概念解析 | 群像素激光雷达
群像素激光雷达技术解析
注1:本文系“概念解析”系列之一,致力于简洁清晰地解释、辨析复杂而专业的概念。本次辨析的概念是:群像素激光雷达技术。
1. 背景介绍
激光雷达作为一种主动式激光探测技术,通过发射脉冲激光并接收其反射回波信号,来获取目标距离和其他信息,在军事侦察、无人驾驶、机器人导航等领域有着广泛的应用。但传统的点状激光雷达存在图像分辨率受限等问题。为此,群像素激光雷达技术被提出,其通过在传感器上引入编码/解码过程,实现单个传感器像元对应多个图像像素,从而大大提高了图像分辨率。
群像素激光雷达技术通过在传感器上引入编码/解码过程,实现单个传感器像元对应多个图像像素,大大提高了图像分辨率。
2. 原理介绍
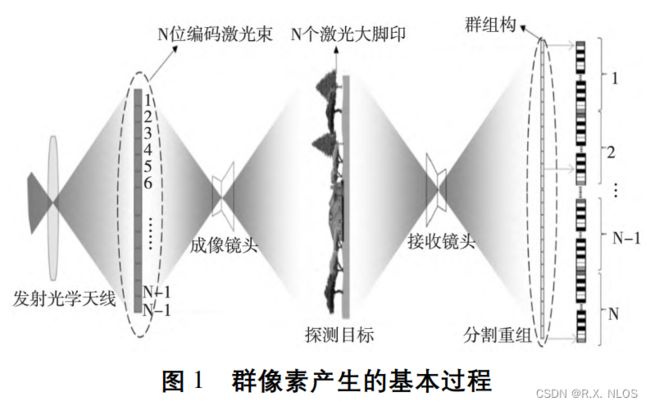
群像素激光雷达的基本原理是:在传感器端加入编码模块,在激光发射端引入解码模块。
具体来说,编码模块对激光进行编码,生成多个带有特定编码的激光脚印,这些脚印与目标交互后产生回波。而解码模块对回波进行解码,通过相关解码算法提取每个脚印的特征,最后形成高分辨率的图像。
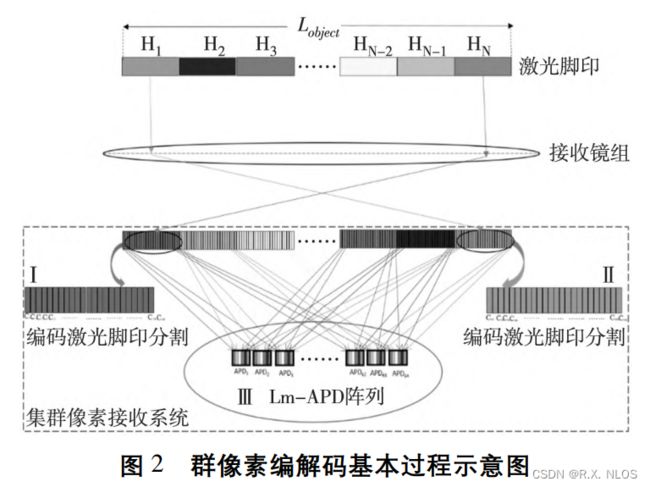
数学上,设编码矩阵为 H H H,回波信号为 y ( t ) y(t) y(t),第 k k k个像素的解码过程可表示为:
a k , t k = H k ⋅ y ( t ) = ∑ i = 1 N h i k p i ( t − t i ) {a_k, t_k}=H_k \cdot y(t)=\sum_{i=1}^N h_{ik} p_i(t-t_i) ak,tk=Hk⋅y(t)=i=1∑Nhikpi(t−ti)
其中, h _ i k h\_{ik} h_ik是编码矩阵中的元素, p i ( t ) p_i(t) pi(t)是不同像素的回波响应,通过相关解码,可以分离出每个像素的振幅 a k a_k ak和时间 t k t_k tk,进而计算出像素对应的距离信息。
通过在传感器端引入编码模块,在激光发射端引入解码模块,实现单传感器对应多个图像像素,大大提高了图像分辨率。

3. 研究现状
群像素激光雷达技术目前还处于初级研究阶段,主要集中在以下几个方面:
-
编码方式研究:研究不同编码矩阵对成像效果的影响,包括随机矩阵编码、Walsh编码等。
-
图像复原算法研究:研究不同的解码和图像复原算法,提高图像质量。
-
系统结构优化:研究编码解码模块的硬件实现方式,提高稳定性。
-
成像特性研究:研究距离分辨率、角分辨率、动态范围等成像特性指标。
-
扫描方式研究:研究线性推扫、旋转扫描等不同扫描方式对成像的影响。
-
数据处理优化:提出层次分解等算法,优化大量数据的处理效率。
当前研究主要集中在编码方式、图像复原、系统结构、成像特性、扫描方式、数据处理等方面。
4. 挑战
尽管群像素激光雷达技术展现出强大的应用前景,但仍面临以下挑战:
-
图像质量保证:编码解码过程会降低图像质量,需要研发更好的编码解码算法来保证质量。
-
实时性:大量数据处理导致图像生成时间过长,无法实现实时成像。
-
距离范围:编码会降低激光传播距离,需要扩大工作距离。
-
成本控制: 编码解码模块增加了系统成本,需要降低成本。
-
环境适应性:不同环境下的成像效果和鲁棒性需要测试。
主要挑战包括保证图像质量、实现实时成像、扩大工作距离、控制成本和提高环境适应性。
5. 展望
随着研究的深入,群像素激光雷达技术有望取得进一步突破:
-
编码方式将趋向自适应,根据环境和目标特征进行最优编码。
-
数据处理算法将成熟高效,实现实时高分辨率成像。
-
系统实现将趋向集成化,大幅降低成本。
-
图像质量将持续提升,具备识别和分类能力。
-
工作距离将扩大到公里级,可用于远距离目标探测。
群像素激光雷达技术有望实现实时高分辨率成像、远距离探测等,在机器视觉、自动驾驶等领域获得广泛应用。
代码示例
# 简单的编码解码算法实现
import numpy as np
# 编码矩阵
H = np.random.randn(3,5)
# 激光脚印信号
footprint1 = np.array([1,0,0])
footprint2 = np.array([0,1,0])
footprint3 = np.array([0,0,1])
# 编码得到回波信号
echo = H.dot(footprint1 + footprint2 + footprint3)
# 解码
decoded1 = np.dot(H[:,0], echo)
decoded2 = np.dot(H[:,1], echo)
decoded3 = np.dot(H[:,2], echo)
# 解码成功,decoded1~3分别提取出了对应的脚印信号
print(decoded1, decoded2, decoded3)
以上就是关于群像素激光雷达技术的简要解析。这种技术通过在传感器上引入编码/解码过程实现超分辨率成像,解决了传统激光雷达的图像分辨率问题,但仍面临图像质量、实时性等技术挑战。随着研究的深入,预计该技术会取得更多突破,在自动驾驶等领域获得广泛应用。