STM32生成互补PWM波(输出前均为低电平)
STM32的定时器功能很多,今天介绍一下生成互补PWM波形。STM32高级定时器1和8的时钟是168MHZ。通用定时器通常是84MHZ。
频率通用设置
定时器时钟频率设置的通用写法。一般我们都是设置两个参数,分频系数和自动重装载值,
但是其实我们可以对其代码可以做进一步封装,直接频率作为参数传入,然后里面通过频率再计算分频系数和自动重装载值。
void TimerInit(u32 Frequency)
{
u32 Prescalar;
u32 Period;
if(Frequency>=16 && Frequency<500000)
{
Prescalar = 84;
Period = SystemCoreClock/168/Frequency;
}
else if(Frequency<16)
{
Prescalar = 8400;
Period = SystemCoreClock/168/100/Frequency;
}
else
{
Prescalar = 1;
Period = SystemCoreClock/2/Frequency;
}
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitTypeDefStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_DeInit(TIM3);
TIM_TimeBaseInitTypeDefStructure.TIM_Period=(Period-1);
TIM_TimeBaseInitTypeDefStructure.TIM_Prescaler=(Prescalar -1);
TIM_TimeBaseInitTypeDefStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitTypeDefStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitTypeDefStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //外部中断8
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x00; //抢占优先级1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
TIM_Cmd(TIM3,DISABLE);
}
互补PWM波形产生
在输出PWM波形之前,首先需要找到哪些引脚可以复用为定时器,产生PWM波形,在原理图上其实特别好找。

找到之后,就可以直接写代码了,相比定时器设置的时候多了一个结构体设TIM_OCInitTypeDef,负责PWM波形的设置。笔者这里以定时器1的123通道为例。
u32 Prescalar;
u32 Period;
if(Frequency>=16 && Frequency<500000)
{
Prescalar = 168;
Period = SystemCoreClock/168/Frequency;
}
else if(Frequency<16)
{
Prescalar = 16800;
Period = SystemCoreClock/168/100/Frequency;
}
else
{
Prescalar = 1;
Period = SystemCoreClock/Frequency;
}
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_BDTRInitTypeDef TIM_BDTRStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE); //TIM1时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能PORTA时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); //使能PORTA时钟
GPIO_PinAFConfig(GPIOA,GPIO_PinSource8,GPIO_AF_TIM1); //GPIOA8复用为定时器1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource11,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource13,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource14,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource15,GPIO_AF_TIM1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10|GPIO_Pin_11; //GPIOA8
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA8
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //上拉
GPIO_Init(GPIOB,&GPIO_InitStructure);
TIM_DeInit(TIM1);
TIM_TimeBaseStructure.TIM_Prescaler=Prescalar-1; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=Period -1; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);//初始化定时器1
//初始化TIM1 Channel1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性低
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High ;//互补输出极性
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;//指定空闲状态下的TIM输出比较的引脚状态。
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;//指定空闲状态下的TIM互补输出比较的引脚状态。
TIM_OCInitStructure.TIM_Pulse = Period /2;
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OC4Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设 TIM1 4OC1
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OC2Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OC3Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器
TIM_ARRPreloadConfig(TIM1,ENABLE);//ARPE使能
TIM_CtrlPWMOutputs(TIM1,ENABLE); //输出使能,高级定时器特有的函数,通用定时器没有。
TIM_Cmd(TIM1, ENABLE);//使能TIM1
输出的波形如下:
死区设置
如果需要使用PWM波形控制MOS管的开断,为防止同臂桥导通,就需要设置死区,正好高级定时器支持设置死区时间,笔者也整理成通用的代码,直接设置DeadTime即可设置死区时间,以ns为单位。
直接在上面的代码后面加上以下代码即可设置死区时间。
if(DeadTime<755)
{
SetTime=DeadTime/5.95;
}
else if(DeadTime>761&&DeadTime<1511)
{
SetTime=DeadTime/11.9-64+128;
}
else if(DeadTime>1511&&DeadTime<2973)
{
SetTime=DeadTime/47.2-32+192;
}
else if(DeadTime>3020&&DeadTime<5947)
{
SetTime=DeadTime/94.4-32+224;
}
TIM_BDTRStructure.TIM_AutomaticOutput=TIM_AutomaticOutput_Enable;// 自动输出功能使能??
TIM_BDTRStructure.TIM_Break=TIM_Break_Disable; //失能刹车输入
TIM_BDTRStructure.TIM_BreakPolarity=TIM_BreakPolarity_High; //刹车输入管脚极性高?
TIM_BDTRStructure.TIM_DeadTime=SetTime; //输出打开和关闭状态之间的延时
TIM_BDTRStructure.TIM_LOCKLevel=TIM_LOCKLevel_OFF; // 锁电平参数: 不锁任何位
TIM_BDTRStructure.TIM_OSSIState=TIM_OSSIState_Disable; //设置在空闲模式下非工作状态选项
TIM_BDTRStructure.TIM_OSSRState=TIM_OSSRState_Disable; //设置在运行模式下非工作状态选项
TIM_BDTRConfig(TIM1,&TIM_BDTRStructure);
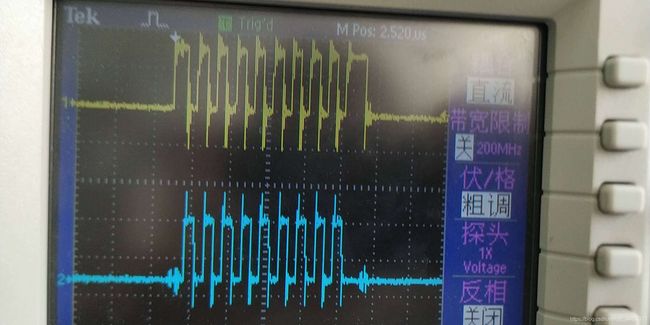
产生的互补波形如下,死区时间是:50ns

生成特定个数的PWM波形
定时器里面提供一个函数,可以直接设置波形的个数,定时器结构体里面有个参数可以设置脉冲个数,即单脉冲模式。
TIM_TimeBaseStructure.TIM_RepetitionCounter=PulseNum;
TIM_SelectOnePulseMode(TIM1,TIM_OPMode_Single);
通过上面两个函数就可以生成特定个数得波形个数。下次如果需要再生成需要重新启动定时器。
//部分代码
TIM_TimeBaseStructure.TIM_Prescaler=Prescalar; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=Period-1; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_RepetitionCounter=PulseNum; //脉冲个数
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);//初始化定时器1
TIM_SelectOnePulseMode(TIM1,TIM_OPMode_Single);
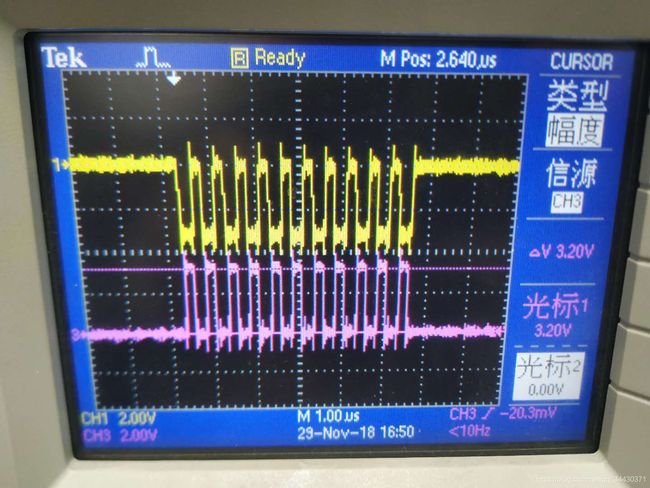
特定个数的PMM波形。

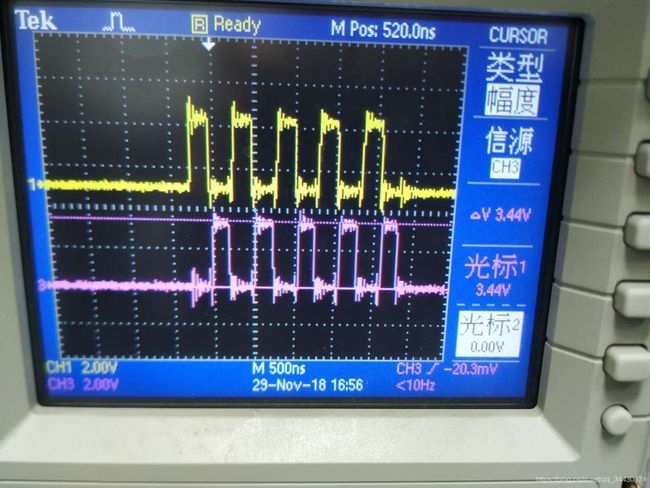
输出前均为低电平的互补PWM波形
很多时候,互补PWM波形作为Mos管的开关信号,需要在输出前为低电平。
但是STM32输出的PWM波形是互补的,必然两个波形中必然有一段时间是高电平的,即使在配置的时候,可以设置波形的极性和空闲状态,但是还是无用,无法设置成想要的波形。
下图为Mos管电路,需要PWM波形来控制。

控制的波形信号。

如果我们可以改变IO的状态,那么在输出前后改变成IO状态之后,就可以拉低电平,就可以实现输出前均为低电平的互补波形。
在控制的时候,一般是设置固定的脉冲个数,所以还需要定时器在PWM波形输出完成之后,关闭定时器。
所以具体的设计思路就出来了:
1. STM32输出比较设置成单脉冲模型(特定个数),定时器1启动PWM之后,定时器2同时开始计时(利用定时器的波形个数来定时)。
2. 波形产生完毕之后,定时时间到,关闭定时器1,关闭定时器2,同时将IO模式变成普通模式,将电平拉低。
3. 同时如果要连续输出脉冲,所以需要定时器3做时间间隔定时。
u32 TIM1_PWM_Init(u32 Frequency,u16 DeadTime,u8 PulseNum)
{
//此部分需手动修改IO口设置
u32 arr=0;
u16 SetTime=0;
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_BDTRInitTypeDef TIM_BDTRStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE); //TIM1时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能PORTA时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); //使能PORTA时钟
GPIO_PinAFConfig(GPIOA,GPIO_PinSource8,GPIO_AF_TIM1); //GPIOA8复用为定时器1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource11,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource13,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource14,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOB,GPIO_PinSource15,GPIO_AF_TIM1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10|GPIO_Pin_11; //GPIOA8
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA8
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //上拉
GPIO_Init(GPIOB,&GPIO_InitStructure);
TIM_DeInit(TIM1);
arr=SystemCoreClock/Frequency;
TIM_TimeBaseStructure.TIM_Prescaler=0; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=arr-1; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_RepetitionCounter=PulseNum;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);//初始化定时器1
TIM_SelectOnePulseMode(TIM1,TIM_OPMode_Single);
//初始化TIM1 Channel1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性低
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High ;//互补输出极性
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;//指定空闲状态下的TIM输出比较的引脚状态。
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;//指定空闲状态下的TIM互补输出比较的引脚状态。
TIM_OCInitStructure.TIM_Pulse = arr/2;
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OC4Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OC2Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OC3Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 4OC1
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器
if(DeadTime<755)
{
SetTime=DeadTime/5.95;
}
else if(DeadTime>761&&DeadTime<1511)
{
SetTime=DeadTime/11.9-64+128;
}
else if(DeadTime>1511&&DeadTime<2973)
{
SetTime=DeadTime/47.2-32+192;
}
else if(DeadTime>3020&&DeadTime<5947)
{
SetTime=DeadTime/94.4-32+224;
}
TIM_BDTRStructure.TIM_AutomaticOutput=TIM_AutomaticOutput_Enable;// 自动输出功能使能??
TIM_BDTRStructure.TIM_Break=TIM_Break_Disable; //失能刹车输入
TIM_BDTRStructure.TIM_BreakPolarity=TIM_BreakPolarity_High; //刹车输入管脚极性高?
TIM_BDTRStructure.TIM_DeadTime=SetTime; //输出打开和关闭状态之间的延时
TIM_BDTRStructure.TIM_LOCKLevel=TIM_LOCKLevel_OFF; // 锁电平参数: 不锁任何位
TIM_BDTRStructure.TIM_OSSIState=TIM_OSSIState_Disable; //设置在空闲模式下非工作状态选项
TIM_BDTRStructure.TIM_OSSRState=TIM_OSSRState_Disable; //设置在运行模式下非工作状态选项
TIM_BDTRConfig(TIM1,&TIM_BDTRStructure);
TIM_ARRPreloadConfig(TIM1,ENABLE);//ARPE使能
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_Cmd(TIM1, DISABLE);//使能TIM1
return arr;
}
void SetPulseNum(u8 PulseNum) //设置脉冲个数
{
TIM1->RCR = PulseNum;
TIM_GenerateEvent(TIM1,TIM_EventSource_Update);
}
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET) //溢出中断
{
if(StartPWM_Flag) //开始产生PWM波形
{
if(Count1==Tim3Count) //定时间隔产生PWM波形
{
if(FirstEntryFlag!=0) //由于首次是复用模式,所以不用更改模式。
IOModeEnable();
TIM_Cmd(TIM1, ENABLE); //打开定时器1
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //允许定时器4更新中断
TIM_Cmd(TIM2,ENABLE); //打开定时器4
Count1=0;
FirstEntryFlag=1;
}
else
{
Count1++;
}
}
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位
}
void TIM2_IRQHandler(void)
{
//定时时间到
if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET) //溢出中断
{
TIM1->CR1 &= (uint16_t)~TIM_CR1_CEN; //关闭定时器1操作
IOModeDisable(); //IO模式
}
TIM_ClearITPendingBit(TIM2,TIM_IT_Update); //清除中断标志位
}
产生的波形如下: