ubuntu C++调用python
普通
目录结构
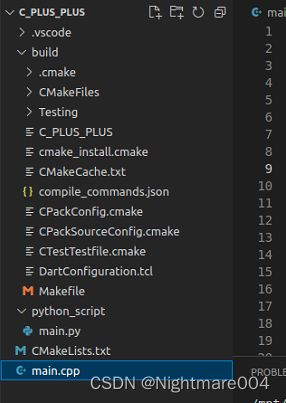
main.py
等会用c++调用func()
#!/usr/bin/env python
# _*_ coding:utf-8 _*_
import os
def func():
print('hello world')
if __name__ == '__main__':
func()
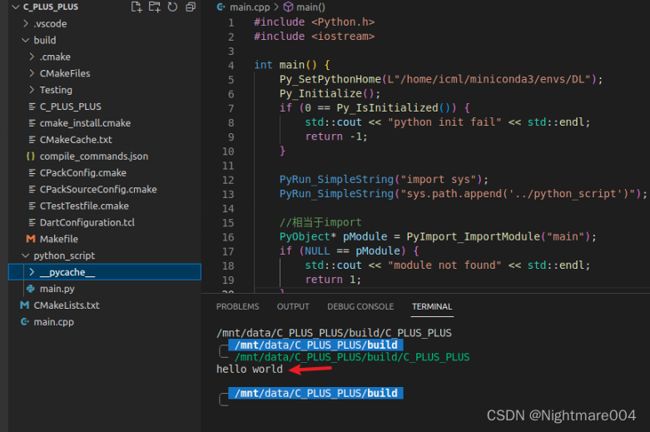
main.cpp
其中Py_SetPythonHome的路径是anaconda中环境的路径,最开始的L一定要加(因为代表wchar_t)
sys.path.append是用来找你的python文件路径的,其中 " . " "." "."表示可执行文件的路径
#include CMakeLists.txt
稍微对照着修改一下就行
cmake_minimum_required(VERSION 3.0.0)
project(C_PLUS_PLUS VERSION 0.1.0)
# IF(NOT CMAKE_BUILD_TYPE)
# SET(CMAKE_BUILD_TYPE Release)
# ENDIF()
set(PYTHON_INCLUDE_DIRS "/home/icml/miniconda3/envs/DL/include/python3.8")
INCLUDE_DIRECTORIES(${PYTHON_INCLUDE_DIRS})
link_directories("/home/icml/miniconda3/envs/DL/lib/python3.8/config-3.8-x86_64-linux-gnu")
set(PYTHON_LIBRARIES "/home/icml/miniconda3/envs/DL/lib/libpython3.8.so")
add_executable(${PROJECT_NAME} main.cpp)
target_link_libraries(${PROJECT_NAME} ${PYTHON_LIBRARIES})
我这里cmake最后产生到build目录里
opencv+numpy+pytorch
main.cpp
load_model
加载模型
get_predict_xy
用C++的opencv读图片,转numpy传入python
python再用pytorch预测,返回一个numpy
simple_test
用C++的opencv读图片,转numpy传入python
python直接传回来给C++,转opencv
顺带提一下,import_array()一定要写
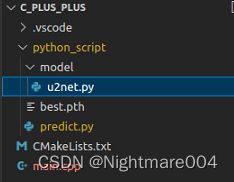
#include predict.py
UNet我没放出来
#!/usr/bin/env python
# _*_ coding:utf-8 _*_
import os
import numpy as np
from model.u2net import UNet
import torch
from cv2 import cv2
import imgaug.augmenters as iaa
model = UNet(in_channels=1, out_channels=19)
device = torch.device('cuda:0')
augmentation = iaa.Sequential([
iaa.Resize({"width": 416, "height": 512})
])
def init_model(path):
global model, device
if not os.path.exists(path):
print(f'not found {os.path.abspath(path)}')
return -1
model_state_dict = torch.load(path)
model.load_state_dict(model_state_dict)
model = model.to(device)
return 0
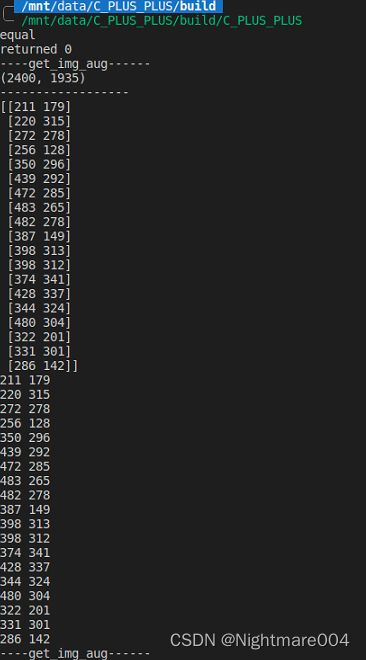
def get_img_aug(img):
global augmentation
print('----get_img_aug------')
print(img.shape)
print('------------------')
# img = cv2.imread(path, 0) # 2490*1935
img_aug = augmentation(image=img)
img_aug = (img_aug - img_aug.min()) / (img_aug.max() - img_aug.min())
img_aug = torch.FloatTensor(img_aug).unsqueeze(0).unsqueeze(0) # torch.Size([1, 1, 512, 416])
return img_aug
def get_heatmap_coordination_batch_numpy(heatmap):
"""
get heatmap coordination by batch
:param heatmap: (B,C,H,W) or (B,C,H,W,D) (C is the num of landmark)
:return: coordination (B,C,2) or (B,C,3)
"""
origin_shape = heatmap.shape
heatmap = heatmap.reshape(*origin_shape[:2], -1)
temp = np.argmax(heatmap, axis=-1)[..., np.newaxis]
# unravel_index
out = []
for dim in reversed(origin_shape[2:]):
out.append(temp % dim)
temp = np.floor_divide(temp, dim)
out = np.concatenate(out[::-1], axis=-1)
return out
def get_predict_xy(img):
global model
# if not os.path.exists(path):
# return None
img = get_img_aug(img).to(device)# 1 * 1 * 512 * 416
output = model(img)['output'].to('cpu').detach().numpy() # 1 * 1 * 19 * 2
predict_xy = get_heatmap_coordination_batch_numpy(output).squeeze(0) # 19 * 2
print(predict_xy)
return predict_xy
def simple_test(img):
return img
if __name__ == '__main__':
path = '/mnt/data/datasets/landmark/ISBI2015_ceph/raw/001.bmp'
init_model('best.pth')
print('finish_init')
print(get_predict_xy(path).shape)
print(get_predict_xy(path).dtype)
CMakeLists.txt
cmake_minimum_required(VERSION 3.0.0)
project(C_PLUS_PLUS VERSION 0.1.0)
IF(NOT CMAKE_BUILD_TYPE)
SET(CMAKE_BUILD_TYPE Release)
ENDIF()
set(PYTHON_INCLUDE_DIRS "/home/icml/miniconda3/envs/DL/include/python3.8")
set(NUMPY_INCLUDE_DIR "/home/icml/miniconda3/envs/DL/lib/python3.8/site-packages/numpy/core/include")
INCLUDE_DIRECTORIES(${PYTHON_INCLUDE_DIRS} ${NUMPY_INCLUDE_DIR})
link_directories("/home/icml/miniconda3/envs/DL/lib/python3.8/config-3.8-x86_64-linux-gnu")
set(PYTHON_LIBRARIES "/home/icml/miniconda3/envs/DL/lib/libpython3.8.so")
add_executable(${PROJECT_NAME} main.cpp)
target_link_libraries(${PROJECT_NAME} ${PYTHON_LIBRARIES})
find_package(OpenCV REQUIRED)
message(STATUS "OpenCV library status:")
message(STATUS " config: ${OpenCV_DIR}")
message(STATUS " version: ${OpenCV_VERSION}")
message(STATUS " libraries: ${OpenCV_LIBS}")
message(STATUS " include path: ${OpenCV_INCLUDE_DIRS}")
INCLUDE_DIRECTORIES(${OpenCV_INCLUDE_DIRS})
target_link_libraries(${PROJECT_NAME} ${OpenCV_LIBS})
目录结构
运行