go基础08-map的内部实现
和切片相比,map类型的内部实现要复杂得多。Go运行时使用一张哈希表来实现抽象的map类型。运行时实现了map操作的所有功能,包括查找、插入、删除、遍历等。在编译阶段,Go编译器会将语法层面的map操作重写成运行时对应的函数调用。
下面是大致的对应关系:
// $GOROOT/src/cmd/compile/internal/gc/walk.go
// $GOROOT/src/runtime/map.go
m := make(map[keyType]valType, capacityhint) → m := runtime.makemap(maptype, capacityhint, m)
v := m["key"] → v := runtime.mapaccess1(maptype, m, "key")
v, ok := m["key"] → v, ok := runtime.mapaccess2(maptype, m, "key")
m["key"] = "value" → v := runtime.mapassign(maptype, m, "key") // v是用于后续存储value 的空间的地址
delete(m, "key") → runtime.mapdelete(maptype, m, "key")
下图是map类型在运行时层实现的示意图。

1. 初始状态
从图上中我们可以看到,与语法层面map类型变量一一对应的是runtime.hmap类型的实例。hmap是map类型的header,可以理解为map类型的描述符,它存储了后续map类型操作所需的所有信息。
● count:当前map中的元素个数;对map类型变量运用len内置函数时,len函数返回的就是count这个值。
● flags:当前map所处的状态标志,目前定义了4个状态值——iterator、oldIterator、hashWriting和sameSizeGrow。
● B:B的值是bucket数量的以2为底的对数,即2^B = bucket数量。
● noverflow:overflow bucket的大约数量。
● hash0:哈希函数的种子值。
● buckets:指向bucket数组的指针。
● oldbuckets:在map扩容阶段指向前一个bucket数组的指针。
● nevacuate:在map扩容阶段充当扩容进度计数器。所有下标号小于nevacuate的bucket都已经完成了数据排空和迁移操作。
● extra:可选字段。如果有overflow bucket存在,且key、value都因不包含指针而被内联(inline)的情况下,该字段将存储所有指向overflow bucket的指针,保证overflow bucket是始终可用的(不被垃圾回收掉)。
真正用来存储键值对数据的是bucket(桶),每个bucket中存储的是Hash值低bit位数值相同的元素,默认的元素个数为BUCKETSIZ(值为8,在$GOROOT/src/cmd/compile/internal/gc/reflect.go中定义,与runtime/map.go中常量bucketCnt保持一致)。
当某个bucket(比如buckets[0])的8个空槽(slot)都已填满且map尚未达到扩容条件时,运行时会建立overflow bucket,并将该overflow bucket挂在上面bucket(如buckets[0])末尾的overflow指针上,这样两个bucket形成了一个链表结构,该结构的存在将持续到下一次map扩容。
每个bucket由三部分组成:tophash区域、key存储区域和value存储区域。
1)tophash区域
当向map插入一条数据或从map按key查询数据的时候,运行时会使用哈希函数对key做哈希运算并获得一个哈希值hashcode。这个hashcode非常关键,运行时将hashcode“一分为二”地看待,其中低位区的值用于选定bucket,高位区的值用于在某个bucket中确定key的位置。这个过程可参考下图。
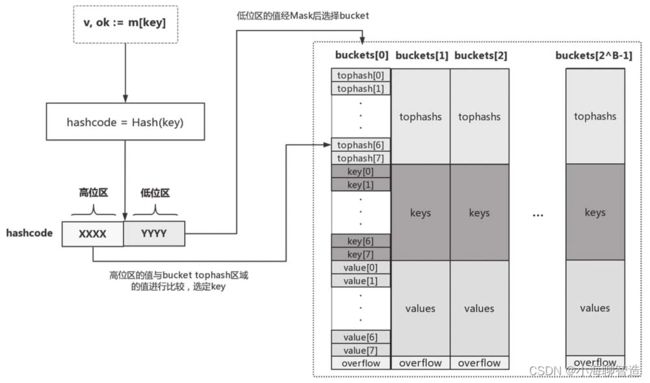
因此,每个bucket的tophash区域是用于快速定位key位置的,这样避免了逐个key进行比较这种代价较大的操作,尤其是当key是size较大的字符串类型时,这是一种以空间换时间的思路。
2)key存储区域
tophash区域下面是一块连续的内存区域,存储的是该bucket承载的所有key数据。
运行时在分配bucket时需要知道key的大小。那么运行时是如何知道key的大小的呢?当我们声明一个map类型变量时,比如var m map[string]int,Go运行时就会为该变量对应的特定map类型生成一个runtime.maptype实例(如存在,则复用):
// $GOROOT/src/runtime/type.go
type maptype struct {
typ _type
key *_type
elem *_type
bucket *_type // 表示hash bucket的内部类型
keysize uint8 // key的大小
elemsize uint8 // elem的大小
bucketsize uint16 // bucket的大小
flags uint32
}
该实例包含了我们所需的map类型的所有元信息。前面提到过编译器会将语法层面的map操作重写成运行时对应的函数调用,这些运行时函数有一个共同的特点:
第一个参数都是maptype指针类型的参数。Go运行时就是利用maptype参数中的信息确定key的类型和大小的,map所用的hash函数也存放在maptype.key.alg.hash(key, hmap.hash0)中。
同时maptype的存在也让Go中所有map类型共享一套运行时map操作函数,而无须像C++那样为每种map类型创建一套map操作函数,从而减少了对最终二进制文件空间的占用。
运行该程序:
$go run map_concurrent_read_and_write.go
fatal error: concurrent map iteration and map write
我们会得到上述panic信息。如果仅仅是并发读,则map是没有问题的。
Go 1.9版本中引入了支持并发写安全的sync.Map类型,可以用来在并发读写的场景下替换掉map。另外考虑到map可以自动扩容,map中数据元素的value位置可能在这一过程中发生变化,因此Go不允许获取map中value的地址,这个约束是在编译期间就生效的。示例
代码如下:
p := m[key] // 无法获取m[key]的地址
fmt.Println(p)
尽量使用cap参数创建map
从上面的自动扩容原理我们了解到,如果初始创建map时没有创建足够多可以应付map使用场景的bucket,那么随着插入map元素数量的增多,map会频繁扩容,而这一过程将降低map的访问性能。
因此,如果可能的话,我们最好对map使用规模做出粗略的估算,并使
用cap参数对map实例进行初始化。下面是使用cap参数与不使用map参数的map写性能基准测
试及测试结果:
const mapSize = 10000
func BenchmarkMapInitWithoutCap(b *testing.B) {
for n := 0; n < b.N; n++ {
m := make(map[int]int)
for i := 0; i < mapSize; i++ {
m[i] = i
}
}
}
func BenchmarkMapInitWithCap(b *testing.B) {
for n := 0; n < b.N; n++ {
m := make(map[int]int, mapSize)
for i := 0; i < mapSize; i++ {
m[i] = i
}
}
}
可以看出,使用cap参数的map实例的平均写性能是不使用cap参数的2倍。
goos: darwin
goarch: amd64
BenchmarkMapInitWithoutCap-8 2000 645946 ns/op 687188 B/op 276 allocs/op
BenchmarkMapInitWithCap-8 5000 317212 ns/op 322243 B/op 11 allocs/op
PASS
ok command-line-arguments 2.987s
和切片一样,map是Go语言提供的重要数据类型,也是Gopher日常编码中最常使用的类型之一。通过本条的学习我们掌握了map的基本操作和运行时实现原理,并且我们在日常使
用map的场合要把握住下面几个要点:
● 不要依赖map的元素遍历顺序;
● map不是线程安全的,不支持并发写;
● 不要尝试获取map中元素(value)的地址;
● 尽量使用cap参数创建map,以提升map平均访问性能,减少频繁扩容带来的不必要损耗