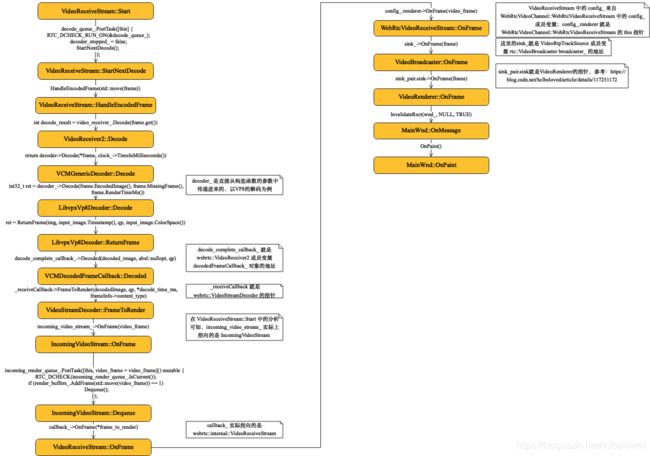
1 函数调用关系图
2 代码
void VideoReceiveStream::Start() {
RTC_DCHECK_RUN_ON(&worker_sequence_checker_);
if (decoder_running_) {
return;
}
const bool protected_by_fec = config_.rtp.protected_by_flexfec ||
rtp_video_stream_receiver_.IsUlpfecEnabled();
frame_buffer_->Start();
if (rtp_video_stream_receiver_.IsRetransmissionsEnabled() &&
protected_by_fec) {
frame_buffer_->SetProtectionMode(kProtectionNackFEC);
}
transport_adapter_.Enable();
rtc::VideoSinkInterface* renderer = nullptr;
if (config_.enable_prerenderer_smoothing) {
incoming_video_stream_.reset(new IncomingVideoStream(
task_queue_factory_, config_.render_delay_ms, this));
renderer = incoming_video_stream_.get();
} else {
renderer = this;
}
for (const Decoder& decoder : config_.decoders) {
std::unique_ptr video_decoder =
decoder.decoder_factory->LegacyCreateVideoDecoder(decoder.video_format, // VideoDecoderFactory::LegacyCreateVideoDecoder
config_.stream_id);
// If we still have no valid decoder, we have to create a "Null" decoder
// that ignores all calls. The reason we can get into this state is that the
// old decoder factory interface doesn't have a way to query supported
// codecs.
if (!video_decoder) {
video_decoder = std::make_unique();
}
std::string decoded_output_file =
field_trial::FindFullName("WebRTC-DecoderDataDumpDirectory");
// Because '/' can't be used inside a field trial parameter, we use ';'
// instead.
// This is only relevant to WebRTC-DecoderDataDumpDirectory
// field trial. ';' is chosen arbitrary. Even though it's a legal character
// in some file systems, we can sacrifice ability to use it in the path to
// dumped video, since it's developers-only feature for debugging.
absl::c_replace(decoded_output_file, ';', '/');
if (!decoded_output_file.empty()) {
char filename_buffer[256];
rtc::SimpleStringBuilder ssb(filename_buffer);
ssb << decoded_output_file << "/webrtc_receive_stream_"
<< this->config_.rtp.remote_ssrc << "-" << rtc::TimeMicros()
<< ".ivf";
video_decoder = CreateFrameDumpingDecoderWrapper(
std::move(video_decoder), FileWrapper::OpenWriteOnly(ssb.str()));
}
video_decoders_.push_back(std::move(video_decoder));
video_receiver_.RegisterExternalDecoder(video_decoders_.back().get(),// 设置解码器
decoder.payload_type);
VideoCodec codec = CreateDecoderVideoCodec(decoder);//注意这里
const bool raw_payload =
config_.rtp.raw_payload_types.count(codec.plType) > 0;
rtp_video_stream_receiver_.AddReceiveCodec(
codec, decoder.video_format.parameters, raw_payload);
RTC_CHECK_EQ(VCM_OK, video_receiver_.RegisterReceiveCodec(
&codec, num_cpu_cores_, false));
}
RTC_DCHECK(renderer != nullptr);
video_stream_decoder_.reset(
new VideoStreamDecoder(&video_receiver_, &stats_proxy_, renderer)); // 创建 VideoStreamDecoder,将 VideoReceiveStream 中的成员变量 VideoReceiver2 video_receiver_ 的指针传递进来
// Make sure we register as a stats observer *after* we've prepared the
// |video_stream_decoder_|.
call_stats_->RegisterStatsObserver(this);
// Start decoding on task queue.
video_receiver_.DecoderThreadStarting(); // VideoReceiver2 video_receiver_;
stats_proxy_.DecoderThreadStarting();
decode_queue_.PostTask([this] {
RTC_DCHECK_RUN_ON(&decode_queue_);
decoder_stopped_ = false;
StartNextDecode(); //在事件循环中不停的执行
});
decoder_running_ = true;
rtp_video_stream_receiver_.StartReceive(); //注意这里
}
std::unique_ptr VideoDecoderFactory::LegacyCreateVideoDecoder(
const SdpVideoFormat& format,
const std::string& receive_stream_id) {
return CreateVideoDecoder(format); // 多态
}
std::unique_ptr InternalDecoderFactory::CreateVideoDecoder(
const SdpVideoFormat& format) {
if (!IsFormatSupported(GetSupportedFormats(), format)) {
RTC_LOG(LS_ERROR) << "Trying to create decoder for unsupported format";
return nullptr;
}
if (absl::EqualsIgnoreCase(format.name, cricket::kVp8CodecName))
return VP8Decoder::Create(); //注意这里
if (absl::EqualsIgnoreCase(format.name, cricket::kVp9CodecName))
return VP9Decoder::Create(); //注意这里
if (absl::EqualsIgnoreCase(format.name, cricket::kH264CodecName))
return H264Decoder::Create(); //注意这里
RTC_NOTREACHED();
return nullptr;
}
VideoCodec CreateDecoderVideoCodec(const VideoReceiveStream::Decoder& decoder) {
VideoCodec codec;
memset(&codec, 0, sizeof(codec));
codec.plType = decoder.payload_type;
codec.codecType = PayloadStringToCodecType(decoder.video_format.name);
if (codec.codecType == kVideoCodecVP8) {
*(codec.VP8()) = VideoEncoder::GetDefaultVp8Settings();
} else if (codec.codecType == kVideoCodecVP9) {
*(codec.VP9()) = VideoEncoder::GetDefaultVp9Settings();
} else if (codec.codecType == kVideoCodecH264) {
*(codec.H264()) = VideoEncoder::GetDefaultH264Settings(); //注意这里
} else if (codec.codecType == kVideoCodecMultiplex) {
VideoReceiveStream::Decoder associated_decoder = decoder;
associated_decoder.video_format =
SdpVideoFormat(CodecTypeToPayloadString(kVideoCodecVP9));
VideoCodec associated_codec = CreateDecoderVideoCodec(associated_decoder);
associated_codec.codecType = kVideoCodecMultiplex;
return associated_codec;
}
codec.width = 320;
codec.height = 180;
const int kDefaultStartBitrate = 300;
codec.startBitrate = codec.minBitrate = codec.maxBitrate =
kDefaultStartBitrate;
return codec;
}
// 一些设置
VideoStreamDecoder::VideoStreamDecoder(
VideoReceiver2* video_receiver,
ReceiveStatisticsProxy* receive_statistics_proxy,
rtc::VideoSinkInterface* incoming_video_stream)
: video_receiver_(video_receiver),
receive_stats_callback_(receive_statistics_proxy),
incoming_video_stream_(incoming_video_stream) {
RTC_DCHECK(video_receiver_);
video_receiver_->RegisterReceiveCallback(this); //注意这里
}
int32_t VideoReceiver2::RegisterReceiveCallback(
VCMReceiveCallback* receiveCallback) {
RTC_DCHECK_RUN_ON(&construction_thread_checker_);
RTC_DCHECK(!IsDecoderThreadRunning());
// This value is set before the decoder thread starts and unset after
// the decoder thread has been stopped.
decodedFrameCallback_.SetUserReceiveCallback(receiveCallback); //注意这里
return VCM_OK;
}
void VCMDecodedFrameCallback::SetUserReceiveCallback(
VCMReceiveCallback* receiveCallback) {
RTC_DCHECK(construction_thread_.IsCurrent());
RTC_DCHECK((!_receiveCallback && receiveCallback) ||
(_receiveCallback && !receiveCallback));
_receiveCallback = receiveCallback; //实际上指向的就是 webrtc::VideoStreamDecoder
}
void VideoReceiveStream::StartNextDecode() {
TRACE_EVENT0("webrtc", "VideoReceiveStream::StartNextDecode");
frame_buffer_->NextFrame( //不停的获取frame
GetWaitMs(), keyframe_required_, &decode_queue_,
/* encoded frame handler */
[this](std::unique_ptr frame, ReturnReason res) {
RTC_DCHECK_EQ(frame == nullptr, res == ReturnReason::kTimeout);
RTC_DCHECK_EQ(frame != nullptr, res == ReturnReason::kFrameFound);
decode_queue_.PostTask([this, frame = std::move(frame)]() mutable {//将取出的frame再次入队进行处理
RTC_DCHECK_RUN_ON(&decode_queue_);
if (decoder_stopped_)
return;
if (frame) {
HandleEncodedFrame(std::move(frame)); // 注意这里
} else {
HandleFrameBufferTimeout();
}
StartNextDecode();
});
});
}
void VideoReceiveStream::HandleEncodedFrame(
std::unique_ptr frame) {
int64_t now_ms = clock_->TimeInMilliseconds();
// Current OnPreDecode only cares about QP for VP8.
int qp = -1;
if (frame->CodecSpecific()->codecType == kVideoCodecVP8) {
if (!vp8::GetQp(frame->data(), frame->size(), &qp)) {
RTC_LOG(LS_WARNING) << "Failed to extract QP from VP8 video frame";
}
}
stats_proxy_.OnPreDecode(frame->CodecSpecific()->codecType, qp);
int decode_result = video_receiver_.Decode(frame.get());//注意这里 VideoReceiver2::Decode
if (decode_result == WEBRTC_VIDEO_CODEC_OK ||
decode_result == WEBRTC_VIDEO_CODEC_OK_REQUEST_KEYFRAME) {
keyframe_required_ = false;
frame_decoded_ = true;
rtp_video_stream_receiver_.FrameDecoded(frame->id.picture_id);
if (decode_result == WEBRTC_VIDEO_CODEC_OK_REQUEST_KEYFRAME)
RequestKeyFrame();
} else if (!frame_decoded_ || !keyframe_required_ ||
(last_keyframe_request_ms_ + max_wait_for_keyframe_ms_ < now_ms)) {
keyframe_required_ = true;
// TODO(philipel): Remove this keyframe request when downstream project
// has been fixed.
RequestKeyFrame();
last_keyframe_request_ms_ = now_ms;
}
}
int32_t VideoReceiver2::Decode(const VCMEncodedFrame* frame) {
RTC_DCHECK_RUN_ON(&decoder_thread_checker_);
TRACE_EVENT0("webrtc", "VideoReceiver2::Decode");
// Change decoder if payload type has changed
VCMGenericDecoder* decoder =
codecDataBase_.GetDecoder(*frame, &decodedFrameCallback_); //注意这里
if (decoder == nullptr) {
return VCM_NO_CODEC_REGISTERED;
}
return decoder->Decode(*frame, clock_->TimeInMilliseconds()); //注意这里 VCMGenericDecoder::Decode
}
VCMGenericDecoder* VCMDecoderDataBase::GetDecoder(
const VCMEncodedFrame& frame,
VCMDecodedFrameCallback* decoded_frame_callback) {
RTC_DCHECK(decoded_frame_callback->UserReceiveCallback());
uint8_t payload_type = frame.PayloadType();
if (payload_type == receive_codec_.plType || payload_type == 0) {
return ptr_decoder_.get();
}
// If decoder exists - delete.
if (ptr_decoder_) {
ptr_decoder_.reset();
memset(&receive_codec_, 0, sizeof(VideoCodec));
}
ptr_decoder_ = CreateAndInitDecoder(frame, &receive_codec_); //注意这里
if (!ptr_decoder_) {
return nullptr;
}
VCMReceiveCallback* callback = decoded_frame_callback->UserReceiveCallback();
callback->OnIncomingPayloadType(receive_codec_.plType); //注意这里
if (ptr_decoder_->RegisterDecodeCompleteCallback(decoded_frame_callback) < //注意这里
0) {
ptr_decoder_.reset();
memset(&receive_codec_, 0, sizeof(VideoCodec));
return nullptr;
}
return ptr_decoder_.get();
}
std::unique_ptr VCMDecoderDataBase::CreateAndInitDecoder(
const VCMEncodedFrame& frame,
VideoCodec* new_codec) const {
uint8_t payload_type = frame.PayloadType();
RTC_LOG(LS_INFO) << "Initializing decoder with payload type '"
<< static_cast(payload_type) << "'.";
RTC_DCHECK(new_codec);
const VCMDecoderMapItem* decoder_item = FindDecoderItem(payload_type);
if (!decoder_item) {
RTC_LOG(LS_ERROR) << "Can't find a decoder associated with payload type: "
<< static_cast(payload_type);
return nullptr;
}
std::unique_ptr ptr_decoder;
const VCMExtDecoderMapItem* external_dec_item =
FindExternalDecoderItem(payload_type);
if (external_dec_item) {
// External codec.
ptr_decoder.reset(new VCMGenericDecoder(
external_dec_item->external_decoder_instance, true)); // 将 external_dec_item->external_decoder_instance 传递到 VCMGenericDecoder 中的 std::unique_ptr decoder_ 成员变量中,external_dec_item->external_decoder_instance 可以是webrtc::LibvpxVp8Decoder、webrtc::VP9DecoderImpl、webrtc::H264DecoderImpl
} else {
RTC_LOG(LS_ERROR) << "No decoder of this type exists.";
}
if (!ptr_decoder)
return nullptr;
// Copy over input resolutions to prevent codec reinitialization due to
// the first frame being of a different resolution than the database values.
// This is best effort, since there's no guarantee that width/height have been
// parsed yet (and may be zero).
if (frame.EncodedImage()._encodedWidth > 0 &&
frame.EncodedImage()._encodedHeight > 0) {
decoder_item->settings->width = frame.EncodedImage()._encodedWidth;
decoder_item->settings->height = frame.EncodedImage()._encodedHeight;
}
if (ptr_decoder->InitDecode(decoder_item->settings.get(), // VCMGenericDecoder::InitDecode 里面会有进一步的多态操作 decoder_->InitDecode(settings, numberOfCores)
decoder_item->number_of_cores) < 0) {
return nullptr;
}
memcpy(new_codec, decoder_item->settings.get(), sizeof(VideoCodec));
return ptr_decoder;
}
int32_t VCMGenericDecoder::Decode(const VCMEncodedFrame& frame, int64_t nowMs) {
TRACE_EVENT1("webrtc", "VCMGenericDecoder::Decode", "timestamp",
frame.Timestamp());
_frameInfos[_nextFrameInfoIdx].decodeStartTimeMs = nowMs;
_frameInfos[_nextFrameInfoIdx].renderTimeMs = frame.RenderTimeMs();
_frameInfos[_nextFrameInfoIdx].rotation = frame.rotation();
_frameInfos[_nextFrameInfoIdx].timing = frame.video_timing();
_frameInfos[_nextFrameInfoIdx].ntp_time_ms =
frame.EncodedImage().ntp_time_ms_;
_frameInfos[_nextFrameInfoIdx].packet_infos = frame.PacketInfos();
// Set correctly only for key frames. Thus, use latest key frame
// content type. If the corresponding key frame was lost, decode will fail
// and content type will be ignored.
if (frame.FrameType() == VideoFrameType::kVideoFrameKey) {
_frameInfos[_nextFrameInfoIdx].content_type = frame.contentType();
_last_keyframe_content_type = frame.contentType();
} else {
_frameInfos[_nextFrameInfoIdx].content_type = _last_keyframe_content_type;
}
_callback->Map(frame.Timestamp(), &_frameInfos[_nextFrameInfoIdx]);
_nextFrameInfoIdx = (_nextFrameInfoIdx + 1) % kDecoderFrameMemoryLength;
int32_t ret = decoder_->Decode(frame.EncodedImage(), frame.MissingFrame(), // decoder_ 是直接从构造函数的参数中传递进来的
frame.RenderTimeMs());
_callback->OnDecoderImplementationName(decoder_->ImplementationName()); // VCMDecodedFrameCallback::OnDecoderImplementationName
if (ret < WEBRTC_VIDEO_CODEC_OK) {
RTC_LOG(LS_WARNING) << "Failed to decode frame with timestamp "
<< frame.Timestamp() << ", error code: " << ret;
_callback->Pop(frame.Timestamp());
return ret;
} else if (ret == WEBRTC_VIDEO_CODEC_NO_OUTPUT) {
// No output
_callback->Pop(frame.Timestamp());
}
return ret;
}
//以VP8的解码为例
int LibvpxVp8Decoder::Decode(const EncodedImage& input_image,
bool missing_frames,
int64_t /*render_time_ms*/) {
if (!inited_) {
return WEBRTC_VIDEO_CODEC_UNINITIALIZED;
}
if (decode_complete_callback_ == NULL) {
return WEBRTC_VIDEO_CODEC_UNINITIALIZED;
}
if (input_image.data() == NULL && input_image.size() > 0) {
// Reset to avoid requesting key frames too often.
if (propagation_cnt_ > 0)
propagation_cnt_ = 0;
return WEBRTC_VIDEO_CODEC_ERR_PARAMETER;
}
// Post process configurations.
#if defined(WEBRTC_ARCH_ARM) || defined(WEBRTC_ARCH_ARM64) || \
defined(WEBRTC_ANDROID)
if (use_postproc_arm_) {
vp8_postproc_cfg_t ppcfg;
ppcfg.post_proc_flag = VP8_MFQE;
// For low resolutions, use stronger deblocking filter.
int last_width_x_height = last_frame_width_ * last_frame_height_;
if (last_width_x_height > 0 && last_width_x_height <= 320 * 240) {
// Enable the deblock and demacroblocker based on qp thresholds.
RTC_DCHECK(qp_smoother_);
int qp = qp_smoother_->GetAvg();
if (qp > deblock_.min_qp) {
int level = deblock_.max_level;
if (qp < deblock_.degrade_qp) {
// Use lower level.
level = deblock_.max_level * (qp - deblock_.min_qp) /
(deblock_.degrade_qp - deblock_.min_qp);
}
// Deblocking level only affects VP8_DEMACROBLOCK.
ppcfg.deblocking_level = std::max(level, 1);
ppcfg.post_proc_flag |= VP8_DEBLOCK | VP8_DEMACROBLOCK;
}
}
vpx_codec_control(decoder_, VP8_SET_POSTPROC, &ppcfg);
}
#else
vp8_postproc_cfg_t ppcfg;
// MFQE enabled to reduce key frame popping.
ppcfg.post_proc_flag = VP8_MFQE | VP8_DEBLOCK;
// For VGA resolutions and lower, enable the demacroblocker postproc.
if (last_frame_width_ * last_frame_height_ <= 640 * 360) {
ppcfg.post_proc_flag |= VP8_DEMACROBLOCK;
}
// Strength of deblocking filter. Valid range:[0,16]
ppcfg.deblocking_level = 3;
vpx_codec_control(decoder_, VP8_SET_POSTPROC, &ppcfg);
#endif
// Always start with a complete key frame.
if (key_frame_required_) {
if (input_image._frameType != VideoFrameType::kVideoFrameKey)
return WEBRTC_VIDEO_CODEC_ERROR;
// We have a key frame - is it complete?
if (input_image._completeFrame) {
key_frame_required_ = false;
} else {
return WEBRTC_VIDEO_CODEC_ERROR;
}
}
// Restrict error propagation using key frame requests.
// Reset on a key frame refresh.
if (input_image._frameType == VideoFrameType::kVideoFrameKey &&
input_image._completeFrame) {
propagation_cnt_ = -1;
// Start count on first loss.
} else if ((!input_image._completeFrame || missing_frames) &&
propagation_cnt_ == -1) {
propagation_cnt_ = 0;
}
if (propagation_cnt_ >= 0) {
propagation_cnt_++;
}
vpx_codec_iter_t iter = NULL;
vpx_image_t* img;
int ret;
// Check for missing frames.
if (missing_frames) {
// Call decoder with zero data length to signal missing frames.
if (vpx_codec_decode(decoder_, NULL, 0, 0, kDecodeDeadlineRealtime)) {
// Reset to avoid requesting key frames too often.
if (propagation_cnt_ > 0)
propagation_cnt_ = 0;
return WEBRTC_VIDEO_CODEC_ERROR;
}
img = vpx_codec_get_frame(decoder_, &iter);
iter = NULL;
}
const uint8_t* buffer = input_image.data();
if (input_image.size() == 0) {
buffer = NULL; // Triggers full frame concealment.
}
if (vpx_codec_decode(decoder_, buffer, input_image.size(), 0,
kDecodeDeadlineRealtime)) {
// Reset to avoid requesting key frames too often.
if (propagation_cnt_ > 0) {
propagation_cnt_ = 0;
}
return WEBRTC_VIDEO_CODEC_ERROR;
}
img = vpx_codec_get_frame(decoder_, &iter);
int qp;
vpx_codec_err_t vpx_ret =
vpx_codec_control(decoder_, VPXD_GET_LAST_QUANTIZER, &qp);
RTC_DCHECK_EQ(vpx_ret, VPX_CODEC_OK);
ret = ReturnFrame(img, input_image.Timestamp(), qp, input_image.ColorSpace()); //注意这里
if (ret != 0) {
// Reset to avoid requesting key frames too often.
if (ret < 0 && propagation_cnt_ > 0)
propagation_cnt_ = 0;
return ret;
}
// Check Vs. threshold
if (propagation_cnt_ > kVp8ErrorPropagationTh) {
// Reset to avoid requesting key frames too often.
propagation_cnt_ = 0;
return WEBRTC_VIDEO_CODEC_ERROR;
}
return WEBRTC_VIDEO_CODEC_OK;
}
int LibvpxVp8Decoder::ReturnFrame(
const vpx_image_t* img,
uint32_t timestamp,
int qp,
const webrtc::ColorSpace* explicit_color_space) {
if (img == NULL) {
// Decoder OK and NULL image => No show frame
return WEBRTC_VIDEO_CODEC_NO_OUTPUT;
}
if (qp_smoother_) {
if (last_frame_width_ != static_cast(img->d_w) ||
last_frame_height_ != static_cast(img->d_h)) {
qp_smoother_->Reset();
}
qp_smoother_->Add(qp);
}
last_frame_width_ = img->d_w;
last_frame_height_ = img->d_h;
// Allocate memory for decoded image.
rtc::scoped_refptr buffer =
buffer_pool_.CreateBuffer(img->d_w, img->d_h);
if (!buffer.get()) {
// Pool has too many pending frames.
RTC_HISTOGRAM_BOOLEAN("WebRTC.Video.LibvpxVp8Decoder.TooManyPendingFrames",
1);
return WEBRTC_VIDEO_CODEC_NO_OUTPUT;
}
libyuv::I420Copy(img->planes[VPX_PLANE_Y], img->stride[VPX_PLANE_Y],
img->planes[VPX_PLANE_U], img->stride[VPX_PLANE_U],
img->planes[VPX_PLANE_V], img->stride[VPX_PLANE_V],
buffer->MutableDataY(), buffer->StrideY(),
buffer->MutableDataU(), buffer->StrideU(),
buffer->MutableDataV(), buffer->StrideV(), img->d_w,
img->d_h);
VideoFrame decoded_image = VideoFrame::Builder()
.set_video_frame_buffer(buffer)
.set_timestamp_rtp(timestamp)
.set_color_space(explicit_color_space)
.build();
decode_complete_callback_->Decoded(decoded_image, absl::nullopt, qp); // decode_complete_callback_ 就是 webrtc::VideoReceiver2 成员变量 decodedFrameCallback_ 对象的地址
return WEBRTC_VIDEO_CODEC_OK;
}
void VCMDecodedFrameCallback::Decoded(VideoFrame& decodedImage,
absl::optional decode_time_ms,
absl::optional qp) {
// Wait some extra time to simulate a slow decoder.
if (_extra_decode_time) {
rtc::Thread::SleepMs(_extra_decode_time->ms());
}
RTC_DCHECK(_receiveCallback) << "Callback must not be null at this point";
TRACE_EVENT_INSTANT1("webrtc", "VCMDecodedFrameCallback::Decoded",
"timestamp", decodedImage.timestamp());
// TODO(holmer): We should improve this so that we can handle multiple
// callbacks from one call to Decode().
VCMFrameInformation* frameInfo;
{
rtc::CritScope cs(&lock_);
frameInfo = _timestampMap.Pop(decodedImage.timestamp());
}
if (frameInfo == NULL) {
RTC_LOG(LS_WARNING) << "Too many frames backed up in the decoder, dropping "
"this one.";
_receiveCallback->OnDroppedFrames(1);
return;
}
decodedImage.set_ntp_time_ms(frameInfo->ntp_time_ms);
decodedImage.set_packet_infos(frameInfo->packet_infos);
decodedImage.set_rotation(frameInfo->rotation);
const int64_t now_ms = _clock->TimeInMilliseconds();
if (!decode_time_ms) {
decode_time_ms = now_ms - frameInfo->decodeStartTimeMs;
}
_timing->StopDecodeTimer(*decode_time_ms, now_ms);
// Report timing information.
TimingFrameInfo timing_frame_info;
if (frameInfo->timing.flags != VideoSendTiming::kInvalid) {
int64_t capture_time_ms = decodedImage.ntp_time_ms() - ntp_offset_;
// Convert remote timestamps to local time from ntp timestamps.
frameInfo->timing.encode_start_ms -= ntp_offset_;
frameInfo->timing.encode_finish_ms -= ntp_offset_;
frameInfo->timing.packetization_finish_ms -= ntp_offset_;
frameInfo->timing.pacer_exit_ms -= ntp_offset_;
frameInfo->timing.network_timestamp_ms -= ntp_offset_;
frameInfo->timing.network2_timestamp_ms -= ntp_offset_;
int64_t sender_delta_ms = 0;
if (decodedImage.ntp_time_ms() < 0) {
// Sender clock is not estimated yet. Make sure that sender times are all
// negative to indicate that. Yet they still should be relatively correct.
sender_delta_ms =
std::max({capture_time_ms, frameInfo->timing.encode_start_ms,
frameInfo->timing.encode_finish_ms,
frameInfo->timing.packetization_finish_ms,
frameInfo->timing.pacer_exit_ms,
frameInfo->timing.network_timestamp_ms,
frameInfo->timing.network2_timestamp_ms}) +
1;
}
timing_frame_info.capture_time_ms = capture_time_ms - sender_delta_ms;
timing_frame_info.encode_start_ms =
frameInfo->timing.encode_start_ms - sender_delta_ms;
timing_frame_info.encode_finish_ms =
frameInfo->timing.encode_finish_ms - sender_delta_ms;
timing_frame_info.packetization_finish_ms =
frameInfo->timing.packetization_finish_ms - sender_delta_ms;
timing_frame_info.pacer_exit_ms =
frameInfo->timing.pacer_exit_ms - sender_delta_ms;
timing_frame_info.network_timestamp_ms =
frameInfo->timing.network_timestamp_ms - sender_delta_ms;
timing_frame_info.network2_timestamp_ms =
frameInfo->timing.network2_timestamp_ms - sender_delta_ms;
}
timing_frame_info.flags = frameInfo->timing.flags;
timing_frame_info.decode_start_ms = frameInfo->decodeStartTimeMs;
timing_frame_info.decode_finish_ms = now_ms;
timing_frame_info.render_time_ms = frameInfo->renderTimeMs;
timing_frame_info.rtp_timestamp = decodedImage.timestamp();
timing_frame_info.receive_start_ms = frameInfo->timing.receive_start_ms;
timing_frame_info.receive_finish_ms = frameInfo->timing.receive_finish_ms;
_timing->SetTimingFrameInfo(timing_frame_info);
decodedImage.set_timestamp_us(frameInfo->renderTimeMs *
rtc::kNumMicrosecsPerMillisec);
_receiveCallback->FrameToRender(decodedImage, qp, *decode_time_ms, // _receiveCallback 就是 webrtc::VideoStreamDecoder 的指针
frameInfo->content_type);
}
int32_t VideoStreamDecoder::FrameToRender(VideoFrame& video_frame,
absl::optional qp,
int32_t decode_time_ms,
VideoContentType content_type) {
receive_stats_callback_->OnDecodedFrame(video_frame, qp, decode_time_ms, //
content_type);
incoming_video_stream_->OnFrame(video_frame); // 在 VideoReceiveStream::Start 中的分析可知,incoming_video_stream_ 实际上指向的是 IncomingVideoStream
return 0;
}
void IncomingVideoStream::OnFrame(const VideoFrame& video_frame) {
TRACE_EVENT0("webrtc", "IncomingVideoStream::OnFrame");
RTC_CHECK_RUNS_SERIALIZED(&decoder_race_checker_);
RTC_DCHECK(!incoming_render_queue_.IsCurrent());
// TODO(srte): Using video_frame = std::move(video_frame) would move the frame
// into the lambda instead of copying it, but it doesn't work unless we change
// OnFrame to take its frame argument by value instead of const reference.
incoming_render_queue_.PostTask([this, video_frame = video_frame]() mutable { // 放到单独的线程中进行处理
RTC_DCHECK(incoming_render_queue_.IsCurrent());
if (render_buffers_.AddFrame(std::move(video_frame)) == 1)
Dequeue(); //
});
}
void IncomingVideoStream::Dequeue() {
TRACE_EVENT0("webrtc", "IncomingVideoStream::Dequeue");
RTC_DCHECK(incoming_render_queue_.IsCurrent());
absl::optional frame_to_render = render_buffers_.FrameToRender();
if (frame_to_render)
callback_->OnFrame(*frame_to_render); // callback_ 实际指向的是 webrtc::internal::VideoReceiveStream
if (render_buffers_.HasPendingFrames()) {
uint32_t wait_time = render_buffers_.TimeToNextFrameRelease();
incoming_render_queue_.PostDelayedTask([this]() { Dequeue(); }, wait_time);
}
}
void VideoReceiveStream::OnFrame(const VideoFrame& video_frame) {
int64_t sync_offset_ms;
double estimated_freq_khz;
// TODO(tommi): GetStreamSyncOffsetInMs grabs three locks. One inside the
// function itself, another in GetChannel() and a third in
// GetPlayoutTimestamp. Seems excessive. Anyhow, I'm assuming the function
// succeeds most of the time, which leads to grabbing a fourth lock.
if (rtp_stream_sync_.GetStreamSyncOffsetInMs(
video_frame.timestamp(), video_frame.render_time_ms(),
&sync_offset_ms, &estimated_freq_khz)) {
// TODO(tommi): OnSyncOffsetUpdated grabs a lock.
stats_proxy_.OnSyncOffsetUpdated(sync_offset_ms, estimated_freq_khz);
}
source_tracker_.OnFrameDelivered(video_frame.packet_infos());
config_.renderer->OnFrame(video_frame); // VideoReceiveStream 中的 config_ 来自 WebRtcVideoChannel::WebRtcVideoReceiveStream 中的 config_ 成员变量
// config_.renderer 就是 WebRtcVideoChannel::WebRtcVideoReceiveStream 的 this 指针
// TODO(tommi): OnRenderFrame grabs a lock too.
stats_proxy_.OnRenderedFrame(video_frame);
}
void WebRtcVideoChannel::WebRtcVideoReceiveStream::OnFrame(
const webrtc::VideoFrame& frame) {
rtc::CritScope crit(&sink_lock_);
int64_t time_now_ms = rtc::TimeMillis();
if (first_frame_timestamp_ < 0)
first_frame_timestamp_ = time_now_ms;
int64_t elapsed_time_ms = time_now_ms - first_frame_timestamp_;
if (frame.ntp_time_ms() > 0)
estimated_remote_start_ntp_time_ms_ = frame.ntp_time_ms() - elapsed_time_ms;
if (sink_ == NULL) {
RTC_LOG(LS_WARNING) << "VideoReceiveStream not connected to a VideoSink.";
return;
}
sink_->OnFrame(frame); //注意这里
}
PeerConnection::ApplyRemoteDescription
===>
transceiver->internal()->receiver_internal()->SetupMediaChannel(ssrc);// transceiver->internal() 返回的是指向 RtpTransceiver 的指针
//RtpTransceiver::receiver_internal()返回的实际上就是 webrtc:::VideoRtpReceiver
void VideoRtpReceiver::SetupMediaChannel(uint32_t ssrc) {
if (!media_channel_) {
RTC_LOG(LS_ERROR)
<< "VideoRtpReceiver::SetupMediaChannel: No video channel exists.";
}
RestartMediaChannel(ssrc); //注意这里
}
void VideoRtpReceiver::RestartMediaChannel(absl::optional ssrc) {
RTC_DCHECK(media_channel_);
if (!stopped_ && ssrc_ == ssrc) {
return;
}
if (!stopped_) {
SetSink(nullptr);
}
stopped_ = false;
ssrc_ = ssrc;
SetSink(source_->sink()); //source_->sink() 就是 VideoRtpTrackSource::sink(),也就是设置的 VideoBroadcaster 指针
// Attach any existing frame decryptor to the media channel.
MaybeAttachFrameDecryptorToMediaChannel(
ssrc, worker_thread_, frame_decryptor_, media_channel_, stopped_);
// TODO(bugs.webrtc.org/8694): Stop using 0 to mean unsignalled SSRC
// value.
delay_->OnStart(media_channel_, ssrc.value_or(0));
}
bool VideoRtpReceiver::SetSink(rtc::VideoSinkInterface* sink) {
RTC_DCHECK(media_channel_);
RTC_DCHECK(!stopped_);
return worker_thread_->Invoke(RTC_FROM_HERE, [&] {
// TODO(bugs.webrtc.org/8694): Stop using 0 to mean unsignalled SSRC
return media_channel_->SetSink(ssrc_.value_or(0), sink); //注意这里
});
}
bool WebRtcVideoChannel::SetSink(
uint32_t ssrc,
rtc::VideoSinkInterface* sink) {
RTC_DCHECK_RUN_ON(&thread_checker_);
RTC_LOG(LS_INFO) << "SetSink: ssrc:" << ssrc << " "
<< (sink ? "(ptr)" : "nullptr");
if (ssrc == 0) {
default_unsignalled_ssrc_handler_.SetDefaultSink(this, sink);
return true;
}
std::map::iterator it =
receive_streams_.find(ssrc); //注意这里
if (it == receive_streams_.end()) {
return false;
}
it->second->SetSink(sink); //注意这里
return true;
}
void WebRtcVideoChannel::WebRtcVideoReceiveStream::SetSink(
rtc::VideoSinkInterface* sink) {
rtc::CritScope crit(&sink_lock_);
sink_ = sink; //注意这里
}
void VideoBroadcaster::OnFrame(const webrtc::VideoFrame& frame) {
rtc::CritScope cs(&sinks_and_wants_lock_);
bool current_frame_was_discarded = false;
for (auto& sink_pair : sink_pairs()) {
if (sink_pair.wants.rotation_applied &&
frame.rotation() != webrtc::kVideoRotation_0) {
// Calls to OnFrame are not synchronized with changes to the sink wants.
// When rotation_applied is set to true, one or a few frames may get here
// with rotation still pending. Protect sinks that don't expect any
// pending rotation.
RTC_LOG(LS_VERBOSE) << "Discarding frame with unexpected rotation.";
sink_pair.sink->OnDiscardedFrame();
current_frame_was_discarded = true;
continue;
}
if (sink_pair.wants.black_frames) {
webrtc::VideoFrame black_frame =
webrtc::VideoFrame::Builder()
.set_video_frame_buffer(
GetBlackFrameBuffer(frame.width(), frame.height()))
.set_rotation(frame.rotation())
.set_timestamp_us(frame.timestamp_us())
.set_id(frame.id())
.build();
sink_pair.sink->OnFrame(black_frame);
} else if (!previous_frame_sent_to_all_sinks_) {
// Since last frame was not sent to some sinks, full update is needed.
webrtc::VideoFrame copy = frame;
copy.set_update_rect(
webrtc::VideoFrame::UpdateRect{0, 0, frame.width(), frame.height()});
sink_pair.sink->OnFrame(copy);
} else {
sink_pair.sink->OnFrame(frame); //VideoRenderer::OnFrame
}
}
previous_frame_sent_to_all_sinks_ = !current_frame_was_discarded;
}