正点原子HAL库入门1~GPIO
探索者F407ZGT6(V3)

理论基础
IO端口基本结构
F4/F7/H7系列的IO端口
- F1在输出模式,禁止使用内部上下拉
F4/F7/H7在输出模式,可以使用内部上下拉 - 不同系列IO翻转速度不同
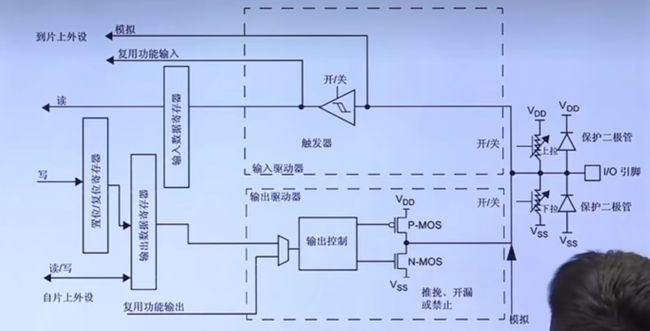
F1系列的IO端口

施密特触发器:将非标准方波,整形为方波
- 当输入电压高于正向值电压,输出为高;
- 当输入电压低于负向值电压,输出为低;
- 当输入在正负向值电压之间,输出不改变

MOS管:压控型元件,控制栅源电压(Vgs = Vg - Vs)实现导通/关闭
- P导通:Vgs<0
- N导通:Vgs>0
GPIO八种模式
| GPIO八种模式 | 特点及应用 |
|---|---|
| 输入浮空 | 输入用,完全浮空,空闲时(高阻态)状态由外部环境决定 |
| 输入上拉 | 输入用,空闲时呈现高电平 |
| 输入下拉 | 输入用,空闲时呈现低电平 |
| 模拟功能 | 输入用, ADC、 DAC |
| 开漏输出 | 输出用,不能输出高电平(除非有上拉),软件IIC的SDL、SCL等 |
| 开漏式复用功能 | 输出用,同上,由其他外设控制输出 |
| 推挽输出 | 通用输出,可输出高低电平,驱动能力强,25mA (max) |
| 推挽式复用功能 | 输出用,同上,由其他外设控制输出 |
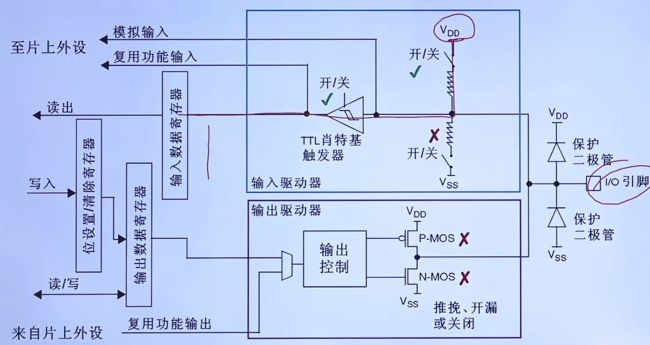
输入浮空
上拉电阻关闭;下拉电阻关闭;施密特触发器打开;双MOS管不导通

输入上拉
上拉电阻打开;下拉电阻关闭;施密特触发器打开;双MOS管不导通
输入下拉
上拉电阻关闭;下拉电阻打开;施密特触发器打开;双MOS管不导通

模拟功能
上拉电阻关闭;下拉电阻关闭;施密特触发器关闭;双MOS管不导通

开漏输出
上拉电阻关闭;下拉电阻关闭;施密特触发器打开;P-MOS管始终不导通
向ODR对应位,写0则N-MOS管导通,写1则N-MOS管不导通

开漏式复用功能
上拉电阻关闭;下拉电阻关闭;施密特触发器打开;P-MOS管始终不导通

推挽输出
上拉电阻关闭;下拉电阻关闭;施密特触发器打开
向ODR对应位,写0则N-MOS管导通,写1则P-MOS管导通

推挽式复用功能
上拉电阻关闭;下拉电阻关闭;施密特触发器打开

实验
实验工程资源
实验工程资源
LED0闪烁
led.h
#ifndef __LED_H
#define __LED_H
#include "./SYSTEM/sys/sys.h"
/* Íⲿ½Ó¿Úº¯Êý*/
void led_init(void); /* ³õʼ»¯ */
#endif
led.c
#include "./BSP/LED/led.h"
void led_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
__HAL_RCC_GPIOF_CLK_ENABLE(); //PF9
gpio_init_struct.Pin = GPIO_PIN_9;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP;
gpio_init_struct.Pull = GPIO_PULLUP;
gpio_init_struct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOF,&gpio_init_struct);
HAL_GPIO_WritePin(GPIOF,GPIO_PIN_9,GPIO_PIN_SET);//Initialize dark
}
stm32f4xx_hal_gpio.h
#define GPIO_MODE_INPUT MODE_INPUT /*!< Input Floating Mode */
#define GPIO_MODE_OUTPUT_PP (MODE_PP | MODE_OUTPUT) /*!< Output Push Pull Mode */
#define GPIO_MODE_OUTPUT_OD (MODE_OD | MODE_OUTPUT) /*!< Output Open Drain Mode */
#define GPIO_MODE_AF_PP (MODE_PP | MODE_AF) /*!< Alternate Function Push Pull Mode */
#define GPIO_MODE_AF_OD (MODE_OD | MODE_AF) /*!< Alternate Function Open Drain Mode */
#define GPIO_MODE_ANALOG MODE_ANALOG /*!< Analog Mode */
#define GPIO_MODE_IT_RISING (EXTI_MODE | GPIO_MODE_IT | RISING_EDGE) /*!< External Interrupt Mode with Rising edge trigger detection */
#define GPIO_MODE_IT_FALLING (EXTI_MODE | GPIO_MODE_IT | FALLING_EDGE) /*!< External Interrupt Mode with Falling edge trigger detection */
#define GPIO_MODE_IT_RISING_FALLING (EXTI_MODE | GPIO_MODE_IT | RISING_EDGE | FALLING_EDGE) /*!< External Interrupt Mode with Rising/Falling edge trigger detection */
#define GPIO_MODE_EVT_RISING (EXTI_MODE | GPIO_MODE_EVT | RISING_EDGE) /*!< External Event Mode with Rising edge trigger detection */
#define GPIO_MODE_EVT_FALLING (EXTI_MODE | GPIO_MODE_EVT | FALLING_EDGE) /*!< External Event Mode with Falling edge trigger detection */
#define GPIO_MODE_EVT_RISING_FALLING (EXTI_MODE | GPIO_MODE_EVT | RISING_EDGE | FALLING_EDGE) /*!< External Event Mode with Rising/Falling edge trigger detection */
- GPIO_MODE_INPUT: 输入浮空模式,该引脚可以作为输入使用,但其输出值是不确定的。
- GPIO_MODE_OUTPUT_PP 和 GPIO_MODE_AF_PP: 推挽输出模式,这种模式下,引脚始终是输出高电平或低电平,除非明确要求改变。
- GPIO_MODE_OUTPUT_OD 和 GPIO_MODE_AF_OD: 开漏输出模式,这种模式下,引脚可以输出高电平或低电平,但当输出高电平时,它实际上是在请求一个低电平。
- GPIO_MODE_ANALOG: 模拟模式,该引脚可以读取模拟信号。
- GPIO_MODE_IT_RISING, GPIO_MODE_IT_FALLING, 和 GPIO_MODE_IT_RISING_FALLING: 外部中断模式,在这种模式下,当引脚的电平发生改变时(上升沿、下降沿或者两者都发生),会触发一个中断。
- GPIO_MODE_EVT_RISING, GPIO_MODE_EVT_FALLING, 和 GPIO_MODE_EVT_RISING_FALLING: 外部事件模式,在这种模式下,当引脚的电平发生改变时(上升沿、下降沿或者两者都发生),会触发一个事件,但不会中断程序流程。
main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
int main(void)
{
HAL_Init(); /* Initialize HAL lib*/
sys_stm32_clock_init(336, 8, 2, 7); /* set clock 168Mhz */
delay_init(168); /* delay initialize */
led_init(); /* LED initialize */
while(1)
{
// way1
// HAL_GPIO_WritePin(GPIOF,GPIO_PIN_9,GPIO_PIN_RESET); /* LED0 on */
// delay_ms(200);
// HAL_GPIO_WritePin(GPIOF,GPIO_PIN_9,GPIO_PIN_SET); /* LED0 off */
// delay_ms(200);
//way2
HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_9); //reverse
delay_ms(200);
}
}
跑马灯
按键控制LED0
led.h
#ifndef __LED_H
#define __LED_H
#include "./SYSTEM/sys/sys.h"
void led_init(void);
#endif
led.c
#include "./BSP/LED/led.h"
void led_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
__HAL_RCC_GPIOF_CLK_ENABLE(); //PF9
gpio_init_struct.Pin = GPIO_PIN_9;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP;
gpio_init_struct.Pull = GPIO_PULLUP;
gpio_init_struct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOF, &gpio_init_struct);
HAL_GPIO_WritePin(GPIOF,GPIO_PIN_9,GPIO_PIN_SET);//Initialize dark
}
key.h
#ifndef __KEY_H
#define __KEY_H
#include "./SYSTEM/sys/sys.h"
void key_init(void);
uint8_t key_scan(void);
#endif
key.c
#include "./BSP/KEY/key.h"
#include "./SYSTEM/delay/delay.h"
void key_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
__HAL_RCC_GPIOE_CLK_ENABLE(); //PE2
gpio_init_struct.Pin = GPIO_PIN_2;
gpio_init_struct.Mode = GPIO_MODE_INPUT;
gpio_init_struct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOE, &gpio_init_struct);
}
uint8_t key_scan(void)
{
if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_2)==0)
{
delay_ms(10); //去除抖动
if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_2)==0)
{
while(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_2)==0);
return 1; //yes
}
}
return 0; //no
}
main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/KEY/key.h"
int main(void)
{
HAL_Init(); /* Initialize HAL lib*/
sys_stm32_clock_init(336, 8, 2, 7); /* set clock 168Mhz */
delay_init(168); /* delay initialize */
led_init(); /* LED initialize */
key_init();
while(1)
{
if(key_scan())
{
HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_9); //reverse
}
else
{
delay_ms(10);
}
}
}