【GAMES101】Lecture05,06 Rasterization 精要
【GAMES101】Lecture05,06 Rasterization 精要
-
-
- 透视投影中的视锥
-
- 视锥参数与长方体顶点坐标的转化
- 光栅化(Rasterization)
-
- 屏幕空间
- 从标准立方体(Canonical Cube)到XY屏幕(Screen)的变换——视口(Viewport)变换
- 三角形网格
- 用像素值近似投影至屏幕的三角形——采样(Sampling)
- 走样(aliasing)与反走样(antialiasing)
-
-
- 反走样策略1:增加采样率
- 反走样策略2:对信号进行模糊,然后采样
-
- Visibility / Occlusion
-
- Painter's Algorithm vs. Z-Buffer
-
本文图片来源于GAMES101课件。
注:本课程中所有变换都是建立在右手系的基础上的。
透视投影中的视锥
上一讲中我们知道,透视投影分为挤压(squish)与正交投影两步——前者将截锥体(frustum)压缩为以近平面为底面的长方体中(可以用6个参数 n , f , l , r , b , t n,f,l,r,b,t n,f,l,r,b,t唯一确定),后者再将长方体映射至中心为原点的 [ − 1 , 1 ] 3 [-1,1]^3 [−1,1]3标准立方体中。
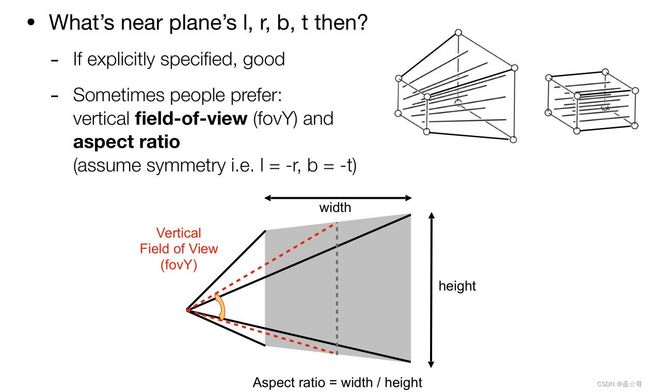
截锥体可由视锥以及远近平面的深度 f , n f,n f,n确定,而视锥需要以下两个参数确定:
-
近平面的宽 w w w和高 h h h确定的纵横比(aspect ratio): a s p e c t : = w h aspect:=\frac{w}{h} aspect:=hw;
-
垂直可视角(vertical field-of-view): f o v Y : = 2 arctan h / 2 ∣ n ∣ fovY:=2\arctan \frac{h/2}{\vert n \vert} fovY:=2arctan∣n∣h/2。( n < 0 n<0 n<0)
注:垂直可视角也可以换成水平可视角,两者地位等价,只需确定其一即可推得另一。
视锥参数与长方体顶点坐标的转化
这里已经假定z轴垂直贯穿以近平面为底的长方体中心了,即 − l = r > 0 , − b = t > 0 -l=r\gt0,-b=t\gt0 −l=r>0,−b=t>0。

光栅化(Rasterization)
Raster == screen in German
Rasterize == drawing onto the screen
屏幕空间
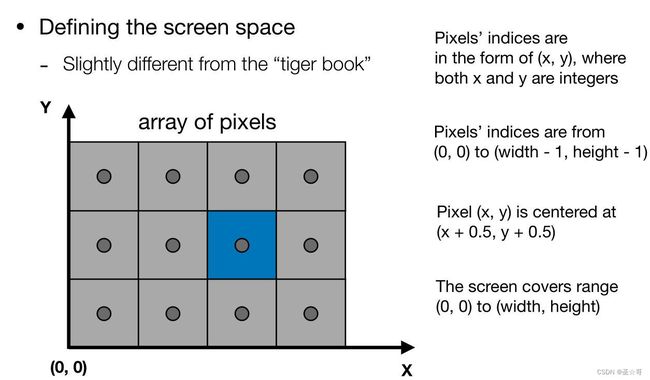
从标准立方体(Canonical Cube)到XY屏幕(Screen)的变换——视口(Viewport)变换
屏幕是二维的,故变换与z方向无关,XY屏幕变换过程即从 [ − 1 , 1 ] 2 [-1,1]^2 [−1,1]2到 [ 0 , w i d t h ] × [ 0 , h e i g h t ] [0,width]\times[0,height] [0,width]×[0,height],过程为先缩放,后平移左下角至 ( 0 , 0 ) (0,0) (0,0)。尽管如此,该变换仍然是三维空间的变换,故变换矩阵仍是 4 × 4 4\times4 4×4的。

至此相当于已经摆好pose,准备按快门,但仍然还没有形成照片,接下来就是将屏幕所见的连续画面打碎成离散的像素(栅格)。
三角形网格
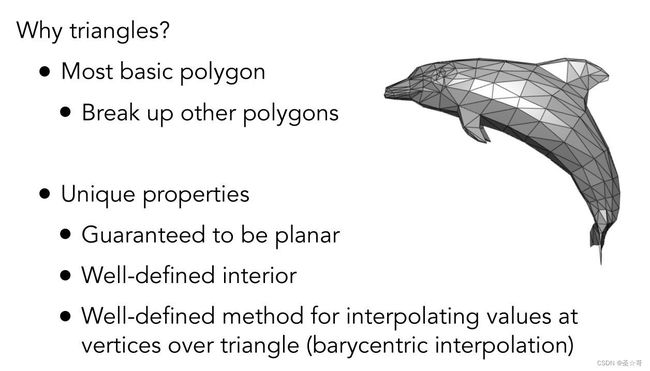
三角形具备一些优秀的性质使得它在图形学中运用广泛:
-
边最少的多边形,其余多边形都可以由它组成;
-
三角形一定构成一个平面,而不会出现扭曲;
-
三角形内部定义非常明确,它一定是凸多边形,而凹多边形会出现一系列繁琐的问题;
-
三角形内部任意位置的数值可以由三个顶点的数值计算获得(重心坐标系)。
用像素值近似投影至屏幕的三角形——采样(Sampling)
采样的定义:通常来说,函数的定义域连续(至少在我们感兴趣的范围内),采样过程就是在定义域中选择一些离散的值作为输入,从而获得一系列离散的函数值(输出)。简单来说,采样就是连续到离散的过程。
基本流程:对于像素 ( x , y ) (x,y) (x,y)的中心坐标 ( x + 0.5 , y + 0.5 ) (x+0.5,y+0.5) (x+0.5,y+0.5),判断其是否在三角形内部,若是,则将相应的值赋予位于 ( x , y ) (x,y) (x,y)的像素。
需要考虑的问题:
-
如何判断像素坐标点位于三角形内?—— 叉积;
-
屏幕中所有像素都需要执行上述步骤吗?—— 不需要,用包围盒即可减少不必要的计算,比如AABB(Axis-Aligned Bounding Box),可以取三角形顶点每个维度的最大最小值确定;
-
存在性能瓶颈吗?—— 当然,比如又瘦又斜的三角形,可以记录每一行的左右像素范围,从而节约时间开销,这时候有其他的方法:

-
能完美还原吗? —— 不行,因为像素有大小,存在锯齿(Jaggies),此现象又称为走样(aliasing),后面将会着重解决它;
走样(aliasing)与反走样(antialiasing)
采样的一些问题以及原因:
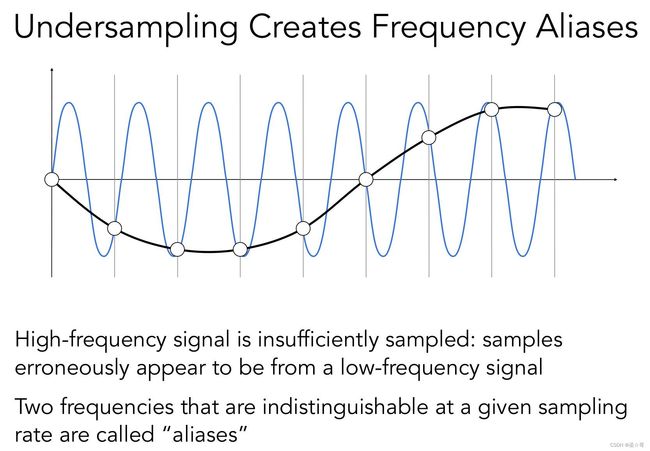
① 锯齿;② 摩尔纹(欠采样);③ 车轮效应(高速行驶下车轮出现逆时针转动)。
前两个问题是空间上的,第三个是时间上的。导致它们的原因在于信号的频率太高,但采样频率过低。
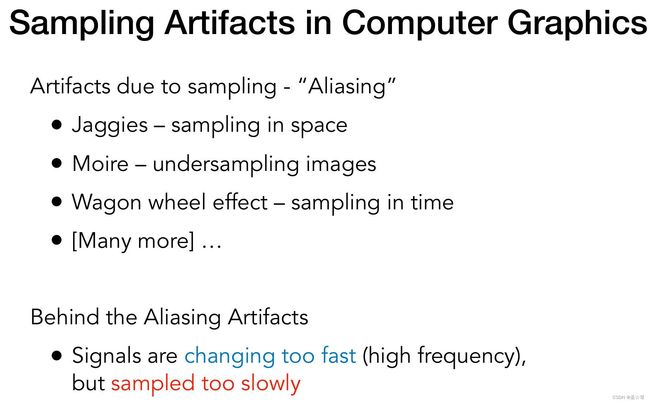
走样的定义:给定的一系列采样点存在多种不同频率的信号完美符合它,导致采样点看起来是来自低频信号的现象,通常原因是欠采样。
这里还讲了从时/空间域到频域的变换(Fourier Transform)以及逆变换(Fourier Inverse Transform)、滤波、卷积等数字图像处理相关的内容,这里只需知道画面主体是低频信号,画面细节(比如轮廓等)是高频信号,所谓模糊即滤去高频信号。
了解卷积定理的结论:空间域的卷积等价于频域的乘积,反过来,频域的卷积也等价于空间域的乘积。


Sampling is equivalent to “Repeating frequency contents”.
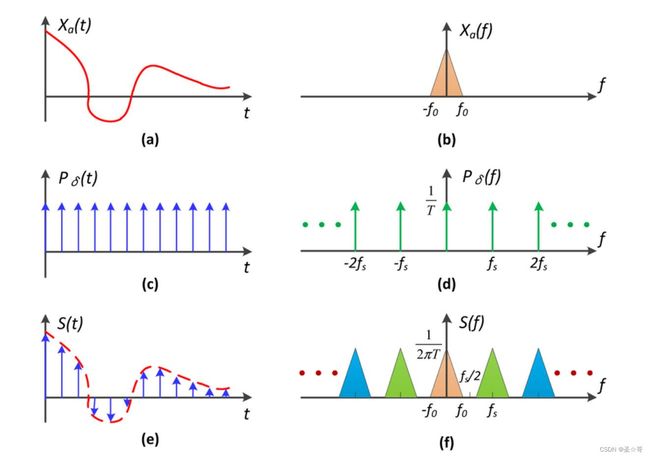
Aliasing is equivalent to “Mixed frequency contents”.
采样稀疏,对应采样频率就低,因而复制时更可能出现交错而导致走样。

反走样策略1:增加采样率
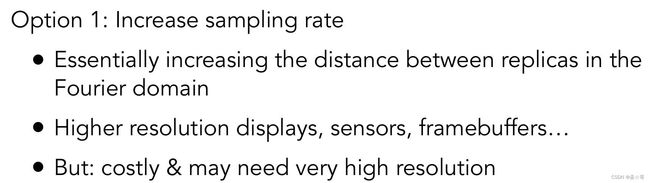
增加采样率,在频域上相当于把重复部分之间的距离增大,因而需要提高物理设备的分辨率。然而对于反走样策略来说,不可能对同一个设备进行这种改变,而且就算能更换,代价也比较大,故于此不作过多讨论。
反走样策略2:对信号进行模糊,然后采样

对于部分出现在一个像素格内的三角形,可以按照其在像素格中的面积占比来进行采样。
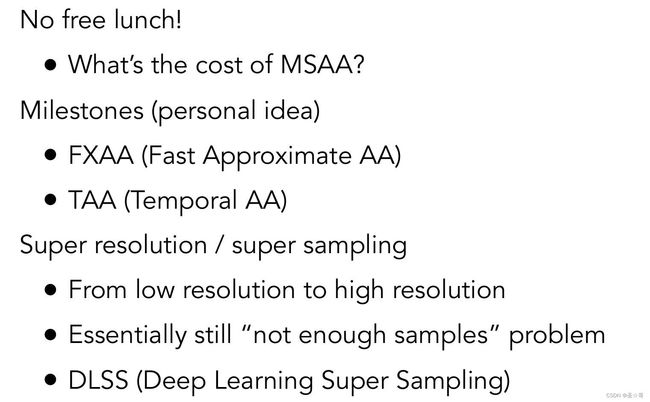
SSAA(Super-Sample Anti-Aliasing),即超级采样抗锯齿,原理是在一个像素格内再细分多个采样点(2x2),判断这些采样点是否位于三角形中,然后将它们的值进行加和平均,这里相当于提高了采样率。MSAA(Multi-Sample Anti-Aliasing),即多重采样抗锯齿,与SSAA有所区别,性能有所优化,但也带来了一些问题。
一位博主对SSAA和MSAA总结得很不错,点此查看。
另外,FXAA和TAA有时间了解一下,还有DLSS,这些在商业中均有应用。
Visibility / Occlusion
Painter’s Algorithm vs. Z-Buffer
Painter’s Algorithm,即按照z深度从远到近对各三角形进行排序(由于深度是负的,故按z值从小到大排序),然后从远到近的顺序对绘制三角形(overwrite),但是这样可能存在unsolvable case:即多个三角形可能“盘”在一块,如下图示:
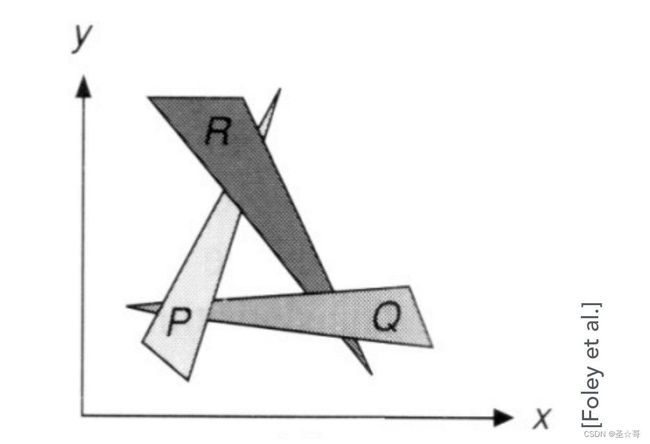
这样,画家算法就失效了。实际上,我们的最终目标并不是确定各三角形的先后顺序,而是确定每一个像素最终绘制什么。
Z-Buffer算法正是从每个像素来考虑,记录每一个像素当前最近的深度——因为每一格像素绘制的一定是深度最近的像素,不论它来自哪一个三角形。
算法伪代码:

复杂度: O ( n ) O(n) O(n), n n n为三角形个数。
对算法的说明:
-
z这里相当于取了绝对值,即全为正;
-
实际上操作的单元不一定是像素,可能是像素内的采样点。
局限(or 疑惑):
-
对于同一位置深度相同的三角形像素,Z-Buffer没有给出处理方案,本课程没有讨论该情况的解决办法;
-
Z-Buffer处理不了透明物体;
-
对于一个像素格,可能存在多个深度不同的三角形出现在该像素格中,这种情况如何处理,是只绘制深度最近的三角形像素吗?(若有知道的大佬,可以在评论区留言)
笔者水平有限,若总结存有不妥之处,恳请各位大佬们批评指正~