【IMX6ULL驱动开发学习】04.应用程序和驱动程序数据传输和交互的4种方式:非阻塞、阻塞、POLL、异步通知
一、数据传输
1.1 APP和驱动
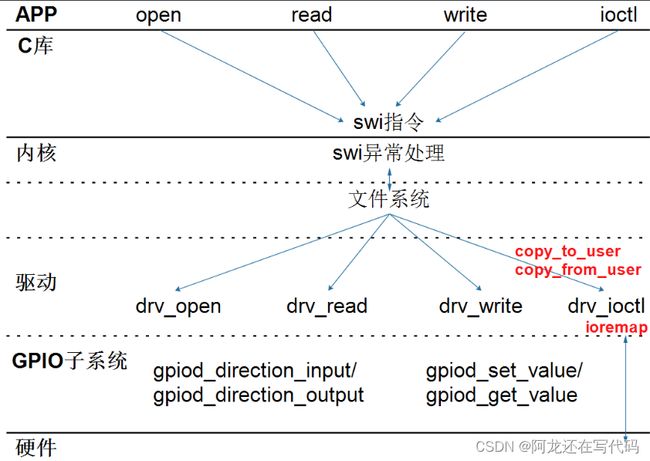
APP和驱动之间的数据访问是不能通过直接访问对方的内存地址来操作的,这里涉及Linux系统中的MMU(内存管理单元)。在驱动程序中通过这两个函数来获得APP和传给APP数据:
- copy_to_user
- copy_from_user
简单来讲,应用程序与内核/驱动程序在物理空间上是隔离开的,应用程序和驱动程序是不可能互相访问到的。驱动程序里的copy_from_user得到应用层传来的数据,驱动程序可以使用copy_to_user把数据发给应用程序,即应用程序和驱动程序通过这两个函数交换数据。
1.2 驱动和硬件
- 各个子系统函数
- 通过ioremap映射寄存器地址后,直接访问寄存器
驱动程序操作硬件可以通过子系统的方式(调用函数)来操作硬件;或者用最原始的办法ioremap,映射寄存器的地址(不是直接操作寄存器地址),这样在驱动程序里就可以访问寄存器了。
二、APP使用驱动的4种方式
驱动程序:提供能力,不提供策略(驱动程序提供各种作用的函数,供应用程序抉择并使用)。
2.1 非阻塞(查询)
如果在应用程序里open这个argv[1](设备节点)时,指定了非阻塞,表示读数据时,如果没有数据并且这个文件的flag是非阻塞,则立刻返回一个错误。APP指定了非阻塞方式,驱动程序是否判断它的flag完全由用户决定。
//应用程序
//O_RDWR可读可写,O_NONBLOCK非阻塞方式
fd = open(argv[1], O_RDWR | O_NONBLOCK);
//驱动程序的read
static ssize_t gpio_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
int key;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
wait_event_interruptible(gpio_wait, !is_key_buf_empty());
key = get_key();
err = copy_to_user(buf, &key, 4);
return 4;
}2.2 阻塞(休眠+唤醒)
如果一开始buf里没有数据,APP调用读函数,驱动程序读函数会进入wait_event_interruptible里休眠(放弃运行,不是死等),等待被唤醒。所以我们经常看到read函数很久没有返回,是因为在驱动程序里休眠了。该事件会记录在gpio_wait队列中。
//应用程序
//O_RDWR可读可写,不设置非阻塞
fd = open(argv[1], O_RDWR);
//驱动程序的read
static ssize_t gpio_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
int key;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
wait_event_interruptible(gpio_wait, !is_key_buf_empty());
key = get_key();
err = copy_to_user(buf, &key, 4);
return 4;
}通常配合中断+定时器的方式来唤醒该队列里面等待唤醒的进程/线程。
//中断函数
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
printk("gpio_key_isr key %d irq happened\n", gpio_desc->gpio);
//定时器 用来消除抖动
//修改定时器的超时时间= jiffies(当前时间) + 赫兹/5
mod_timer(&gpio_desc->key_timer, jiffies + HZ/5);
return IRQ_HANDLED;//成功处理
}
//定时器超时函数
static void key_timer_expire(unsigned long data)
{
struct gpio_desc *gpio_desc = (struct gpio_desc *)data;
int val;
int key;
val = gpio_get_value(gpio_desc->gpio);
key = (gpio_desc->key) | (val<<8);
put_key(key);//按键值放入环形缓冲区
//唤醒队列中的进程/线程
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}2.3 POLL(休眠+唤醒+超时时间)
2.3.1 POLL机制流程
使用休眠-唤醒的方式等待某个事件发生时,有一个缺点: 等待的时间可能很久。我们可以加上一个超时时间,这时就可以使用 poll 机制。poll机制流程如下6步:
①APP不知道驱动程序中是否有数据,可以先调用poll函数查询一下,poll函数可以传入超时时间;
②APP进入内核态,调用到驱动程序的poll函数,如果有数据的话立刻返回;
③如果发现没有数据时就休眠一段时间;
④当有数据时,比如当按下按键时,驱动程序的中断服务程序和定时器超时函数被调用,它会记录数据、唤醒APP;
⑤当超时时间到了之后,内核也会唤醒APP;
⑥APP根据poll函数的返回值就可以知道是否有数据,如果有数据就调用read得到数据。
2.3.2 POLL执行流程

图1 poll机制
函数执行流程如上图①~⑧所示,重点从③开始看。假设一开始无按键数据:
③APP调用poll之后,进入内核态;
④在循环中执行程序,致驱动程序的drv_poll被调用;注意,drv_poll要把自己这个线程挂入等待队列 wq 中!,并没有休眠,且无数据返回0,有数据返回POLLIN;
⑤当前没有数据,则在内核态中休眠一会,等待超时内核唤醒或中断+定时器唤醒;
中断+定时器唤醒情况:
⑥过程中,按下了按键,发生了中断+定时器超时函数,在定时器超时函数里记录了按键值,并且从gpio_wait队列中把线程唤醒了;
⑦从休眠中被唤醒,继续执行 for 循环,再次调用 drv_poll,在drv_poll中返回数据状态(POLLIN);
⑧有数据返回到内核态,内核态返回到应用态;
⑨APP调用read函数读数据。
超时内核唤醒情况:接着上面的⑤
⑥在休眠过程中,一直没有按下了按键,超时时间到,内核把这个线程唤醒;
⑦线程从休眠中被唤醒,继续执行 for 循环,再次调用 drv_poll,drv_poll返回数据状态
⑧还是没有数据,但是超时时间到了,那从内核态返回到应用态;
⑨APP不能调用 read 函数读数据。
需要注意一下几点!!!
- drv_poll 要把线程挂入队列gpio_wait,但是并不是在 drv_poll 中进入休眠,而是在调用 drv_poll 之后休眠
- drv_poll 要返回数据状态
- APP 调用一次 poll,有可能会导致 drv_poll 被调用 2 次
- 线程被唤醒的原因有 2个:中断(+定时器)发生了去队列gpio_wait中把它唤醒,超时时间到了内核把它唤醒
- APP 要判断 poll 返回的原因:有数据,还是超时。有数据时再去调用read函数
2.3.3 POLL应用和驱动编程
驱动程序中的poll代码
static unsigned int gpio_drv_poll(struct file *fp, poll_table * wait)
{
poll_wait(fp, &gpio_wait, wait);
return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}驱动程序中的中断触发函数:按键消抖+修改了定时器超时时间
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
printk("gpio_key_isr key %d irq happened\n", gpio_desc->gpio);
//定时器 用来消除抖动
mod_timer(&gpio_desc->key_timer, jiffies + HZ/5);//修改定时器的超时时间= jiffies(当前时间) + 赫兹/5
return IRQ_HANDLED;//成功处理
}定时器超时函数:获取按键值+储存按键值+唤醒线程
static void key_timer_expire(unsigned long data)
{
struct gpio_desc *gpio_desc = (struct gpio_desc *)data;
int val;
int key;
val = gpio_get_value(gpio_desc->gpio);
key = (gpio_desc->key) | (val<<8);
put_key(key);//按键值放入环形缓冲区
wake_up_interruptible(&gpio_wait);//唤醒队列里的线程
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
应用程序代码:
struct pollfd fds[1]
int timeout_ms = 5000;
int ret;
int fd;
fds[0].fd = fd; //查询fd这个文件
fds[0].events = POLLIN; //POLLIN表示查询这个文件有没有数据让我读进来
fd = open(argv[1], O_RDWR);
if(fd == -1)
{
printf("can not open file %s\n", argv[1]);
}
while(1)
{
ret = poll(fds, 1, timeout_ms);
//ret为1表示fds结构体中有文件满足返回条件,且返回的事件是这个文件有数据让我读进来POLLIN
if((ret == 1) && (fds[0].revents & POLLIN))
{
read(fd, &val, 4);
printf("get button : 0x%x\n", val);
}
else
{
printf("timeout\n");
}
}
2.4 异步通知
2.4.1 异步通知流程
使用休眠-唤醒、POLL机制时,都需要休眠等待某个事件发生时,它们的差别在于后者可以指定休眠的时长。如果APP不想休眠怎么办?也有类似的方法:驱动程序有数据时主动通知APP,APP收到信号后执行信息处理函数,这就是异步通知。
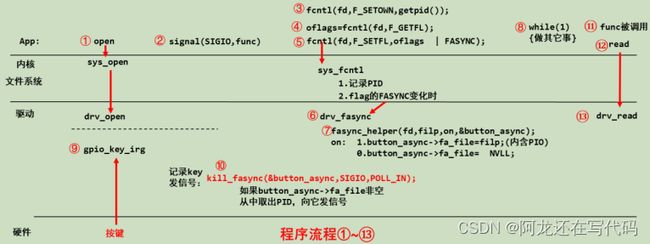
图2 异步通知的信号流程
重点从②开始:
② APP 给 SIGIO 这个信号注册信号处理函数 func,以后 APP 收到 SIGIO信号时,这个函数会被自动调用;
③ 把 APP 的 PID(进程 ID)告诉驱动程序,这个调用不涉及驱动程序,在内核的文件系统层次记录 PID;
④ 读取驱动程序文件 Flag;
⑤ 设置 Flag 里面的 FASYNC 位为 1:当 FASYNC 位发生变化时,会导致驱动程序的 fasync 被调用;
⑥⑦ 调 用 faync_helper , 它会根据FAYSNC的值决定是否设置button_async->fa_file=驱动文件 filp:驱动文件 filp 结构体里面含有之前设置的 PID。
⑧ APP 可以做其他事;
⑨⑩ 按下按键,发生中断,驱动程序的中断服务程序被调用,里面调用kill_fasync 发信号;
⑪⑫⑬ APP 收到信号后,它的信号处理函数被自动调用,可以在里面调用read 函数读取按键。
2.4.1 异步通知应用和驱动编程
应用程序:信号处理函数+注册信号处理函数+打开驱动+把进程ID告诉驱动+使能驱动的FASYNC功能
static void sig_func(int sig)
{
int val;
read(fd, &val, 4);
printf("get button : 0x%x\n", val);
}
signal(SIGIO, sig_func);
fd = open(argv[1], O_RDWR);
if(fd == -1)
{
printf("can not open file %s\n", argv[1]);
}
fcntl(fd, F_SETOWN, getpid()); //告诉驱动程序,要给谁发信号
flags = fcntl(fd, F_GETFL); //获得之前的flags
fcntl(fd, F_SETFL, flags | FASYNC); //这是新的flags并使能驱动的FASYNC功能(使能异步通知)驱动程序中的fasync被调用:使能异步通知后会调用这个辅助函数来构造结构体,结构体里存放进程id
//构造button_fasync结构体,结构体里存放进程id
static int gpio_drv_fasync(int fd, struct file *file, int on)
{
if (fasync_helper(fd, file, on, &button_fasync) >= 0)
return 0;
else
return -EIO;
}驱动程序中的中断触发函数:按键消抖+修改了定时器超时时间
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
printk("gpio_key_isr key %d irq happened\n", gpio_desc->gpio);
//定时器 用来消除抖动
mod_timer(&gpio_desc->key_timer, jiffies + HZ/5);//修改定时器的超时时间= jiffies(当前时间) + 赫兹/5
return IRQ_HANDLED;//成功处理
}定时器超时函数:最后一行发送信号SIGIO给进程,button_fasync结构体中有进程信息,发送信号后,应用程序中收到信号会打断while循环并先执行对应的信号处理函数,再回到while循环。
static void key_timer_expire(unsigned long data)
{
struct gpio_desc *gpio_desc = (struct gpio_desc *)data;
int val;
int key;
val = gpio_get_value(gpio_desc->gpio);
key = (gpio_desc->key) | (val<<8);
put_key(key);//按键值放入环形缓冲区
wake_up_interruptible(&gpio_wait);//唤醒队列里的线程
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}