【TI毫米波雷达笔记】IWR6843AOP的CCS工程模板创建(MSS)(cannot find file “libsleep_xwr68xx.aer4f“解决方案)
【TI毫米波雷达笔记】IWR6843AOP的CCS工程模板创建(MSS)(cannot find file "libsleep_xwr68xx.aer4f"解决方案)
主要参考:
blog.csdn.net/qq_16660871/article/details/126246572
本文大体上与之类似 但用的SDK是3.5版本
若遇到报错:
cannot find file "libsleep_xwr68xx.aer4f"
则按我的配置流程和我先前的文章来
MSS工程模板:
download.csdn.net/download/weixin_53403301/88215083
新建工程
在CCS里面新建工程 选择芯片 调试用设备和typical工程类型
Next之后要求选择Target和Platform,在页面下方处如下填写:
Target: ti.targets.arm.elf.R4Ft
Platform: ti.platforms.cortexR:IWR68XX:false:200
Build-profile任意选择
建立好工程以后 在工程属性的general中也可以进行更改 只不过改到release版本以后需要重新配置各个设置



另外 在products中 点击add 添加mmwave sdk和sysconfig 如图
修改文件
这样工程就创建好了。在左侧的Project Explorer中,可以看到。接下来,我们需要对工程的属性进行调整,并覆盖一些工程自带的文件来满足开发需求。

其中 main.h main_callback.h和main_callback.h是我自己添加的
代码如下:
main.c:
#include "main.h"
//MCPI_LOGBUF_INIT(9216);
MMWave_Global MMWave_Global_Params={0};
void Init_UART(void)
{
UART_Params uart0_params;
/* 串口引脚初始化 */
/* 共有两个串口,分别为UART-1和UART-3,序号为0和2 */
/* Setup the PINMUX to bring out the MSS UART-1 */
Pinmux_Set_FuncSel(SOC_XWR68XX_PINN5_PADBE, SOC_XWR68XX_PINN5_PADBE_MSS_UARTA_TX);
Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINN5_PADBE, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);
Pinmux_Set_FuncSel(SOC_XWR68XX_PINN4_PADBD, SOC_XWR68XX_PINN4_PADBD_MSS_UARTA_RX);
Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINN4_PADBD, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);
// 这一块用不上
/* Setup the PINMUX to bring out the MSS UART-3 */
// Pinmux_Set_OverrideCtrl(SOC_XWR68XX_PINF14_PADAJ, PINMUX_OUTEN_RETAIN_HW_CTRL, PINMUX_INPEN_RETAIN_HW_CTRL);
// Pinmux_Set_FuncSel(SOC_XWR68XX_PINF14_PADAJ, SOC_XWR68XX_PINF14_PADAJ_MSS_UARTB_TX);
UART_Params_init(&uart0_params);
uart0_params.baudRate = 115200*8; //波特率115200*8
uart0_params.clockFrequency = MSS_SYS_VCLK; //系统时钟频率200MHz
uart0_params.dataLength = UART_LEN_8; //8bit字长
uart0_params.isPinMuxDone = 1; //已经完成引脚复用初始化
uart0_params.parityType = UART_PAR_NONE; //无校验位
uart0_params.readDataMode = UART_DATA_BINARY; //按位方式读取数据
uart0_params.readEcho = UART_ECHO_OFF; //关闭回显
uart0_params.readReturnMode = UART_RETURN_FULL; //完整读取
uart0_params.stopBits = UART_STOP_ONE; //1停止位
uart0_params.writeDataMode = UART_DATA_BINARY; //按位方式写入(发送)数据
MMWave_Global_Params.handle.uart0_handle = UART_open(0, &uart0_params); //打开串口
if(MMWave_Global_Params.handle.uart0_handle == NULL)
{
System_printf("[INFO] UART0 open fail\n!");
return;
}
else
{
System_printf("[INFO] UART0 open success\n!");
/*
while(1)
{
//不断读取收到的数据,并通过串口发送出去
//该函数会使进程进入挂起等待状态,不会使其他任务无法执行
//可以发现打印任务也可以执行
UART_read(MMWave_Global_Params.handle.uart0_handle, &MMWave_Global_Params.uart0_rx, 1);
UART_write(MMWave_Global_Params.handle.uart0_handle, &MMWave_Global_Params.uart0_rx, 1);
}
*/
}
}
/**
* @b Description
* @n
* The task is used to provide an execution context for the MMWave
* control task
*
* @retval
* Not Applicable.
*/
void Ctrl_MMWave(UArg arg0, UArg arg1)
{
int32_t errCode;
while (1)
{
/* Execute the MMWave control module: */
if (MMWave_execute (MMWave_Global_Params.handle.MMWave_handle, &errCode) < 0)
{
//System_printf ("Error: MMWave control execution failed [Error code %d]\n", errCode);
}
}
}
void Init_MMWave(void)
{
int32_t errCode;
MMWave_InitCfg initCfg;
MMWave_OpenCfg openCfg;
MMWave_CtrlCfg ctrlCfg;
MMWave_CalibrationCfg calibrationCfg;
Task_Params taskParams; //任务参数
memset ((void*)&initCfg, 0 , sizeof(MMWave_InitCfg));
memset ((void*)&initCfg, 0 , sizeof(MMWave_OpenCfg));
memset ((void *)&calibrationCfg, 0, sizeof(MMWave_CalibrationCfg));
memset ((void*)&ctrlCfg, 0 , sizeof(MMWave_CtrlCfg));
initCfg.domain = MMWave_Domain_MSS;
initCfg.socHandle = MMWave_Global_Params.handle.socHandle;
initCfg.eventFxn = MMWave_eventFxnCallback; //事件回调
initCfg.linkCRCCfg.useCRCDriver = 0U; //1开启CRC 0关闭CRC
initCfg.linkCRCCfg.crcChannel = CRC_Channel_CH1; //CRC通道1
initCfg.cfgMode = MMWave_ConfigurationMode_MINIMAL; //最小模式 也可以设置成全部模式
initCfg.executionMode = MMWave_ExecutionMode_ISOLATION; //MSS和DSS不通讯 如果需要 则换个模式
//以下全是回调
initCfg.cooperativeModeCfg.cfgFxn = MMWave_cfgFxnCallback;
initCfg.cooperativeModeCfg.closeFxn = MMWave_closeFxnCallback;
initCfg.cooperativeModeCfg.openFxn = MMWave_openFxnCallback;
initCfg.cooperativeModeCfg.startFxn = MMWave_startFxnCallback;
initCfg.cooperativeModeCfg.stopFxn = MMWave_stopFxnCallback;
/* Initialize and setup the MMWave Control module */
MMWave_Global_Params.handle.MMWave_handle = MMWave_init (&initCfg, &errCode);
if (MMWave_Global_Params.handle.MMWave_handle == NULL)
{
/* Error: Unable to initialize the MMWave control module */
System_printf ("[INFO] Error: MMWave Control Initialization failed [Error code %d]\n", errCode);
return;
}
System_printf ("[INFO] Debug: MMWave Control Initialization was successful\n");
/* Synchronization: This will synchronize the execution of the control module
* between the domains. This is a prerequiste and always needs to be invoked. */
//同步
if (MMWave_sync (MMWave_Global_Params.handle.MMWave_handle, &errCode) < 0)
{
/* Error: Unable to synchronize the MMWave control module */
System_printf ("[INFO] Error: MMWave Control Synchronization failed [Error code %d]\n", errCode);
return;
}
System_printf ("[INFO] Debug: MMWave Control Synchronization was successful\n");
/*****************************************************************************
* Launch the MMWave control execution task
* - This should have a higher priroity than any other task which uses the
* MMWave control API
*****************************************************************************/
//这里是开了一个线程循环调用
Task_Params_init(&taskParams);
taskParams.priority = 5;
taskParams.stackSize = 3*1024;
MMWave_Global_Params.task.MMWaveCtrl = Task_create(Ctrl_MMWave, &taskParams, NULL);
openCfg.freqLimitLow = 600U; //低频限制
openCfg.freqLimitHigh = 640U; //高频限制
openCfg.chCfg.rxChannelEn = 0x000F; //开启四个RX
openCfg.chCfg.txChannelEn = 0x0007; //开启四个TX
openCfg.chCfg.cascading = 0x0000; //不开启级联
openCfg.chCfg.cascadingPinoutCfg = 0; //直接给0
openCfg.lowPowerMode.lpAdcMode = 0x0000; //Regular ADC mode
openCfg.adcOutCfg.fmt.b2AdcBits = 2; //16bit
openCfg.adcOutCfg.fmt.b8FullScaleReducFctr = 0; //16bit只能为0
openCfg.adcOutCfg.fmt.b2AdcOutFmt = 2; //Complex with Image band
openCfg.defaultAsyncEventHandler = MMWave_DefaultAsyncEventHandler_MSS;
openCfg.disableFrameStartAsyncEvent = false;
openCfg.disableFrameStopAsyncEvent = false;
openCfg.useCustomCalibration = false; // 无自定义校准 false表示默认启用所有校准
openCfg.customCalibrationEnableMask = 0x0;
openCfg.calibMonTimeUnit = 1; //一帧一次校准
/*
MMWave_CalibrationData calibrationData;
memset ((void*)&calibrationCfg, 0 , sizeof(MMWave_CalibrationCfg));
calibrationData.ptrCalibData->calibChunk
calibrationData.ptrPhaseShiftCalibData->PhShiftcalibChunk
*/
/* Open the mmWave module: */
if (MMWave_open (MMWave_Global_Params.handle.MMWave_handle, &openCfg, NULL, &errCode) < 0)
{
/* Error: decode and Report the error */
//MMWave_decodeError (errCode, &errorLevel, &mmWaveErrorCode, &subsysErrorCode);
//System_printf ("Error: mmWave Open failed [Error code: %d Subsystem: %d]\n",mmWaveErrorCode, subsysErrorCode);
}
ctrlCfg.dfeDataOutputMode = MMWave_DFEDataOutputMode_FRAME;
ctrlCfg.u.frameCfg.profileHandle[0]=NULL;
ctrlCfg.u.frameCfg.profileHandle[1]=NULL;
ctrlCfg.u.frameCfg.profileHandle[2]=NULL;
ctrlCfg.u.frameCfg.profileHandle[3]=NULL;
ctrlCfg.u.frameCfg.frameCfg.chirpStartIdx = 0;
ctrlCfg.u.frameCfg.frameCfg.chirpEndIdx = 2;
ctrlCfg.u.frameCfg.frameCfg.numLoops = 96;
ctrlCfg.u.frameCfg.frameCfg.numFrames = 0;
ctrlCfg.u.frameCfg.frameCfg.numAdcSamples = 96;
ctrlCfg.u.frameCfg.frameCfg.framePeriodicity = 11000; //55ms
ctrlCfg.u.frameCfg.frameCfg.triggerSelect = 0x0001; //软件API触发
ctrlCfg.u.frameCfg.frameCfg.numDummyChirpsAtEnd = 0;
ctrlCfg.u.frameCfg.frameCfg.frameTriggerDelay = 0;
/*
//frame模式不用配
ctrlCfg.u.continuousModeCfg.cfg.startFreqConst
ctrlCfg.u.continuousModeCfg.cfg.txOutPowerBackoffCode
ctrlCfg.u.continuousModeCfg.cfg.txPhaseShifter
ctrlCfg.u.continuousModeCfg.cfg.digOutSampleRate
ctrlCfg.u.continuousModeCfg.cfg.hpfCornerFreq1
ctrlCfg.u.continuousModeCfg.cfg.hpfCornerFreq2
ctrlCfg.u.continuousModeCfg.cfg.rxGain
ctrlCfg.u.continuousModeCfg.cfg.vcoSelect
ctrlCfg.u.continuousModeCfg.dataTransSize
*/
//ctrlCfg.u.advancedFrameCfg.profileHandle = //NULL; //frame模式不用配
/* Configure the mmWave module: */
if (MMWave_config (MMWave_Global_Params.handle.MMWave_handle, &ctrlCfg, &errCode) < 0)
{
/* Error: Report the error */
//MMWave_decodeError (errCode, &errorLevel, &mmWaveErrorCode, &subsysErrorCode);
//System_printf ("Error: mmWave Config failed [Error code: %d Subsystem: %d]\n",mmWaveErrorCode, subsysErrorCode);
}
calibrationCfg.dfeDataOutputMode = ctrlCfg.dfeDataOutputMode;
calibrationCfg.u.chirpCalibrationCfg.enableCalibration = true;
calibrationCfg.u.chirpCalibrationCfg.enablePeriodicity = true;
calibrationCfg.u.chirpCalibrationCfg.periodicTimeInFrames = 10; //每10帧一次校准
//calibrationCfg.u.contCalibrationCfg.enableOneShotCalibration //frame模式不用配
/* Start the mmWave module: The configuration has been applied successfully. */
if (MMWave_start(MMWave_Global_Params.handle.MMWave_handle, &calibrationCfg, &errCode) < 0)
{
/* Error/Warning: Unable to start the mmWave module */
//MMWave_decodeError (errCode, &errorLevel, &mmWaveErrorCode, &subsysErrorCode);
//System_printf ("Error: mmWave Start failed [mmWave Error: %d Subsys: %d]\n", mmWaveErrorCode, subsysErrorCode);
/* datapath has already been moved to start state; so either we initiate a cleanup of start sequence or
assert here and re-start from the beginning. For now, choosing the latter path */
}
}
void MMWave_InitTask (UArg arg0, UArg arg1)
{
//MCPI_Initialize();
GPIO_init(); //GPIO初始化
UART_init(); //串口初始化
Init_UART();
Init_MMWave();
}
int main (void)
{
int32_t errCode; //存放SOC初始化错误代码
SOC_Cfg socCfg; //SOC配置结构体
Task_Params taskParams; //任务参数
ESM_init(0U); //与安全等有关,可略过
/* Initialize the SOC configuration: */
/* 初始化SOC配置结构体 */
memset ((void *)&socCfg, 0, sizeof(SOC_Cfg));
/* 配置SOC配置结构体 */
/* Populate the SOC configuration: */
socCfg.clockCfg = SOC_SysClock_INIT;
socCfg.mpuCfg = SOC_MPUCfg_CONFIG;
/* require to UNHALT the DSS if this core is available in selected device */
socCfg.dssCfg = SOC_DSSCfg_UNHALT;
/* Initialize the SOC Module: This is done as soon as the application is started
* to ensure that the MPU is correctly configured. */
/* SOC初始化,必须在系统运行后尽快调用该初始化函数 */
MMWave_Global_Params.handle.socHandle = SOC_init (&socCfg, &errCode);
if (MMWave_Global_Params.handle.socHandle == NULL)
{
System_printf ("[INFO] Error: SOC Module Initialization failed [Error code %d]\n", errCode);
return -1;
}
/* Initialize the Task Parameters. */
/* 创建一个任务用于测试 */
Task_Params_init(&taskParams);
taskParams.priority = 3; //优先级3
MMWave_Global_Params.task.init = Task_create(MMWave_InitTask, &taskParams, NULL);
/* Start BIOS */
BIOS_start();
return 0;
}
main.h:
/*
* main.h
*
* Created on: 2023年7月31日
* Author: ZHOU
*/
#ifndef MAIN_H_
#define MAIN_H_
#include main_callback.c:
/*
* main_callback.c
*
* Created on: 2023年8月3日
* Author: ZHOU
*/
#include "main_callback.h"
int32_t MMWave_eventFxnCallback(uint16_t msgId, uint16_t sbId, uint16_t sbLen, uint8_t *payload)
{
return 0;
}
void MMWave_cfgFxnCallback(MMWave_CtrlCfg* ptrCtrlCfg)
{
}
void MMWave_openFxnCallback(MMWave_OpenCfg* ptrOpenCfg)
{
}
void MMWave_closeFxnCallback(void)
{
}
void MMWave_startFxnCallback(MMWave_CalibrationCfg* ptrCalibrationCfg)
{
}
void MMWave_stopFxnCallback(void)
{
}
main_callback.h:
/*
* main_callback.h
*
* Created on: 2023年8月3日
* Author: ZHOU
*/
#ifndef MAIN_CALLBACK_H_
#define MAIN_CALLBACK_H_
#include "main.h"
int32_t MMWave_eventFxnCallback(uint16_t msgId, uint16_t sbId, uint16_t sbLen, uint8_t *payload);
void MMWave_cfgFxnCallback(MMWave_CtrlCfg* ptrCtrlCfg);
void MMWave_openFxnCallback(MMWave_OpenCfg* ptrOpenCfg);
void MMWave_closeFxnCallback(void);
void MMWave_startFxnCallback(MMWave_CalibrationCfg* ptrCalibrationCfg);
void MMWave_stopFxnCallback(void);
#endif /* MAIN_CALLBACK_H_ */
关于如何新建文件 可以查看CCS相关操作
这段代码是我基于官方demo例程进行的编写和修改。
其中 MCPI 是用于系统调试log输出的 但是也可以不加 不然可能会因为没有指定MCPI模块运行的地方而报错 所以我直接注释了
移植配置文件
-
从
/packages/ti/platform/xwr68xx 下,拷贝r4f_linker.cmd到工程中 -
打开**
/packages/ti/drivers**下的任意一个驱动文件夹,这里以gpio驱动为例,则打开 /packages/ti/drivers/gpio/test/xwr68xx,从中拷贝mss.cfg到工程中,此时工程如下

修改工程属性
- Resource->Linked Resources,右侧点击New添加条目MMWAVE_SDK_DIR(名称可自定),路径定位到mmWave SDK安装路径,如下

- 在XDC构建SYS/BIOS的过程中,需要让其将枚举的类型设置为int型,否则可能会导致诸如串口无法开启、控制台无法打印输出等问题,具体原理暂时不明。
Build->XDCtools->Advanced Options中,页面下方的Additional complier options,填入"–enum_type=int",如下

一定要注意–是两个英文的横杠(减号)
3. Build->Arm Complier->Processor Options,右侧的Designate code state,从32修改为16,否则会产生一些奇奇怪怪的问题。
4. Build->Arm Complier->Include Options,右侧上方的搜索路径列表,点击带有绿色加号的图标添加,添加目录 ${MMWAVE_SDK_DIR}/packages
- mmWave SDK提供的库在设计的时候考虑了整个系列雷达芯片的兼容性,因此库内有多套代码,通过宏定义来区分需要使用哪一段代码进行编译。为此,我们需要向编译器的预定义符号里添加一些用来表示当前目标芯片的宏。
Build->Arm Complier->Prodefined Symbols,右侧上方添加以下符号(直接复制下面的内容,然后点击框内原先已有的宏,按Ctrl+V即可一次性直接粘贴进去)
SOC_XWR68XX
SUBSYS_MSS
DOWNLOAD_FROM_CCS
MMWAVE_L3RAM_NUM_BANK=6
MMWAVE_SHMEM_TCMA_NUM_BANK=0
MMWAVE_SHMEM_TCMB_NUM_BANK=0
MMWAVE_SHMEM_BANK_SIZE=0x20000
DebugP_ASSERT_ENABLED
_LITTLE_ENDIAN
OBJDET_NO_RANGE
AOP
其中 如果需要指定L3代码和MSS用的大小 则配置:
MMWAVE_L3_CODEMEM_SIZE=0x100
MMWAVE_MSSUSED_L3RAM_SIZE=0x90000

6. 此处需要更改Runtime Model Options内的选项,同样也是将enum类型设置为int,与在XDCtools中的设置保持一致。
Build->Arm Complier->Advanced Options,右侧Designate enum type更改为int类型

7. 大部分驱动的函数都封装成库提供给用户了,所以需要将库文件添加到连接器的搜索路径中,否则会出现未解析符号的问题。
Build->Arm Linker->File Search Path,上方添加如下内容(一样可以直接复制过去)
libosal_xwr68xx.aer4f
libesm_xwr68xx.aer4f
libtestlogger_xwr68xx.aer4f
libgpio_xwr68xx.aer4f
libsoc_xwr68xx.aer4f
libpinmux_xwr68xx.aer4f
libcrc_xwr68xx.aer4f
libuart_xwr68xx.aer4f
libmailbox_xwr68xx.aer4f
libmmwavelink_xwr68xx.aer4f
libmmwave_xwr68xx.aer4f
libadcbuf_xwr68xx.aer4f
libdma_xwr68xx.aer4f
libedma_xwr68xx.aer4f
libcli_xwr68xx.aer4f
libhwa_xwr68xx.aer4f
libdpm_xwr68xx.aer4f
libmathutils.aer4f
libcbuff_xwr68xx.aer4f
libhsiheader_xwr68xx.aer4f
librangeproc_hwa_xwr68xx.aer4f
libdpedma_hwa_xwr68xx.aer4f
libqspi_xwr68xx.aer4f
libqspiflash_xwr68xx.aer4f
rtsv7R4_T_le_v3D16_eabi.lib
其中 libsleep_xwr68xx.aer4f是3.6才有的 3.5没有
下方添加如下内容,其中MMWAVE_SDK_DIR和前面设定Linked Resources时添加的变量名保持一致即可。
${MMWAVE_SDK_DIR}/packages/ti/control/mmwave/lib
${MMWAVE_SDK_DIR}/packages/ti/control/mmwavelink/lib
${MMWAVE_SDK_DIR}/packages/ti/control/dpm/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/adcbuf/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/crc/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/dma/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/edma/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/esm/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/gpio/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/hwa/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/mailbox/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/osal/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/pinmux/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/soc/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/uart/lib
${MMWAVE_SDK_DIR}/packages/ti/utils/cli/lib
${MMWAVE_SDK_DIR}/packages/ti/utils/mathutils/lib
${MMWAVE_SDK_DIR}/packages/ti/datapath/dpu/rangeproc/lib
${MMWAVE_SDK_DIR}/packages/ti/datapath/dpedma/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/cbuff/lib
${MMWAVE_SDK_DIR}/packages/ti/utils/hsiheader/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/qspi/lib
${MMWAVE_SDK_DIR}/packages/ti/drivers/qspiflash/lib
${MMWAVE_SDK_DIR}/packages/ti/utils/libsleep/lib
${MMWAVE_SDK_DIR}/packages/ti/utils/testlogger/lib

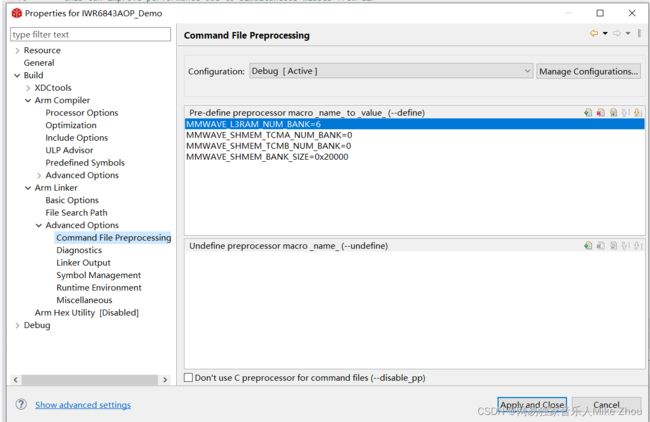
8. 同样地,在此处也需要填入一些预定义的符号,比如r4f_linker.cmd文件中用到的几个宏的大小。
Build->Arm Linker->Advanced Options->Command File PreProcess,上方添加
MMWAVE_L3RAM_NUM_BANK=6
MMWAVE_SHMEM_TCMA_NUM_BANK=0
MMWAVE_SHMEM_TCMB_NUM_BANK=0
MMWAVE_SHMEM_BANK_SIZE=0x20000
其中 如果需要指定L3代码和MSS用的大小 则配置:
MMWAVE_L3_CODEMEM_SIZE=0x100
MMWAVE_MSSUSED_L3RAM_SIZE=0x90000
9. 修改大端格式
因为芯片烧录是大端 所以要在general里面修改为大端格式:
小端格式也可以 官方工程大多就是小端格式 但是不要用be32或者be8格式 否则会警告只能用大端格式
- 点击右下角Apply and Close,再对工程重新编译,可以看到所有错误都消失了。但仍然有一个警告,提示缺少systemHeap段定义。因此打开r4f_linker.cmd文件,手动在SECTIONS内添加:
systemHeap : {} > DATA_RAM

之后再编译就不会出现问题了。
编译
