【Vivado HLS学习之CORDIC算法的实现】
【Vivado HLS学习之CORDIC算法】
先抛出一个问题:在FPGA上怎么实现三角函数sin,cos的计算?
以sin为例,在计算机上实现sin函数可以用泰勒展开来近似。
s i n ( x ) ≈ x − x 3 3 ! + x 5 5 ! − x 7 7 ! + x 9 9 ! + . . . sin(x) \approx x - \frac{x^3}{3!} + \frac{x^5}{5!} - \frac{x^7}{7!} + \frac{x^9}{9!} + ... sin(x)≈x−3!x3+5!x5−7!x7+9!x9+...
这种方式看似简单高效,但不便于FPGA上实现;
一个常见的方法是查表法:预先计算好各个相位对应的sin值,将这些数值保存在存储器中,计算时直接查表即可。这种方式的计算精度取决于数据表的长度,想要获得更高的精度,就需要占用更多的存储空间,是一种典型的“空间换时间”思路。
还有其他更合适FPAG的方法,比如CORDIC算法。
接下来介绍CORDIC算法。
CORDIC(Coordinate Rotation Digital Computer)算法即坐标旋转数字计算方法,是J.D.Volder1于1959年首次提出,主要用于三角函数、双曲线、指数、对数的计算。该算法通过基本的加和移位运算代替乘法运算,使得矢量的旋转和定向的计算不再需要三角函数、乘法、开方、反三角、指数等函数。
–摘自百度百科

单位圆上有A和B两点,夹角为θ。A点绕单位圆逆时针旋转θ角就能得到B点,假设A点坐标为(x1, y1),B点坐标为(x2, y2)。坐标变换如下:
{ x 2 = x 1 cos θ − y 1 sin θ y 2 = x 1 sin θ + y 1 cos θ \left\{\begin{matrix} x_2 = x_1\cos\theta - y_1\sin\theta &\\ y_2 = x_1\sin\theta + y_1\cos\theta &\\ \end{matrix}\right. {x2=x1cosθ−y1sinθy2=x1sinθ+y1cosθ
将cosθ项提出,则得到
{ x 2 = ( x 1 − y 1 tan θ ) cos θ y 2 = ( x 1 tan θ + y 1 ) cos θ \left\{\begin{matrix} x_2 = (x_1 - y_1\tan\theta)\cos\theta &\\ y_2 = (x_1\tan\theta + y_1)\cos\theta &\\ \end{matrix}\right. {x2=(x1−y1tanθ)cosθy2=(x1tanθ+y1)cosθ
(注意,如果A->B为顺时针旋转,则上述式中的加减号要互换)
CORDIC算法的思想就是,取一系列固定的角度θi,使得tanθi = 2^(-i),这样一来tan乘积项就可以通过位移操作来实现;而这些固定的θi可以通过查表得到
| θ(弧度) | tan(θ) |
|---|---|
| 0.7853981633974483 | 1 |
| 0.4636476090008061 | 0.5 |
| 0.24497866312686414 | 0.25 |
| 0.12435499454676144 | 0.125 |
| 0.06241880999595735 | 0.0625 |
| 0.031239833430268277 | 0.03125 |
| 0.015623728620476831 | 0.015625 |
| 0.007812341060101111 | 0.0078125 |
| 0.0039062301319669718 | 0.00390625 |
| 0.0019531225164788188 | 0.001953125 |
| 0.0009765621895593195 | 0.0009765625 |
| 0.0004882812111948983 | 0.00048828125 |
至于cosθ,这一项在多次迭代后其累乘结果收敛于一定值K,用下面这一小段代码计算N次迭代后K的值,当N取12时
K = 0.607252959138945
# 计算N次迭代后, 余弦累乘项K
from math import cos, atan, prod
K = lambda N : prod([cos(atan(2**-i)) for i in range(N)])
print(K(12))
所以在迭代时,一开始就从点(K, 0)坐标旋转,按照上面正切表从上到下逐一旋转对应角度,注意旋转方向要向着靠近目标角度的方向。因为一开始就考虑到了K,所以最后迭代完成,旋转到一点的位置,其横坐标x就是cos值,纵坐标y就是sin值。
接下来考虑如何在FPGA上实现算法。使用Q4.12格式的定点数,也就是4位整数,12位小数。因为使用到了Vivado HLS工具,这里给出C语言实现的CORDIC算法,迭代12次,使用定点数运算。
cordic_cos_sin.c
#include
#define PIPELINE 12
#define FIXED_PI ((uint16)0x3243) // 3.14159*2^12
const int16 ROT_TABLE[]={ //旋转角对照表(弧度rad*2^12)
0x0c90, 0x076b, 0x03eb, 0x01fd,
0x00ff, 0x007f, 0x003f, 0x001f,
0x000f, 0x0007, 0x0003, 0x0001
};
// 输入phase定点数 为 弧度*2^12
// 范围0~2pi*2^12
// 输出定点cos, sin
void cordic_cos_sin(
uint16* phase,
int16 * cos,
int16 * sin
){
#pragma HLS INTERFACE port=return
int16 x0= 0x09b7; // 0.60725*2^12 起点坐标
int16 y0= 0; //
int16 x1= 0; // 旋转到下一点的坐标
int16 y1= 0; //
int16 theta; // 起始角度
uint2 quad; // 确定象限
#pragma HLS PIPELINE
if (*phase < FIXED_PI/2){
theta = *phase;
quad = 0;
}else if (*phase < FIXED_PI){
theta = FIXED_PI - *phase;
quad = 1;
}else if (*phase < 3*FIXED_PI/2){
theta = *phase - FIXED_PI;
quad = 2;
}else if (*phase < 2*FIXED_PI){
theta = 2*FIXED_PI - *phase;
quad = 3;
}else{
theta = 0;
quad = 0;
}
// cordic迭代
for (int i = 0; i < PIPELINE; i ++){
#pragma HLS UNROLL
if (theta < 0){
theta += ROT_TABLE[i];
x1 = x0 + (y0 >> i); // x1 = x0 + y0 * tan(...)
y1 = y0 - (x0 >> i); // y1 = y0 - x0 * tan(...)
}else{
theta -= ROT_TABLE[i];
x1 = x0 - (y0 >> i); // x1 = x0 - y0 * tan(...)
y1 = (x0 >> i) + y0; // y1 = x0 * tan(...) + y1
}
x0 = x1; // 更新
y0 = y1;
}
switch (quad)
{
case 0:
*cos = x1;
*sin = y1;
break;
case 1:
*cos = -x1;
*sin = y1;
break;
case 2:
*cos = -x1;
*sin = -y1;
break;
case 3:
*cos = x1;
*sin = -y1;
break;
default:
break;
}
}
再写一个main.c作为testbench
main.c
#include
#include
#include
#define TEST_LEN 100 // 测试100个数
// 待测函数
extern void cordic_cos_sin(
uint16 *phase,
int16 * cos,
int16 * sin
);
int16 float2Q4_12(float f){
return (int16) (f * pow(2, 12));
}
float Q4_12_2float(int16 i){
return (float)( i / pow(2, 12));
}
int main(int argc, char const *argv[]){
printf("********************* cordic test begin *********************\r\n");
for (int16 i = 0; i < TEST_LEN; i++){
float phase_f = 2 * i * M_PI / (float)TEST_LEN;
uint16 phase_fixed = float2Q4_12(phase_f);
float cos_real = cosf(phase_f);
float sin_real = sinf(phase_f);
int16 cos_cordic_fixed = 0;
int16 sin_cordic_fixed = 0;
cordic_cos_sin(&phase_fixed, &cos_cordic_fixed , &sin_cordic_fixed );
float cos_cordic = Q4_12_2float(cos_cordic_fixed);
float sin_cordic = Q4_12_2float(sin_cordic_fixed);
printf("cos(%0.4f): %0.4f / %0.4f, err: %0.4f\t",\
phase_f, cos_real, cos_cordic, cos_real - cos_cordic);
printf("sin(%0.4f): %0.4f / %0.4f, err: %0.4f\r\n",\
phase_f, sin_real, sin_cordic, sin_real - sin_cordic);
}
return 0;
}
下面是运行C仿真打印的结果
********************* cordic test begin *********************
cos(0.0000): 1.0000 / 1.0002, err: -0.0002 sin(0.0000): 0.0000 / 0.0000, err: 0.0000
cos(0.0628): 0.9980 / 0.9985, err: -0.0005 sin(0.0628): 0.0628 / 0.0632, err: -0.0004
cos(0.1257): 0.9921 / 0.9922, err: -0.0001 sin(0.1257): 0.1253 / 0.1257, err: -0.0004
cos(0.1885): 0.9823 / 0.9827, err: -0.0004 sin(0.1885): 0.1874 / 0.1877, err: -0.0004
cos(0.2513): 0.9686 / 0.9688, err: -0.0002 sin(0.2513): 0.2487 / 0.2488, err: -0.0001
cos(0.3142): 0.9511 / 0.9509, err: 0.0001 sin(0.3142): 0.3090 / 0.3098, err: -0.0008
cos(0.3770): 0.9298 / 0.9299, err: -0.0002 sin(0.3770): 0.3681 / 0.3684, err: -0.0003
cos(0.4398): 0.9048 / 0.9045, err: 0.0003 sin(0.43a98): 0.4258 / 0.4265, err: -0.0007
cos(0.5027): 0.8763 / 0.8760, err: 0.0003 sin(0.5027): 0.4818 / 0.4827, err: -0.0009
cos(0.5655): 0.8443 / 0.8442, err: 0.0001 sin(0.5655): 0.5358 / 0.5359, err: -0.0001
cos(0.6283): 0.8090 / 0.8091, err: -0.0001 sin(0.6283): 0.5878 / 0.5872, err: 0.0006
(省略)
可以看出误差还是比较小的,在10^-4数量级
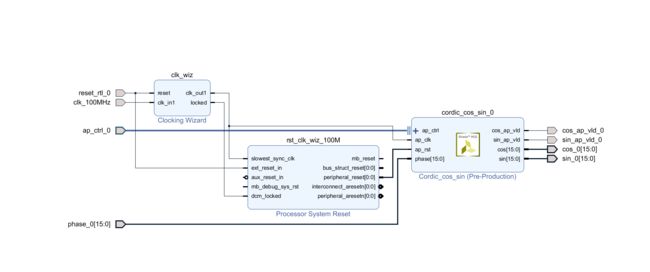
然后将模块打包成IP,导入Vivado测试:
block design
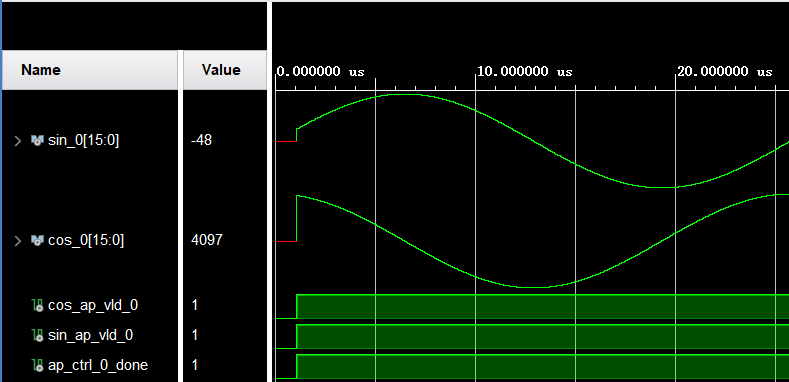
波形图
最后给出测试用的testbench.v
`timescale 1ns/100ps
module tb_cordic_sin_cos;
reg clk;
reg rst_n;
reg input_en;
reg [15:0] theta_rad_q4_12;
wire [15:0] cos_q4_12;
wire [15:0] sin_q4_12;
wire output_en;
cordic_sin_cos u_0(
.clk(clk),
.rst_n(rst_n),
.input_en(input_en),
.theta_rad_q4_12(theta_rad_q4_12),
.cos_q4_12(cos_q4_12),
.sin_q4_12(sin_q4_12),
.output_en(output_en)
);
localparam CLK_PERIOD = 10;
always #(CLK_PERIOD/2) clk=~clk;
initial begin
$dumpfile("tb_cordic_sin_cos.vcd");
$dumpvars(0, tb_cordic_sin_cos);
end
initial begin
#1 rst_n<=1'bx;clk<=1'bx;
theta_rad_q4_12 <= 0;
input_en <= 0;
#(CLK_PERIOD*3) rst_n<=1;
#(CLK_PERIOD*3) rst_n<=0;clk<=0;
repeat(5) @(posedge clk);
rst_n<=1;
input_en <= 1;
for (integer i = 0; i < 25735; i = i + 10) begin
@(negedge clk)
theta_rad_q4_12 <= i;
end
$finish;
end
endmodule
感谢您的阅读,如有错误,欢迎指出