船舶稳定性和静水力计算——绘图体平面图,静水力,GZ计算(Matlab代码实现)
欢迎来到本博客❤️❤️
博主优势:博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
本文目录如下:
目录
1 概述
2 运行结果
3 参考文献
4 Matlab代码实现

1 概述
船舶稳定性和静水力计算是船舶设计和运行中非常重要的一部分。其中,绘图体平面图、静水力和GZ计算是船舶稳定性分析的关键步骤。
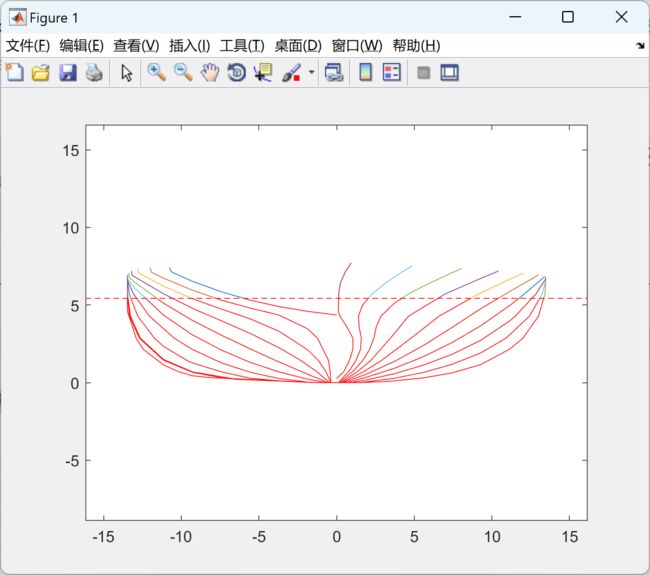
绘图体平面图是船舶稳定性计算的起点。它是通过绘制船舶的主要几何形状,包括船体的外形、船舱、货舱等,来建立船舶的平面图。绘图体平面图可以用来计算船舶的体积、质心位置等参数,从而进一步进行稳定性计算。
静水力是指船舶在静止状态下所受到的水力作用力。在船舶稳定性计算中,静水力是通过计算船舶在不同水线位置上的浮力和重力之差来得到的。这一步骤需要考虑船舶的几何形状、水线位置和浸没部分的体积等因素。
GZ计算是船舶稳定性计算的关键步骤之一。GZ表示船舶在侧倾时产生的抵抗矩。通过计算船舶在不同侧倾角度下的GZ值,可以得到船舶的稳定性曲线。这一步骤需要考虑船舶的几何形状、重心位置、浮力分布等因素。
综上所述,船舶稳定性和静水力计算涉及到绘图体平面图、静水力和GZ计算等重要步骤。这些计算可以帮助设计师和船舶操作人员评估船舶的稳定性和安全性,从而确保船舶在各种工况下的稳定性。
2 运行结果
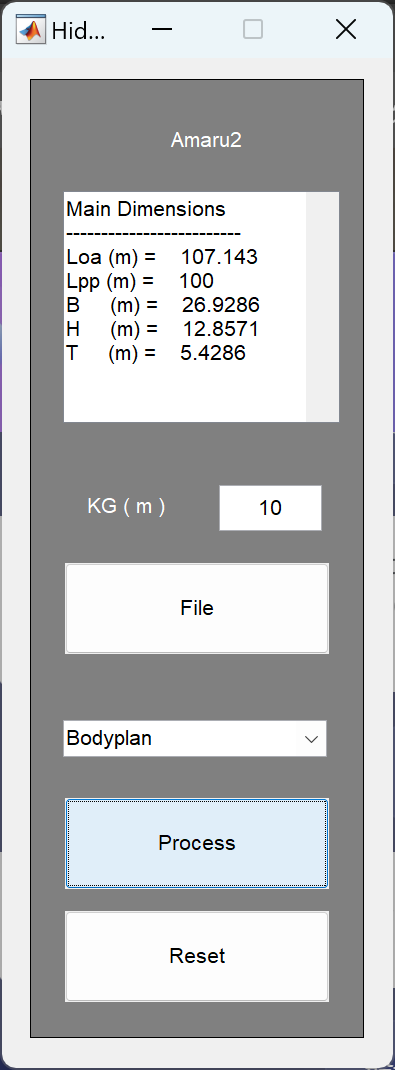
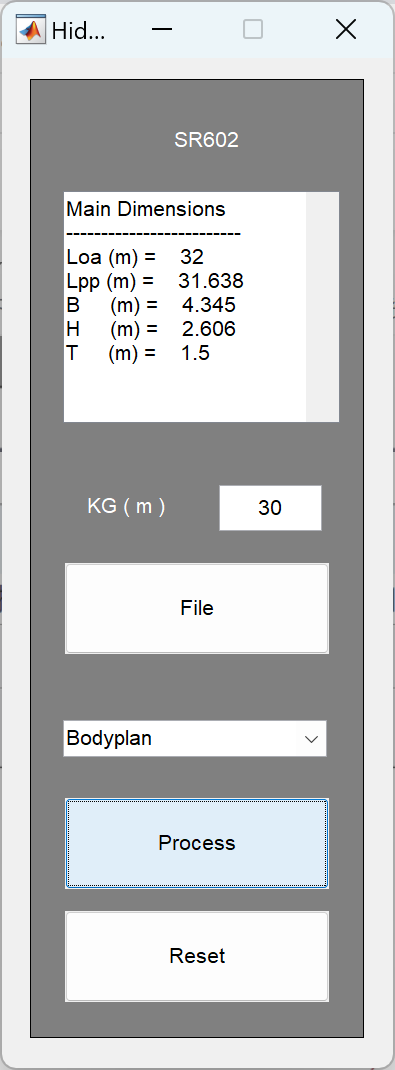

部分代码:
% --- Executes just before HidroMatik is made visible.
function HidroMatik_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to HidroMatik (see VARARGIN)
% Choose default command line output for HidroMatik
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes HidroMatik wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = HidroMatik_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on button press in pbBodyplan.
function pbBodyplan_Callback(hObject, eventdata, handles)
% hObject handle to pbBodyplan (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in pb3D.
function pb3D_Callback(hObject, eventdata, handles)
% hObject handle to pb3D (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in pbHidros.
function pbHidros_Callback(hObject, eventdata, handles)
% hObject handle to pbHidros (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in pbProses.
function pbProses_Callback(hObject, eventdata, handles)
% hObject handle to pbProses (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
global A UK KG Phideg GZ pilih
3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]宋晶晶.船舶静水力参数计算及曲线绘制研究[J].内燃机与配件, 2019(9):3.DOI:CNKI:SUN:NRPJ.0.2019-09-106.
[2]曹晶,陈明,孙永刚.基于CATIA的三维船舶静水力计算研究[J].中国舰船研究, 2011, 6(2):4.DOI:CNKI:SUN:JCZG.0.2011-02-006.
[3]郭建兵,杨关良.基于VC的B样条绘制船舶静水力曲线的研究与实现[J].舰船电子工程, 2009(1):4.DOI:10.3969/j.issn.1627-9730.2009.01.035.