double double_write_dat; // 双精度浮点数占8个字节
uint8_t buf[8]; // 定义 8个字节 的空间
};
union int_union{
int int_dat; //整型数占四个字节
uint8_t buf[4]; //定义4个字节的空间
};
uint8_t At24c02_Write_Byte(uint16_t addr, uint8_t* dat); //AT24C02任意地址写一个字节数据
uint8_t At24c02_Read_Byte(uint16_t addr, uint8_t* read_buf);//AT24C02任意地址读一个字节数据
uint8_t At24c02_Write_Amount_Byte(uint16_t addr, uint8_t* dat, uint16_t size);// AT24C02任意地址连续写多个字节数据
uint8_t At24c02_Read_Amount_Byte(uint16_t addr, uint8_t* recv_buf, uint16_t size);//AT24C02任意地址连续读多个字节数据
#endif
at24c02.c
#include "at24c02.h"
#include "i2c.h"
/**
* @brief AT24C02任意地址写一个字节数据
* @param addr —— 写数据的地址(0-255)
* @param dat —— 存放写入数据的地址
* @retval 成功 —— HAL_OK
*/
uint8_t At24c02_Write_Byte(uint16_t addr, uint8_t* dat)
{
HAL_StatusTypeDef result;
result = HAL_I2C_Mem_Write(&hi2c1, AT24C02_ADDR_WRITE, addr, I2C_MEMADD_SIZE_8BIT, dat, 1, 0xFFFF);
HAL_Delay(5); // 写一个字节,延迟一段时间,不能连续写
return result;
}
/**
* @brief AT24C02任意地址读一个字节数据
* @param addr —— 读数据的地址(0-255)
* @param read_buf —— 存放读取数据的地址
* @retval 成功 —— HAL_OK
*/
uint8_t At24c02_Read_Byte(uint16_t addr, uint8_t* read_buf)
{
return HAL_I2C_Mem_Read(&hi2c1, AT24C02_ADDR_READ, addr, I2C_MEMADD_SIZE_8BIT, read_buf, 1, 0xFFFF);
}
/**
* @brief AT24C02任意地址连续写多个字节数据
* @param addr —— 写数据的地址(0-255)
* @param dat —— 存放写入数据的地址
* @retval 成功 —— HAL_OK
*/
uint8_t At24c02_Write_Amount_Byte(uint16_t addr, uint8_t* dat, uint16_t size)
{
uint8_t i = 0;
uint16_t cnt = 0; // 写入字节计数
HAL_StatusTypeDef result; // 返回是否写入成功
/* 对于起始地址,有两种情况,分别判断 */
if(0 == addr % 8)
{
/* 起始地址刚好是页开始地址 */
/* 对于写入的字节数,有两种情况,分别判断 */
if(size <= 8)
{
// 写入的字节数不大于一页,直接写入
result = HAL_I2C_Mem_Write(&hi2c1, AT24C02_ADDR_WRITE, addr, I2C_MEMADD_SIZE_8BIT, dat, size, 0xFFFF);
HAL_Delay(20); // 写完八个字节(最多八个字节),延迟久一点
return result;
}
else
{
// 写入的字节数大于一页,先将整页循环写入
for(i = 0; i < size/8; i++)
{
HAL_I2C_Mem_Write(&hi2c1, AT24C02_ADDR_WRITE, addr, I2C_MEMADD_SIZE_8BIT, &dat[cnt], 8, 0xFFFF);
// 一次写入了八个字节,延迟久一点
HAL_Delay(20); // 写完八个字节,延迟久一点
addr += 8;
cnt += 8;
}
// 将剩余的字节写入
result = HAL_I2C_Mem_Write(&hi2c1, AT24C02_ADDR_WRITE, addr, I2C_MEMADD_SIZE_8BIT, &dat[cnt], size - cnt, 0xFFFF);
HAL_Delay(20); // 写完八个字节(最多八个字节),延迟久一点
return result;
}
}
else
{
/* 起始地址偏离页开始地址 */
/* 对于写入的字节数,有两种情况,分别判断 */
if(size <= (8 - addr%8))
{
/* 在该页可以写完 */
result = HAL_I2C_Mem_Write(&hi2c1, AT24C02_ADDR_WRITE, addr, I2C_MEMADD_SIZE_8BIT, dat, size, 0xFFFF);
HAL_Delay(20); // 写完八个字节(最多八个字节),延迟久一点
return result;
}
else
{
/* 该页写不完 */
// 先将该页写完
cnt += 8 - addr%8;
HAL_I2C_Mem_Write(&hi2c1, AT24C02_ADDR_WRITE, addr, I2C_MEMADD_SIZE_8BIT, dat, cnt, 0xFFFF);
HAL_Delay(20); // 写完八个字节(最多八个字节),延迟久一点
addr += cnt;
// 循环写整页数据
for(i = 0;i < (size - cnt)/8; i++)
{
HAL_I2C_Mem_Write(&hi2c1, AT24C02_ADDR_WRITE, addr, I2C_MEMADD_SIZE_8BIT, &dat[cnt], 8, 0xFFFF);
HAL_Delay(20); // 写完八个字节,延迟久一点
addr += 8;
cnt += 8;
}
// 将剩下的字节写入
result = HAL_I2C_Mem_Write(&hi2c1, AT24C02_ADDR_WRITE, addr, I2C_MEMADD_SIZE_8BIT, &dat[cnt], size - cnt, 0xFFFF);
HAL_Delay(20); // 写完八个字节(最多八个字节),延迟久一点
return result;
}
}
}
/**
* @brief AT24C02任意地址连续读多个字节数据
* @param addr —— 读数据的地址(0-255)
* @param dat —— 存放读出数据的地址
* @retval 成功 —— HAL_OK
*/
uint8_t At24c02_Read_Amount_Byte(uint16_t addr, uint8_t* recv_buf, uint16_t size)
{
return HAL_I2C_Mem_Read(&hi2c1, AT24C02_ADDR_READ, addr, I2C_MEMADD_SIZE_8BIT, recv_buf, size, 0xFFFF);
}
main.c
//AT24C02
uint8_t WriteBuffer[BufferSize] = {0};//AT24C02写缓冲区
uint8_t ReadBuffer[BufferSize] = {0}; //AT24C02读缓冲区
//测试
// 单个字节 读写测试
uint8_t simple_write_dat = 0xa5; // 一个字节
uint8_t simple_recv_buf = 0;
if(HAL_OK == At24c02_Write_Byte(10, &simple_write_dat)){
printf("Simple data write success \r\n");
} else {
printf("Simple data write fail \r\n");
}
HAL_Delay(50); // 写一次和读一次之间需要短暂的延时
if(HAL_OK == At24c02_Read_Byte(10, &simple_recv_buf)){
printf("Simple data read success, recv_buf = 0x%02X \r\n", simple_recv_buf);
} else {
printf("Simple data read fail \r\n");
}
printf("--------------------- \r\n");
// 单个字节读写 测试结束
// 浮点数 读写测试
union float_union send_float_data; // 用来发送
union float_union rev_float_data; // 用来接收
union int_union send_int_data; //发送
union int_union rev_int_data; //接收
// 先测试第一个 浮点数
send_float_data.float_write_dat = 3.1415f;
if(HAL_OK == At24c02_Write_Amount_Byte(20, send_float_data.buf, 4)){
printf("Float data write success \r\n");
} else {
printf("Float data write fail \r\n");
}
HAL_Delay(50);
if(HAL_OK == At24c02_Read_Amount_Byte(20, rev_float_data.buf, 4)){
// 默认输出六位小数
printf("Float data read success, recv_buf = %f \r\n", rev_float_data.float_write_dat);
} else {
printf("Float data read fail \r\n");
}
// 测试第二个 双精度浮点数
send_float_data.double_write_dat = 3.1415f;
if(HAL_OK == At24c02_Write_Amount_Byte(20, send_float_data.buf, 8)){
printf("Double data write success \r\n");
} else {
printf("Double data write fail \r\n");
}
HAL_Delay(50);
if(HAL_OK == At24c02_Read_Amount_Byte(20, rev_float_data.buf, 8)){
// 最多15位小数
printf("Double data read success, recv_buf = %.15f \r\n", rev_float_data.double_write_dat);
} else {
printf("Double data read fail \r\n");
}
printf("--------------------- \r\n");
// 浮点数读写测试 测试结束
// 测试第三个 整形数
send_int_data.int_dat = 2147483647;
if(HAL_OK == At24c02_Write_Amount_Byte(30,send_int_data.buf, 4)){
printf("int data write success \r\n");
} else {
printf("int data write fail \r\n");
}
HAL_Delay(50);
if(HAL_OK == At24c02_Read_Amount_Byte(30, rev_int_data.buf, 4)){
printf("int data read success, recv_buf = %d \r\n", rev_int_data.int_dat);
} else {
printf("int data read fail \r\n");
}
printf("--------------------- \r\n");
// 整型数读写测试 测试结束
// 连续数据读写测试
uint8_t write_dat[22] = {0}; // 22个字节
uint8_t recv_buf[22] = {0};
printf("正在往数组中填充数据... \r\n");
for(int i = 0; i < 22; i++){
write_dat[i] = i;
printf("%02X ", write_dat[i]);
}
printf("\r\n 数组中数据填充完毕... \r\n");
if(HAL_OK == At24c02_Write_Amount_Byte(0, write_dat, 22)){
printf("24c02 write success \r\n");
} else {
printf("24c02 write fail \r\n");
}
HAL_Delay(50); // 写一次和读一次之间需要短暂的延时
if(HAL_OK == At24c02_Read_Amount_Byte(0, recv_buf, 22)){
printf("read success \r\n");
for(int i = 0; i < 22; i++) {
printf("0x%02X ", recv_buf[i]);
}
} else {
printf("read fail\r\n");
}
// 连续数据读写 测试结束
测试结果

可以看到存取单个字节、多个字节、浮点数、双精度浮点数、整型数都没有问题。