步进驱动器简单接线说明书
目录
实物图
接口功能说明
1,控制信号接口
2,功率端口
3,状态指示
1, 控制信号采用单端接线方式时,接线图如下图所示:
2,控制信号采用差分接线方式时,接线图如下图所示:
3, 控制信号时序图
4,接线要求
五,电流,细分,及半流与参数学习设置。
1,电流设定
2,半流设定
3,细分设定
4参数自整定功能
实物图

如上图就是一款通用型的步进驱动器
接口功能说明
1,控制信号接口
| 名称 |
说明 |
| PUL+ |
脉冲控制信号:脉冲上升沿有效;PUL-高电平时4~5V,低电平时 0~0.5V。 为了可靠响应脉冲信号,脉冲宽度应大于 1.2μs。如采用+12V 或+24V 时需串电阻。 |
| PUL- |
|
| DIR+ |
当输入方式为脉冲+方向时,作方向信号:高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少 5μs 建立。电机的初始运行方向与电机的接线有关,互换任一相绕组 (如A+、A-交换)可以改变电机初始运行的方向,DIR-高电平时4~5V,低电平时0~0.5V。如采用+12V 或+24V 时需串电阻。 当输入方式为双脉冲时,作反向脉冲信号:其特性 PUL+,PUL-相同 当输入方式为编码器跟随时,作B相脉冲信号:其特性 PUL+,PUL-相同 |
| DIR- |
|
| ENA+ |
使能信号:此输入信号用于使能或禁止。ENA+ 接+5V,ENA-接低电平(或内部 光耦导通)时,驱动器将切断电机各相的电流使电机处于自由状态,此时步进 脉冲不被响应。当不需用此功能时,使能信号端悬空即可。 |
| ENA- |
2,功率端口
| 名称 |
说明 |
| V- |
输入电源负 |
| V+ |
输入电源正,输入电压为18-50V |
| A+ |
电机A相绕组正端 |
| A- |
电机A相绕组负端 |
| B+ |
电机B相绕组正端 |
| B- |
电机B相绕组负端 |
3,状态指示
绿色 LED 为电源指示灯,当驱动器接通电源时,该 LED 常亮;当驱动器切断电源时,该
LED 熄灭。红色 LED 为故障指示灯,当出现故障时,该指示灯根据故障类型,以0.2秒循环闪烁设定的次数.然后以1秒间隔继续重复以0.2秒循环闪烁设定的次数。直到故障被用户清除,红色 LED常灭。
故障类型对应的闪烁次数如下表:
| 闪烁次数 |
故障类型 |
| 1 |
过电流 |
| 2 |
电源电压过低 |
| 3 |
电源电压过高 |
| 4 |
相位出错 |
| 5 |
参数调谐与学习识别过程中出错 |
| 其它 |
硬件故障,具体类型供厂商识别 |
四, 控制信号接线
1, 控制信号采用单端接线方式时,接线图如下图所示:
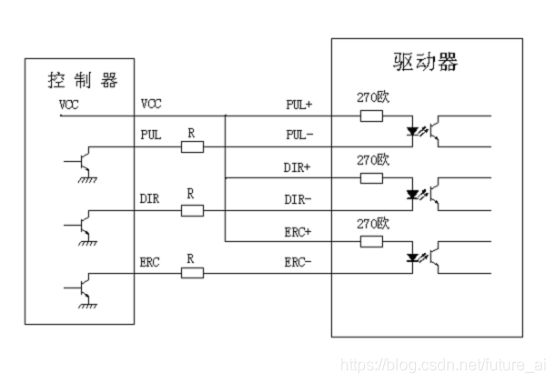
单端共阳接线方式(控制器集电极开路输出)
注意:VCC为5V时,R短路;
VCC为12V时,R为1K,大于0.125W电阻;
VCC为24V时,R为2K,大于0.125W电阻;
电阻必须接在控制信号端。
2,控制信号采用差分接线方式时,接线图如下图所示:

差分接线方式(控制器差分输出)
3, 控制信号时序图

控制信号时序图
注释
1)T0: ENA(使能信号)应提前 DIR 至少 5mS,确定为高。通常ENA+和 ENA-悬空。
2)T1:DIR 至少提前PUL 下降沿 3μs。
3)T2:脉冲宽度至少不小于 1.0μs。
4)T3:低电平宽度不小于于 1.0μs。
4,接线要求
1)为了防止驱动器受干扰,建议控制信号采用屏蔽电缆线,并且屏蔽层与地线短接,除特殊要求外,控制信号电缆的屏蔽线单端接地:屏蔽线的上位机一端接地,屏蔽线的驱动器一端悬空。同一机器内只允许在同一点接地,如果不是真实接地线,可能干扰严重,此时屏蔽层不接。
2)脉冲和方向信号线与电机线不允许并排包扎在一起,最好分开至少 10cm 以上,否则电机噪声容易干扰脉冲方向信号引起电机定位不准,系统不稳定等故障。
3)如果一个电源供多台驱动器,应在电源处采取并联连接,不允许先到一台再到另一台链状式连接。
4)严禁带电拔插驱动器强电端子,带电的电机停止时仍有大电流流过线圈,拔插端子将导致巨大的瞬间感生电动势将烧坏驱动器。
5)严禁将导线头加锡后接入接线端子,否则可能因接触电阻变大而过热损坏端子。
6)接线线头不能裸露在端子外,以防意外短路而损坏驱动器。
五,电流,细分,及半流与参数学习设置。
驱动器采用八位拨码开关设定细分精度、动态电流、静止半流以及实现电机参数学习与PID整定。八位拨码开关详细描述如下:
电流设定(Sw1-Sw3) 半流设定 (Sw4) 细分设定(Sw5-Sw8) 参数学习开关(Sw8)
| Sw1 |
Sw2 |
Sw3 |
Sw4 |
Sw5 |
Sw6 |
Sw7 |
Sw8 |
1,电流设定

2,半流设定
半流可用 SW4 拨码开关设定,off 表示电机静止电流设为运行电流的一半,on 表示电机静止电流与运行电流相同。一般用途中应将 SW4 设成 off,使得电机和驱动器的发热减少,可靠性提高。脉冲串停止后约 1秒(此值由软件可改)左右电流自动减至一半左右,根据公式W=I2Rt,I为绕组电流R为绕组电阻,当进入半流后 W=(0.5*I) 2Rt=0.25*I2Rt,发热量理论上减少75%
3,细分设定

当 SW5、SW6、SW7、SW8都为 on 时,驱动器细分数由内部给定,内部给定值可通过RS232通信由上位软件修改,最小为1,最大为65535,内部给定值出厂默认为:4细分,即200pulse/Rev;
4参数自整定功能
若 SW8 在 1 秒之内往返拨动一次,驱动器便可自动完成电机参数学习和PID参数整定;在新接或更新电机、电源供电电压条件发生变化时请重新学习参数,否则,电机可能运行效果不理想或甚至不正常运行。参数学习阶段,脉冲输入,及方向改变将无效。
由于拔码开关比较小,对于手指比较粗的操作人员要在1秒钟内拔动一次有时变得困难,因此,在设计驱动器软件时采用最右端拔码开关(SW8)作为学习触发开关,方便右手操作(大部分人右手比较灵活),触发参数学习推荐方法如下:如果SW8处于ON时将拔到OFF位置,然后用右手食指指甲碰在SW8开关上,然后轻轻晃动两下,电动发出调谐声音,调完后红色LED将会亮一下,表示完成,如果未能触发,则把晃动的力度稍大些,直至触发成功。参数学习完成后,要恢复SW8之前的状态.