Linux驱动开发
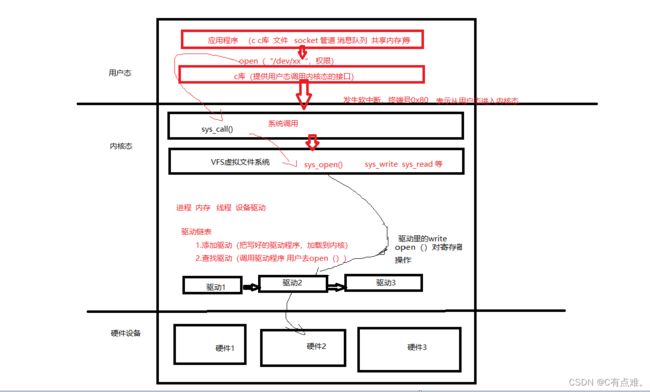
1.Linux如何找到设备文件
通过 文件名和设备号
设备号 : 主设备号和次设备号
主设备号区分不同种类的设备
次设备号区分同一类型不同的设备
Linux的驱动链表会管理这些设备驱动
1.添加(编写完驱动程序加载到内核)
2.查找 (调用驱动程序,用户层去调用open)
驱动插入链表的顺序由设备号检索
2.驱动开发
驱动的开发就是 添加驱动和调用驱动
添加驱动: 设备名 设别号 驱动函数(操作寄存器驱动IO口)
用户态open()会进入内核态 此时会发生软中断 中断号0x80
3.驱动框架代码
#include 4.驱动测试
(1)把驱动文件放到上位机的driver/目录下
(2)修改Makefile 把其编译为模块
把 obj-m += xxx. o 加入到makefile中
(3)编译成模块
ARCH=arm CROSS_COMPILE=交叉编译工具 KERNEL=内核版本 make modules
(4) 装载驱动到驱动链表
sudo insmod xxx.ko
( 5)装载驱动会自动生成设备 比如 /dev/pin4,通过chmod 666 /dev/pin4 给其执行权限
(6)运行测试程序调用驱动
内核驱动装载: sudo insmod xxx.ko
内核驱动卸载 :sudo rmmod xxx 不用写ko
查看内核模块:lsmod
内核的printk相当于用户态的printf 通过dmesg查看内核打印信息
5,地址
1.总线地址
总线地址就是cpu可以访问内存的地址范围
装了32位系统的计算机最大可以访问2 ^32bit
Linux可以通过cat /proc/meminfo
2.物理地址
硬件的实际地址或绝对地址就是硬件的物理地址
3.虚拟地址
虚拟地址就是逻辑地址,是基于算法的地址,软件层面的地址。
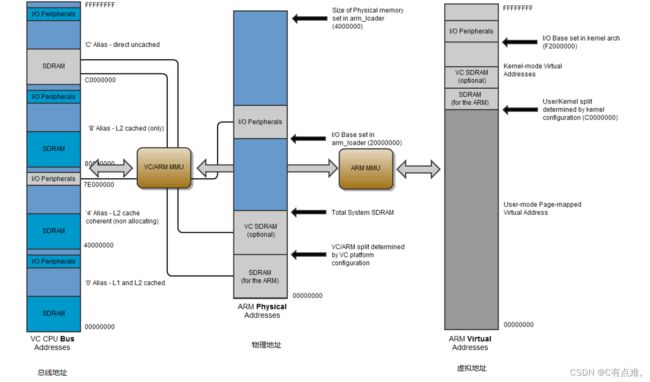
当物理地址不够用时,会通过MMU单元映射为虚拟地址,通过虚拟地址来保证程序的运行。上层应用操作的地址都是虚拟地址。
页表是内存非连续分区分配的基础,实现从逻辑地址转化成物理地址。页表是mmu管理的
6.树莓派驱动开发
//pin4_driver2.c
#include 7.用户态测试代码
//test.c
#include 8.编译
1.把驱动代码拷贝到/driver/char目录下
2.修改Makefile
3.回到源码目录/linux-rpi-4.14.y再执行下面指令编译为模块 生成xxx.ko
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make modules
4.把生成的模块拷贝到开发板 scp指令
5.交叉编译测试代码
arm-linux-gnueabihf-gcc test.c -o pin4test
6.把test发送到开发板 scp指令
9.装载驱动模块
1.sudo insmod pin4_drive2.ko装载驱动
如果要卸载的话就用 sudo rmmod指令
2.sudo chmod 666 /dev/pin4 给所有用户执行权限
3.运行 ./pin4test