旋转矩阵-rotation matrix简介
转载自:https://zhuanlan.zhihu.com/p/533911656,仅作学习记录
文章目录
- 一、 二维旋转
- 二、三维旋转
-
- 1. 绕x轴旋转
- 2. 绕y轴旋转
- 3. 绕z轴旋转
- 三、例子
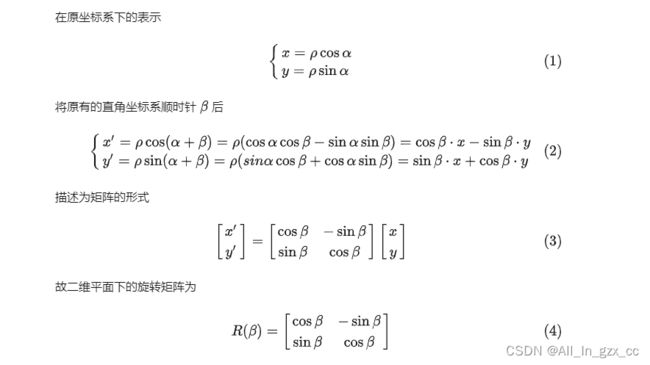
一、 二维旋转

import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
#define canvas
fig, ax = plt.subplots()
line, = ax.plot([],[])
x0 = np.array([i for i in range(10)])
y0 = np.array([0 for i in range(10)])
#rotate
def rotate(x,y,theta):
return x*np.cos(theta) + y *(-np.sin(theta)), x * np.sin(theta) + y * np.cos(theta)
def update(theta):
ax.set_xlim(-10, 10)
ax.set_ylim(-10, 10)
ax.axis('equal')
x,y = rotate(x0, y0, theta)
line.set_data(x,y)
return line
animation = FuncAnimation(fig, update, frames = np.linspace(0,np.pi*2, 200), interval = 50)
animation.save("rotate.gif", writer = "imagegick", fps = 10)
plt.show()
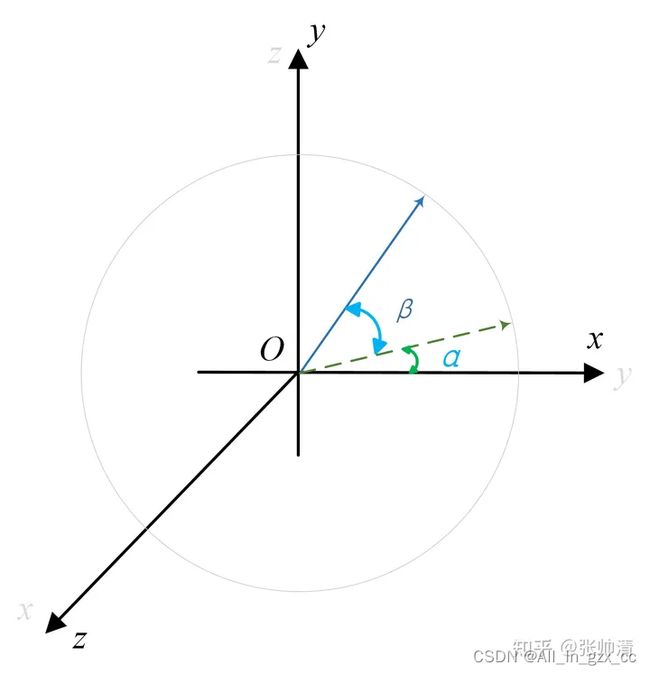
二、三维旋转
设距离旋转中心的距离为 ρ
1. 绕x轴旋转


2. 绕y轴旋转


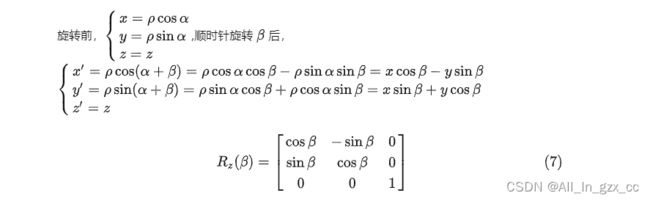
3. 绕z轴旋转
三、例子
import numpy as np
import matplotlib.pyplot as plt
class Rotate(object):
def __init__(self, dim = 2, x = 0, y = 0, alpha = 0, beta = 0, gamma = 0):
self.dim = dim
self.x = x
self.y = y
self.alpha = alpha
self.beta = beta
self.gamma = gamma
def R2(self,alpha):
return np.array([
[np.cos(alpha), -np.sin(alpha)],
[np.sin(alpha), np.cos(alpha) ]
])
def Rx(self, beta):
return np.array([
[1, 0, 0],
[0, np.cos(beta), -np.sin(beta)],
[0, np.sin(beta), np.cos(beta) ]
])
def Ry(self, beta):
return np.array([
[np.cos(beta) , 0, np.sin(beta)],
[0 , 1, 0 ],
[-np.sin(beta), 0, np.cos(beta)]
])
def Rz(self, beta):
return np.array([
[np.cos(beta), -np.sin(beta), 0],
[np.sin(beta), np.cos(beta), 0],
[0 , 0 , 1]
])
def R(self):
pass
def show(self):
X = np.array([[1],[2]])
Y = np.matmul(self.R2(np.pi/2), X)
plt.scatter(X[0],X[1], color = "red")
#plt.show()
plt.scatter(Y[0],Y[1], color = "green")
x1 = X[0,0]
y1 = X[1,0]
x2 = Y[0,0]
y2 = Y[1,0]
plt.plot([x1, 0], [y1, 0])
plt.plot([x2, 0], [y2, 0])
plt.axvline(x = 0, color = "blue", ls = "--", lw = 1)
plt.axhline(y = 0, color = "blue", ls = "--", lw = 1)
plt.axis("equal")
plt.legend(["X","Y"])
plt.show()
R = Rotate()
R.show()
'''
X = np.array([[1,0]]).T
print("X: ",X)
print("R: ",R.R2(np.pi/2))
print("ans: ", np.matmul(R.R2(np.pi/2), X))
'''

X = np.array([[1],[2]])
Y = np.matmul(self.R2(np.pi/2), X)
plt.scatter(X[0],X[1], color = "red")
#plt.show()
plt.scatter(Y[0],Y[1], color = "green")
x1 = X[0,0]
y1 = X[1,0]
x2 = Y[0,0]
y2 = Y[1,0]
plt.plot([x1, 0], [y1, 0])
plt.plot([x2, 0], [y2, 0])
plt.axvline(x = 0, color = "blue", ls = "--", lw = 1)
plt.axhline(y = 0, color = "blue", ls = "--", lw = 1)
plt.axis("equal")
plt.legend(["X","Y"])
plt.show()