已知载具(矩形)的中心点坐标、长、宽和倾斜角度,求载具(矩形)四个边界点
已知载具(矩形)的中心点坐标、长、宽和倾斜角度,求载具(矩形)四个边界点
- 思路方法
- 代码实现
- 实验结果
思路方法
1、以中心点的坐标,求不旋转的情况下矩形的四个顶点坐标;
2、再求按逆时针旋转目标角度后的四个点坐标;
代码实现
#include 实验结果
matlab绘制矩形的代码为:
[Points,txt1,raw1]=xlsread('C:\Users\YW\source\repos\ConsoleApplication10\ConsoleApplication10\points.csv') ;
Points=Points';
%绘制中心点,以实心圆形代替
rectangle('Position',[Points(1,1),Points(2,1),1,1],'Curvature',[1,1], 'FaceColor','r');
hold on;
%绘制矩形
X=Points(1,2:6);
Y=Points(2,2:6);
plot(X,Y,'g','LineWidth',0.5);
hold on;
title('载具车矩形图');
xlabel('x坐标');ylabel('y坐标');axis normal
代码运行结果:
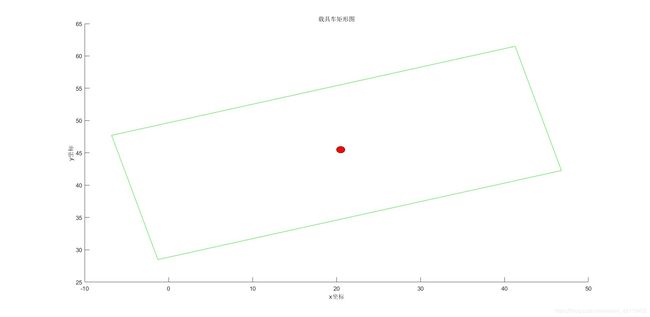
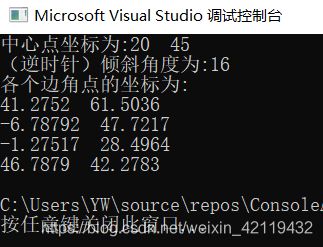 矩形的形状(红色圆为矩形中心点):
矩形的形状(红色圆为矩形中心点):
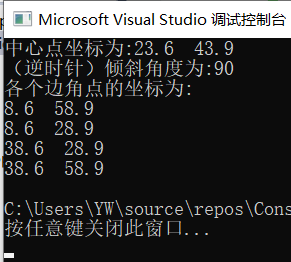
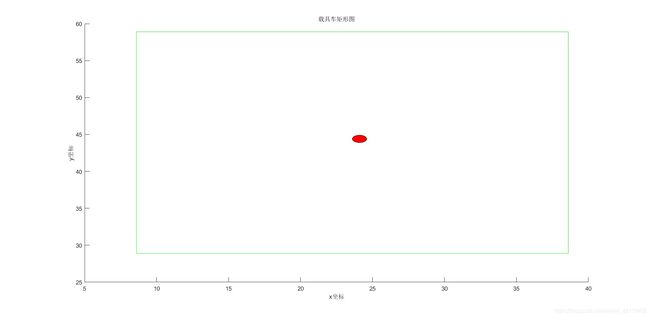
 其它测试(长宽都为30):
其它测试(长宽都为30):
本博文完,感谢您的阅读,望您不吝点赞之手,再次感谢。