利用线程池多线程并发实现TCP两端通信交互,并将服务端设为守护进程
文章目录
- 实现目标
- 实现步骤
- 封装日志类
- 封装线程池
-
- 封装线程
- 封装锁
- 封装线程池
- TCP通信的接口和注意事项
-
- accept
- TCP
-
- 封装任务
- 客户端
-
- Client.hpp
- Client.cc
- 服务端
-
- Server.hpp
- Server.cc
- 实现效果
- 守护进程
-
- 服务端守护进程化
实现目标
利用线程池多线程并发实现基于TCP通信的多个客户端与服务端之间的交互,客户端发送数据,服务端接收后处理数据并返回。服务端为守护进程
实现步骤
- 封装一个记录日志的类,将程序运行的信息保存到文件
- 封装线程类、服务端处理任务类以及将锁进行封装,为方便实现线程池
- 实现服务端,使服务端能接收客户端所发来的数据,处理数据后返回。服务端采用多线程并发处理
- 封装守护进程方法,使服务端为守护进程
- 实现客户端,可以向服务端发送数据,并接收到服务端发送回来的数据
封装日志类
将程序运行的信息保存到指定文件,例如创建套接字成功或者失败等信息。以【状态】【时间】【信息】的格式保存。
状态可分为五种:“DEBUG”,“NORMAL”,“WARNING”,“ERROR”,“FATAL”
日志类保存的信息需带有可变参数
#pragma once
#include 封装线程池
封装线程
将线程的创建,等待封装成类的成员函数。不再需要单个的条用线程库接口,以对象的方式创建。
需要注意:在类里面的线程回调方法必须设为static类型,而静态的方法是不能访问类内成员的,因此传给回调函数的参数需要将整个对象传过去,通过对象来获取类内成员
#pragma once
#include 封装锁
同样的为了不再需要一直调用系统接口,可以将整个方法封装成类,通过类的对象实现加锁过程
#pragma once
#include 封装线程池
在类里面的线程回调方法必须设为static类型,而静态的方法是不能访问类内成员的,因此传给回调函数的参数需要将整个对象传过去,通过对象来获取类内成员。
线程池需要实现为单例模式:
- 第一步就是把构造函数私有,再把拷贝构造和赋值运算符重载delete
- 在设置获取单例对象的函数的时候,注意要设置成静态成员函数,因为在获取对象前根本没有对象,无法调用非静态成员函数
- 可能会出现多个线程同时申请资源的场景,所以还需要一把锁来保护这块资源,而这把锁也得设置成静态,因为单例模式的函数是静态的
#pragma once
#include "Thread.hpp"
#include "log.hpp"
#include "Lock.hpp"
#include TCP通信的接口和注意事项
为了实现TCP版的通信,首先来了解一下相关接口和注意事项
- TCP需要在通信前先创建链接,因此在TCP没有链接之前其创建的套接字并不是用来通信的,而是用来监听的。一旦创建链接成功后,才会返回一个用来通信的套接字
- TCP时面向字节流的,因此其通信就是往文件上IO,因此不用指定的调用某接口去完成,直接用文件接口读写就可以完成
accept
#include 这就是用来创建链接的接口
参数一为负责监听的套接字
参数二就是socket的结构体
参数三为结构体的大小
返回值,成功创建链接之后会返回一个值,这个值就是负责通信的套接字,也就是后面利用文件通信的文件描述符
TCP
封装任务
因为上述说到TCP是可以直接使用文件操作来完成通信的,那么也就是说其通信根本就用不到其他的成员了,只需要知道一个套接字即可。那么这个方法就可以不放在类内,因为这就是线程最后的执行目的,因此可以将这个任务单独放到一个头文件中。因为线程池是一个模板类,则可以封装一个任务类。
#pragma once
#include 客户端
客户端不需要显示的绑定端口号,而是由操作系统随机去绑定。TCP的客户端也不需要监听,因为并没有去主动链接客户端,所以不需要accept。TCP的客户端只需要向服务端发起链接请求
Client.hpp
#pragma once
#include Client.cc
#include "Client.hpp"
#include 服务端
那么对于服务端而言,必须要显式的去绑定端口号。则创建的套接字并不是负责通信的。创建好套接字和绑定完网络信息后,需要设置创建的套接字为监听状态。和UDP一样,服务端是不能指定IP的.
还需要注意的是:因为封装的线程池是单例模式,所以不需要创建对象,直接调用静态对象去调用类方法即可
步骤可分为:
- 创建监听套接字
- 绑定网络信息
- 设置套接字为监听状态
- 获取链接,得到通信的套接字
- 通信
- 关闭不需要的套接字
Server.hpp
#pragma once
#include "Task.hpp"
#include "ThreadPool.hpp"
#include Server.cc
#include "Server.hpp"
#include "daemon.hpp"
#include 实现效果

可以看到多个客户端同时访问也没有问题,并且所对应的套接字也就是文件描述符也不一样。
守护进程
守护进程是一种特殊的孤儿进程,其运行于后台,生存期较长并且独立与终端周期性的执行任务或者等待处理任务
进程分为前台运行和后台运行,每一个进程都会属于一个会话组里。每一个会话组都有且只有能一个前台进程。像上述的服务端,当运行服务端时,操作系统会将其分到含有bash的会话组内,并且将服务端置为前台任务进程,因此服务端运行时bash把放置后台这也就是为什么用户不能再bash继续输入命令的原因。
每一个会话组都会有一个组长,一般而言在bash中输入命令执行的进程都会分到bash的会话组内,这个会话组的组长即为bash。可以通过查看进程的SID确认进程的会话组
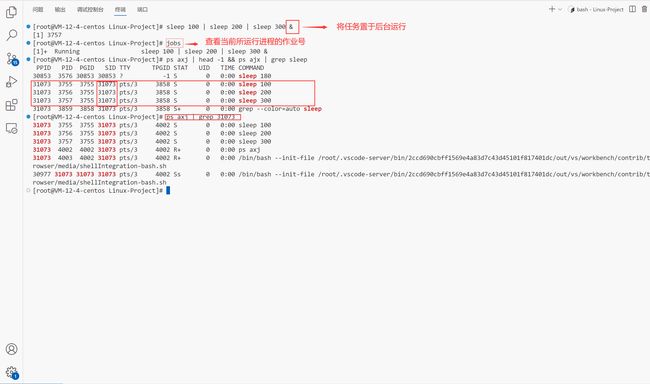
可以看到上述图片中运行了三个进程并置于后台,他们的SID也就是会话组都是一样的。那么如果将他们置于前台运行会发生什么呢
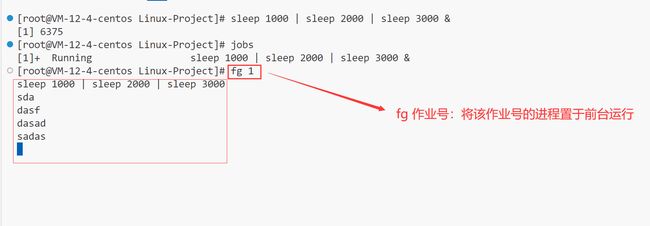
可以看到,置于前台运行后,命令行输入什么都没有反应了。也就是说,此时的bash被自动的放到了后台运行,证实了一个会话组只能有一个前台进程
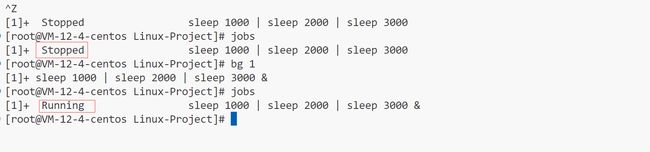
输入ctr + Z 之后前台的进程就会把切回后台,但是切回后台后进程是阻塞状态的,因此输入bg + 作业号就可让进程启动。
服务端守护进程化
那么很显然,在业务逻辑上服务端肯定是需要守护进程化的。因为服务端没有特殊情况是不会关闭的,需要一直运行。如果服务端是前台进程的话,那服务端运行时bash都不能用了,显然不符合。
这里要介绍一个接口:
#include 这个接口的作用是使调用的进程独立成为一个会话组并且为该组的组长。但是调用这个接口是有前置条件的:调用这个接口的进程不能为某个会话组的组长
守护进程化的步骤:
- 让调用进程忽略掉异常信号,因为其不受终端控制的
- 让调用进程不为组长
- 关闭或者重定向之前默认打开的文件,如0 1 2文件描述符
#pragma once
#include 接着只需要服务端在初始化完成后调用这个函数,将自己设为守护进程化即可
一起来看看效果:

可以看到服务端启动后并不会影响bash,仍然可以在bash上输入指令去执行。客户端也能够很好的接收到数据,这就符合现实中服务端的逻辑。