用Zybo调试CY7C68013A核心板的Slave FIFO模式
用Zybo调试CY7C68013A核心板
- 简介
- CY7C68013A核心板
- CY7C68013程序设计
-
- 硬件连接
- 主要代码
- Zybo程序设计
- 心得
简介
最近在调试CY7C68013A核心板的Slave FIFO模式时,因为电路板的丝印bug,绕了一大圈。最终不但调试成功,也发现了用Zybo调试其它电路板的便利之处。在这里分享下调试过程和心得。
CY7C68013A核心板
淘宝购买的最便宜的核心板,有两个用户LED,硬件版本为HW-274。实物如下图:

根据原理图和实物细节照片,发现丝印SLWR和SLRD搞反了。也即丝印RDY0实际上是RDY1引脚,丝印RDY1实际上是RDY0引脚。具体如下图所示:

红圈处的引脚实际为RDY1/SLWR,但是丝印错误,搞成了RDY0。
蓝圈处的引脚实际为RDY0/SLRD。
最开始是用STM32作为主控,读写CY7C68013的FIFO。但是因为开始没有发现这个错误,就转而使用Zybo调试了。用Zybo的原因是因为它在调试时能够很方便地使用ILA IP进行逻辑分析。正因为这个错误让我认识到了Zybo的额外利用价值。
CY7C68013程序设计
硬件连接
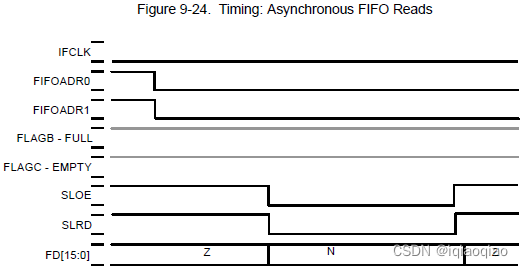
在调试CY7C68013的Slave FIFO模式时,为了简化硬件电路连接和控制端代码,采用了异步模式。根据EZ-USB的TRM文档,异步Slave FIFO读写硬件电路和时序为:



主要代码
CYPRESS提供了FX2LP的固件框架,使得固件开发只需修改TD_Init和TD_Poll(如果采用中断,那就修改中断函数)两个函数即可。针对CY7C68013 的固件程序,只需要修改bulkloop项目中的bulkloop.c文件里的TD_Init和TD_Poll函数。

void TD_Init(void) // Called once at startup
{
//设置8051的工作频率为48MHz
CPUCS = 0x12; // CLKSPD[1:0]=10, for 48MHz operation, output CLKOUT
SYNCDELAY;
//Slave使用内部48MHz的时钟
IFCONFIG = 0xEB; //Internal clock, 48 MHz, output IFCLK, Slave FIFO ASYNC mode
//IFCONFIG.3=ASYNC, 1=async, 0=sync
SYNCDELAY;
//配置FIFO标志输出,FLAG B配置为EP6 IN FIFO空标志
PINFLAGSAB = 0xE0; // FLAGB - EP6FF
SYNCDELAY;
//配置FIFO标志输出,FLAG C配置为EP2 OUT FIFO满标志
PINFLAGSCD = 0x08; // FLAGC - EP2EF
SYNCDELAY;
//PA7=FLAGD
PORTACFG = 0x00;
SYNCDELAY;
FIFOPINPOLAR = 0x00; // set all slave FIFO interface pins as active low
SYNCDELAY;
//将EP2断端点配置为BULK-OUT端点,使用4倍缓冲,512字节FIFO
EP2CFG = 0xA0; //out 512 bytes, 4x, bulk
SYNCDELAY;
//将EP6配置为BULK-OUT端点,
EP6CFG = 0xE0; // in 512 bytes, 4x, bulk
SYNCDELAY;
EP4CFG = 0x02; //clear valid bit
SYNCDELAY;
EP8CFG = 0x02; //clear valid bit
SYNCDELAY;
//复位FIFO
FIFORESET = 0x80; // activate NAK-ALL to avoid race conditions
SYNCDELAY; // see TRM section 15.14
FIFORESET = 0x02; // reset, FIFO 2
SYNCDELAY; //
FIFORESET = 0x04; // reset, FIFO 4
SYNCDELAY; //
FIFORESET = 0x06; // reset, FIFO 6
SYNCDELAY; //
FIFORESET = 0x08; // reset, FIFO 8
SYNCDELAY; //
FIFORESET = 0x00; // deactivate NAK-ALL
SYNCDELAY;
// handle the case where we were already in AUTO mode...
// ...for example: back to back firmware downloads... //
EP2FIFOCFG = 0x00; // AUTOOUT=0, WORDWIDE=0
// core needs to see AUTOOUT=0 to AUTOOUT=1 switch to arm endp's
SYNCDELAY; //
EP2FIFOCFG = 0x11; // AUTOOUT=1, WORDWIDE=1
SYNCDELAY; //
EP6FIFOCFG = 0x0D; // AUTOIN=1, ZEROLENIN=1, WORDWIDE=1
SYNCDELAY;
}
void TD_Poll( void )
{ // Called repeatedly while the device is idle
// ...nothing to do... slave fifo's are in AUTO mode...
}
Zybo程序设计
Zybo的BD设计如下:
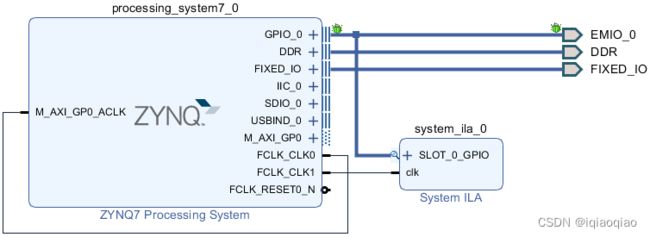
EMIO为24位,ILA的深度为16K,FCLK_CLK1的频率为10MHz。生成bit文件后导出到SDK,SDK的Application中,添加如下main.c文件:
// main.c
#include "xgpiops.h"
#include "sleep.h"
#define ADDR1 54
#define ADDR0 55
#define SLOE 56
#define FLAGC 57
#define FLAGB 58
#define SLWR 59
#define SLRD 60
int main()
{
static XGpioPs psGpioInstancePtr;
XGpioPs_Config* GpioConfigPtr;
int xStatus;
//-- Init. EMIO
GpioConfigPtr = XGpioPs_LookupConfig(XPAR_PS7_GPIO_0_DEVICE_ID);
if(GpioConfigPtr == NULL)
return XST_FAILURE;
xStatus = XGpioPs_CfgInitialize(&psGpioInstancePtr,GpioConfigPtr, GpioConfigPtr->BaseAddr);
if(XST_SUCCESS != xStatus)
print(" PS GPIO INIT FAILED \n\r");
//--config EMIO as output/input
XGpioPs_SetDirectionPin(&psGpioInstancePtr, 62 ,0); //
XGpioPs_SetDirectionPin(&psGpioInstancePtr, 63 ,0); //
XGpioPs_SetDirectionPin(&psGpioInstancePtr, 64 ,0); //
XGpioPs_SetDirectionPin(&psGpioInstancePtr, 65 ,0); //
XGpioPs_SetDirectionPin(&psGpioInstancePtr, ADDR0 ,1); // ADDR0
XGpioPs_SetDirectionPin(&psGpioInstancePtr, ADDR1 ,1); // ADDR1
XGpioPs_SetDirectionPin(&psGpioInstancePtr, SLOE ,1); // SLOE
XGpioPs_SetDirectionPin(&psGpioInstancePtr, SLWR ,1); // SLWR
XGpioPs_SetDirectionPin(&psGpioInstancePtr, FLAGB ,0); // FLAGB
XGpioPs_SetDirectionPin(&psGpioInstancePtr, FLAGC ,0); // FLAGC
XGpioPs_SetDirectionPin(&psGpioInstancePtr, SLRD ,1); // SLRD
//enable EMIO output
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, ADDR1,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, ADDR0,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, SLOE ,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, SLWR ,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, SLRD ,1);
// XGpioPs_WritePin(&psGpioInstancePtr, ADDR1, 0);
// XGpioPs_WritePin(&psGpioInstancePtr, ADDR0, 0);
// XGpioPs_WritePin(&psGpioInstancePtr, SLOE, 0);
//
XGpioPs_WritePin(&psGpioInstancePtr, ADDR1, 1);
XGpioPs_WritePin(&psGpioInstancePtr, ADDR0, 0);
XGpioPs_WritePin(&psGpioInstancePtr, SLOE, 1);
while(1)
{
// if(XGpioPs_ReadPin(&psGpioInstancePtr, FLAGC)) // Not Empty
// {
// XGpioPs_WritePin(&psGpioInstancePtr, SLRD, 0);
// usleep(1);
// XGpioPs_WritePin(&psGpioInstancePtr, SLRD, 1);
// usleep(1);
// }
// else
// {
// XGpioPs_WritePin(&psGpioInstancePtr, SLRD, 1);
// }
if(XGpioPs_ReadPin(&psGpioInstancePtr, FLAGB)) // Not Full
{
XGpioPs_WritePin(&psGpioInstancePtr, SLWR, 0);
usleep(1);
XGpioPs_WritePin(&psGpioInstancePtr, SLWR, 1);
usleep(1);
}
else
{
XGpioPs_WritePin(&psGpioInstancePtr, SLWR, 1);
}
}
return 0;
}
在CY7C68013下载完程序后,启动Zybo,SDK进入Debug模式。在Vivado界面,点击左侧的PROGRAM AND DEBUG。因为ILA的时钟频率为10MHz,那么JTAG频率必须低于4MHz,否则会出错。

右键点击Refresh Server重置JTAG连接,然后设置JTAG频率,如下图设置为3MHz。

或者在Tcl中运行:
refresh_hw_server {localhost:3121}
set_property PARAM.FREQUENCY 3000000 [get_hw_targets localhost:3121/xilinx_tcf/Digilent/210279572355A]
在测试Zybo读CY7C68013的Slave FIFO时,hw_ila_1的设置和捕获的波形如下图

其中,0~6的引脚分别连接CY7C68013的ADDR0、ADDR1、SLOE、SLWR、FLAGB、FLAGC和SLRD。
心得
- 使用了两块电路板才调试CY7C68013成功,最后才发现是丝印的问题,这告诉我 有时候还真不是自己的错 。
- Zybo的PS+PL用起来方便,不论什么时序,PS和PL,总有一款适合你 。