Linux:详解多线程(线程池、读写锁和CAS无锁编程)(四)
文章目录
- 1. 线程池
-
- 1.1 相关概念
- 1.2 线程池的实现
- 2. 读写锁
-
- 2.1 读写锁的相关概念
- 2.2 读写锁的接口
- 3. CAS无锁编程
1. 线程池
1.1 相关概念
概念:
一种线程使用模式。线程过多会带来调度开销,进而影响缓存局部性和整体性能。而线程池维护着多个线程,等待着监督管理者分配可并发执行的任务。这避免了在处理短时间任务时创建与销毁线程的代价。线程池不仅能够保证内核的充分利用,还能防止过分调度。可用线程数量应该取决于可用的并发处理器、处理器内核、内存、网络sockets等的数量。
线程池它本质上是包含了一个线程安全的队列和一大堆的线程
线程池当中的线程都是从线程池当中的线程安全队列中获取元素进行处理,在逻辑上属于消费者线程,线程当中的线程执行的是同样的入口函数,并且执行的是同样的代码。

应用场景:
- 需要大量的线程来完成任务,且完成任务的时间比较短。 WEB服务器完成网页请求这样的任务,使用线程池技术是非常合适的。因为单个任务小,而任务数量巨大,你可以想象一个热门网站的点击次数。 但对于长时间的任务,比如一个Telnet连接请求,线程池的优点就不明显了。因为Telnet会话时间比线程的创建时间大多了。
- 对性能要求苛刻的应用,比如要求服务器迅速响应客户请求。
- 接受突发性的大量请求,但不至于使服务器因此产生大量线程的应用。突发性大量客户请求,在没有线程池情况下,将产生大量线程,虽然理论上大部分操作系统线程数目最大值不是问题,短时间内产生大量线程可能使内存到达极限,出现错误。
1.2 线程池的实现
我们都知道一个服务端后台的代码执行的业务是非常之庞大的,如果一个线程池只能处理一个类型的数据,则需要对每一个业务数据都创建一个线程池,这无疑是消耗巨大的一件事情。那么问题来了:怎么让一个线程池,可以处理多种多样的问题?
首先,我们需要实现一个线程安全的队列。实现线程安全,我们可以采用互斥锁+条件变量来实现,也可以采用信号量来实现。
其次,为了让该线程安全队列中的线程在出队的时候可以处理多种多样的问题,我们必须规定该队列的元素类型为① 待要处理的数据、② 处理该数据的方法。
并且由于线程池中的线程都是从线程安全队列中获取元素进行处理的,因此当我们往队列中插入我们所规定的元素类型时(即Push方法),就相当于一个生产者线程。
然后当线程池中的多个线程都被创建出来时,都会从队列中获取元素并处理(即Pop方法),就相当于一个消费者线程。因此,线程池的实现逻辑也和生产者和消费者的逻辑类似。
总结一下,要实现一个线程池,我们需要:
① 定义队列的元素类型,该类型包括数据的类型(本题中我们使用int,但实际业务中就可能是一些自定义类型的数据)和处理数据的方法(函数指针),该方法就是一个函数,因此我们只需要将其对应的函数指针传入即可。
② 用一个类来表示线程池,该类中的成员变量主要有:
- 用一个队列来存储我们之前定义的元素类型。
- 为了实现队列的线程安全,我们采用条件变量+互斥锁来实现,使用一个互斥锁来保证在操作队列时不同线程之间是互斥的,使用两个条件变量来保证生产者和消费者之间的同步。
- 线程池的容量大小限制
- 由于线程池在启动线程的时候,可能会有一部分线程启动失败,因此我们需要一个变 量来记录启动成功的线程数量
- 当线程池中的线程处理完自己所需要处理的函数的时候,就要进行线程退出,但是> 由于线程池中有众多的线程,每个线程之间是并行执行的,因此当我们整个线程池要退出> 的时候,就需要将某些还阻塞在PCB等待队列中的线程全部唤醒,因此就需要一个标志变量> 来标志,让当前还在运行的线程进行退出。
成员方法主要有:
- 首先是构造函数,在这个里面初始化各个成员变量
- 析构函数,该函数中析构创建出的成员变量
- 线程创建函数,该函数用来创建出线程池中的线程并将其初始化
- 线程启动函数,该函数用来使线程池中的线程从线程安全队列中获取元素并处理(消费者线程)
- Pop函数,弹出队列中的元素
- Push函数,在主线程中用来向线程池中线程安全队列插入对应的要处理的数据(生产者线程)
- 线程退出函数,该函数用来将目前所有处于PCB等待队列的线程全部唤醒(防止在析构线程池的时候,还有线程处于PCB等待队列中未进行退出,而浪费程序的资源)。
实现代码如下:
#include 运行结果:
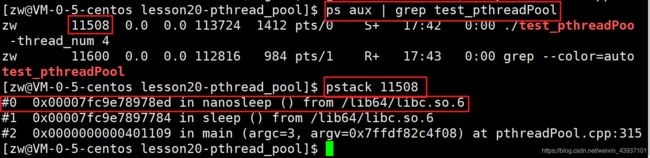
查看结果发现并没有出现什么问题,我们再来看一下它的调用堆栈信息
这个时候我们可以发现线程池中的4个线程全部终止掉了,说明程序是没有问题的!!!
2. 读写锁
2.1 读写锁的相关概念
首先我们要知道读写锁所适用的场景是:存在大量读,少量写的情况下,使用读写锁。
读写锁所实现的就是多个程序可以并行的对临界资源进行读操作,并且程序是不会产生二义性的结果。
读写锁有三种模式:读模式、写模式、不加锁。
① 以读模式打开读写锁
以读模式打开的话,则多个线程可以并行的对临界资源进行操作,是不需要实现互斥的,因为读写锁的内部有一个引用计数,来统计当前以读模式打开读写锁的线程数量,通过引用计数来判断当前是否还有线程以读模式打开读写锁,本质上是想判断读写锁什么时候是空闲的,没有被占用的。
② 以写模式打开读写锁
以写模式打开的话,就相当于是互斥锁。
面试题:
现在有四个线程,线程A、B、C、D,其中线程A和B是以读模式打开的此锁,并且已经拥有了读写锁,现在线程C想要以写模式打开读写锁,由于读写锁已经被别的线程拿走了,所以线程C进入阻塞状态,那么此时又来了一个线程D,线程D想以读模式拿到这把互斥锁,问:线程D可以拿到吗?
解答:
这个问题从理论上来讲线程D是可以拿到读写锁的,,但是从实际上来说是不可以拿到的,试想一下,如果可以拿到,那么后面来的所有线程都是以读模式拿到读写锁,那么此时被阻塞的线程C什么时候才能运行,肯定要等其他以读模式打开的线程都运行完之后才能拿到,这在实际情况中是根本不允许的,因此,一旦有以写模式打开读写锁的线程出现,后面来的所有以读模式访问读写锁的线程均会被阻塞掉。
2.2 读写锁的接口
由于读写锁的接口中的类型和互斥锁一样,这里就不再做详细的解释。
读写锁的类型:pthread_rwlock_t
①创建读写锁
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock,\
const pthread_rwlockattr_t *restrict attr);
②销毁读写锁
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
③加锁接口
以读模式打开
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
以写模式打开
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
④解锁接口
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
3. CAS无锁编程
无锁 CAS(Compare and swap,比较和交换)是一种乐观的并发控制策略,它假设对资源的访问是没有冲突的,遇到冲突进行重试操作直到没有冲突为止。这种设计思路和数据库的乐观锁很相像。在硬件层面,大部分的处理器都支持原子化的 CAS 指令。也就是说比较和交换这个操作是有处理器来保证是原子操作的。
悲观锁和乐观锁
实际上乐观锁和悲观锁是基于线程并发竞争的角度来说的,悲观锁就是假设每次操作都悲观的认为会发生线程竞争,不加锁就会导致程序结果错误;乐观锁就假设每次操作都乐观的认为不会发生线程竞争,所以不需要上锁,因此CAS被称为无锁编程,实际上是一种乐观锁的体现。
简单来说,CAS 需要你额外给出一个期望值,也就是你认为这个变量现在是什么样子的。如果不是你想象的那样,则说明它已经被别人修改过了。你就重新读取,再次尝试修改就好了。
优势:无锁更优的性能,没有死锁风险。
缺点:它将使调用者处理竞争问题(重试、回退、放弃),而在锁中能自动处理竞争问题(线程在获得锁之前将一直阻塞)。
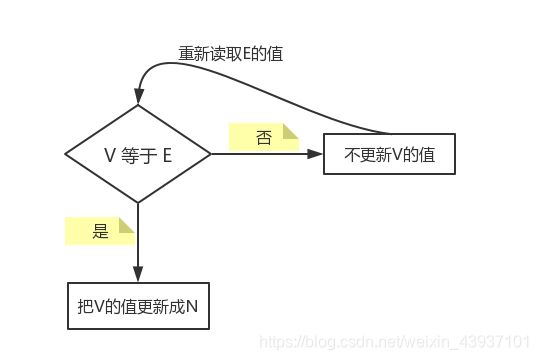
无锁编程的实现原理是
- 线程A从主内存中读入变量count作为值V;
- 线程A读取count的最新值,作为期望值E
- 线程A把值(V)和期望(E)比较是否相等,相等就把新值(N)写回主内存,不相等就回到操作1
本小节CAS无锁编程的相关概念转载至无锁编程CAS和并发编程-无锁CAS之原子变量这两位大佬写的博客,更为详细的可以去看看这两篇文章。
2021/8/20——CAS无锁编程补充
我们通常所用的互斥锁,它其实就是一种悲观的锁,什么是悲观呢?就是操作系统悲观的认为如果不按照严格按照同步线程的调用,那么这个系统就一定会发生异常。
事实上这种锁的使用所带来的系统消耗也是极大的,当某个线程拿到该锁的时候,其余线程均会循环的进行抢锁,陷入等待锁的逻辑中,这对于一些大型项目来说,无疑就是一个比较致命的问题,并且如果只使用一个互斥锁保证线程安全,也可能会导致资源不合理分配的问题,举个例子来说的话就是全局变量g的值为1000,线程A、B、C要同时对这个全局变量g进行减减操作,假设当A拿到了互斥(悲观)锁,那么极有可能造成的结果是只有线程A进行减减,线程B和C到程序结束之前,并没有获得锁,或者获取到锁之后,只进行了很少的减减操作,这就造成了资源的不合理性分配。
而我们想要的结果是线程A、B、C并发的对全局变量g进行操作。
那么该如何优化呢?于是就有了读写锁和CAS无锁编程。
CAS无锁编程,是一种“乐观”锁,那么何为乐观呢?就是当线程想要去修改临界区资源的时候,都会乐观的认为,对象的值没有被其他线程修改过,而是需要自己去每次去比较和更新状态值。