SLAM从入门到精通(矩阵的使用)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
学习SLAM,离开了矩阵肯定是玩不转的。大学数学里面除了微积分,剩下的就是线性代数和概率论。而矩阵就是线性代数的一部分。到了研究生,高等数学不学了,但是会继续学习矩阵论和随机数学。它们是线性代数和概率论的衍生。很多同学可能会说,学习矩阵有什么用?主要还是为了解决问题,方便描述。
1、一个二元一次方程
所谓的二元一次方程,写成公式就是这样的形式,这里假设num是一个常数。
![]()
看上去一切还算正常。学过几何的同学都知道这是一条直线,那么假设我们知道了两组(x,y),是不是就可以画出这个直线了,
![]()
这是一个简单的二元一次方程。简单解一下,可以算出来a=1,b=1。
2、用矩阵怎么描述
虽然是一个简单的二元一次方程,但是也是可以用矩阵来描述的。还是上面这么一个情况,如果用矩阵描述,是这样的,
![]()
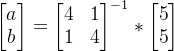
3、用矩阵该怎么解
学过矩阵的同学都知道,按照上面的公式,如果需要求解a和b,那么就要在等式的两边乘以一个逆。这个逆就是矩阵[4 1; 1 4]的逆。所以,a、b的求解是这样的,
4、怎么用计算机来解决矩阵的逆
怎么用计算机来求解逆,这确实是一个问题。不过计算机求解,一般和个人计算是不一样的。计算机的求解大部分是用优化的方法去逼近一个标准答案。而个人如果是完成作业,或者是考试求解逆,则是按照标准的计算流程一步一步去完成。这里,我们可以先安装eigen3-dev的库,
sudo apt-get install libeigen3-dev确认矩阵库已经没有问题之后,这个时候就可以编写代码了,
#include
#include
using Eigen::MatrixXd;
int main()
{
MatrixXd m(2,2);
MatrixXd n(2,1);
m(0,0) = 4;
m(1,0) = 1;
m(0,1) = 1;
m(1,1) = 4;
n(0,0) = 5;
n(1,0) = 5;
MatrixXd param(2,1);
param = m.inverse() * n;
std::cout << param << std::endl;
return 0;
} 代码本身其实没有什么复杂的,m就代表了整个矩阵,是2行*2列。n代表了最终的数值,是2行*1列。而中间的param则代表了中间的参数,也是2行*1列。整个计算过程,最重要的一句话就是param = m.inverse() * n,m.inverse代表先求解矩阵的逆,然后再和n进行相乘。相乘的结果就是param,其中a=param(0,0),b=param(1,0)。
$ ./eigen
1
1
在这计算过程中,对于行和列,一定要分清楚,弄不好,你就看到这样的打印,
$ ./eigen
eigen: /usr/include/eigen3/Eigen/src/Core/Product.h:95: Eigen::Product::Product(const Lhs&, const Rhs&) [with _Lhs = Eigen::Inverse >; _Rhs = Eigen::Matrix; int Option = 0; Eigen::Product::Lhs = Eigen::Inverse >; Eigen::Product::Rhs = Eigen::Matrix]: Assertion `lhs.cols() == rhs.rows() && "invalid matrix product" && "if you wanted a coeff-wise or a dot product use the respective explicit functions"' failed.
看到这种输出,不要怀疑,直接就是行和列搞反了。
5、SLAM中使用矩阵最终的目的
关于矩阵,大部分SLAM处理的时候都可以看到这样的方程,即
watch_data * pose = real_data
min(sigma(ground_truth - real_data))这里的watch_data是一个矩阵,pose是最终目标,可以认为是局部空间里面找一个最佳结果。而real_data,则是该矩阵的计算结果。此外,对于每个watch_data,它的ground_truth数值,我们都是知道的,所以这里的计算目标就变成求解一个pose,使得它的real_data和ground_truth之间的累计和最小。这就是SLAM pose求解的意义。