嵌入式裸机设计思想——时间片轮裸机开发架构+状态机+定时器调度机制
前言
(1)如果有嵌入式企业需要招聘校园大使,湖南区域的日常实习,任何区域的暑假Linux驱动实习岗位,可C站直接私聊,或者邮件:[email protected],此消息至2025年1月1日前均有效
(2)在MCU开发的时候,很多入门者会固执的认为,做项目一定要上实时操作系统。但是真的是这样的吗?
(3)我曾经阅读过一位10年嵌入式开发经验的大佬分享的公众号,这位大佬感叹到,其实对于绝大多数时候,MCU开发不需要上操作系统。只要任务分配的合理,百分之九十的项目不上操作系统都是能够跑的。
(4)今天我就分享一下我之前备赛期间所搭建基于TM4C123的工程模板。不过这个模板问题还是有很多,比如模块之间耦合很严重,当时没有这个意识,现在才发现写的有多垃圾。虽说如此,但本人认为还是有优点的地方。
(5)注意:本文需要一点函数指针,结构体,枚举的知识,不了解的同学请先去补充好基础再来看
正文
状态机
(1)状态机其实很好理解,说白了就是一个switch()语句。根据情况将一个任务拆分成多种。例如,在我的代码中,有一个OLED显示程序。因为OLED显示是非常浪费时间的,为了不因为一个这样的程序,而影响到其他任务的执行,我们可以将OLED显示任务分成多个,依次显示。
static void Display(void)
{
static uint8_t gray_display_state=2;
switch(gray_display_state)
{
case 2:gray_display_state++;break;
case 3:gray_display_state++;break;
case 4:gray_display_state++;break;
case 5:gray_display_state++;break;
case 6:gray_display_state++;break;
default:gray_display_state = 2;
}
}
(2)上面那种其实是最简单的形式,整个状态是呈现圆圈型状的状态机。但是,我们有时候会遇到一些情况,他的状态有很多种任务流程,例如洗衣机,有待机状态,运行状态,运行结束之后的自动停止进入待机状态,手动关停状态,因一些异常情况引起的停止状态。因此,状态机也是一个很好的思路。
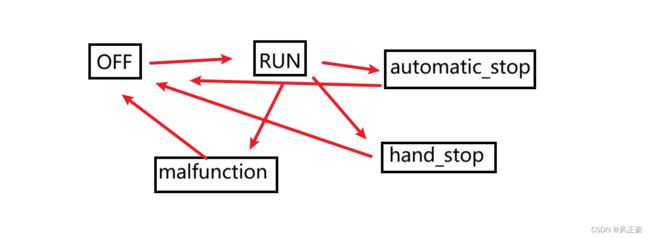
enum Washer_State_List
{
off, //待机状态
run, //运行机状态
automatic_stop, //自动停止
hand_stop, //手动关停状态
malfunction //故障
};
static void washer_control(void)
{
static uint8_t washer_state=2;
switch(washer_state)
{
case off:
LCD_show("stop");
if(operation_key == true) washer_state = run;
break;
case run:
LCD_show("runing");
//如果手动关停
if(hand_stop_key == true) washer_state = hand_stop;
//如果计时结束
if(time-- == over) washer_state = automatic_stop;
//识别到了异常
if(err == true) goto err;
break;
case automatic_stop:
//显示洗衣机已经关闭
LCD_show("Finished washing");
washer_state = off;
break;
case hand_stop:
//关闭洗衣机
washer_stop();
//显示洗衣机已经手动关闭
LCD_show("Manually closed");
washer_state = off;
break;
case malfunction:
err :
//关闭洗衣机
washer_stop();
//报警
alarm_system(on);
//显示机器故障
LCD_show("Machine failure");
washer_state = off;
break;
default:gray_display_state = 2;
}
}
时间片轮裸机开发架构
(1)这个机制名字很多,有些人叫做软定时器,有些叫做Easy51RTOS,具体叫做什么,我们就不深究了。
(2)新手入门MCU裸机开发,肯定都是一股脑的采用while(1)死循环,然后一直跑。如果是开发稍微复杂一点点的任务时候,你就会深刻的感受到,这样写究竟有多垃圾。
(3)一股脑的while(1)死循环,然后里面堆一大堆的任务,这样做有一下几种问题:
<1>在后续的维护中非常复杂。想找到目标任务找起来很费力。
<2>并不是所有的任务都需要频繁执行,例如OLED显示,就是一个非常费时间,但是又没有必要一直保持刷新的任务。他只要能够做到50ms刷新一次就能够做动画了。因此这种任务放在while(1)无脑执行无疑是对CPU的浪费,导致真正需要CPU执行的任务没有有效的照顾。
(4)为了优化上面这些问题,大佬们于是提出了基于时间片的裸机开发架构,我们可以利用一个定时器提供心跳,不断的进行计数。然后当定时时间一到,那么就可以开始执行相应的任务了。
(5)时间片轮转的裸机架构看起来是不是很完美?NO,不是的,他确实比无脑while(1)优秀很多,但是我们需要知道,每个任务的执行时间不能超出一次时间片。(例如我们上面的滴答定时器是2ms定时,所以时间片是2ms)
(6)因此,我们需要大概估计每个任务的执行时间,这里有很两种做法:
<1>利用滴答定时器,当任务开始记录当前时间,任务结束记录当前时间然后两者相减。
<2>进入函数,让某个引脚为高电平,函数结束让他为低电平,然后用示波器捕捉这个引脚的上升沿和下降沿。(这个方法感觉有点麻烦,我是使用的第一个)
(7)时间片轮裸机开发框架机制确实非常好,但是毕竟还是软件实现的任务调度,实时性只能说相对于只有一个while(1)好,对于其他的机制还是不太行。所以我个人还是建议,只有不重要的任务,对整个项目影响不大的任务可以放在这个框架里面,例如OLED显示,按键扫描。
/*------------------------------------------------*/
/*------------------- systick.c ------------------*/
/*------------------------------------------------*/
/* 滴答定时器中断,每2毫秒进入一次,count表示过了多少个2毫秒,最多计时2366多个小时*/
static void SycTickHandler(void) {
counter++;
task_remarks(); //用于任务调度,此任务执行时间在5us之内
}
/*------------------------------------------------*/
/*-------------------- Task.h --------------------*/
/*------------------------------------------------*/
#ifndef _Task__H
#define _Task__H
// 任务结构
typedef struct
{
uint8_t run; // 程序运行标记:0:不运行,1:运行
uint16_t timer; // 定时器,用于自减 单位:ms
uint16_t itv_time; // 任务运行间隔时间 单位:ms
void (*hook)(void); // 要运行的任务函数
} task_params_t;
/***** 函数声明 *******/
void task_proc(void); //任务执行处理
void task_remarks(void); //任务标志位处理
#endif
/*------------------------------------------------*/
/*-------------------- Task.c --------------------*/
/*------------------------------------------------*/
static void SW_Scan(void);
// 任务清单
enum TASK_LIST {
TASK1_SW_Scan, // 任务2,按键扫描
TASK2_Display, // 任务3,OLED显示
TASKS_NUM // 任务总数
};
//任务列表
static task_params_t s_task_params[TASKS_NUM] = {
{0, Task_interval_ms(20), Task_interval_ms(20), SW_Scan }, //任务2
{0, Task_interval_ms(10), Task_interval_ms(10), Display }, //任务3
};
/*
*********************************************************************************************************
* 函 数 名: task_proc
* 功能说明: 任务处理
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void task_proc(void)
{
uint8_t i = 0;
for(i = 0; i < TASKS_NUM; i++)
{
if(s_task_params[i].run)
{
s_task_params[i].run = 0;
s_task_params[i].hook();
s_task_params[i].timer = s_task_params[i].itv_time;
break;
}
}
}
/* 作用 : 任务标志处理,单位是2ms,因为滴答定时器中断设置的是2ms
* 传入参数 : 无
* 返回参数 : 无
* 任务时间 : TASKS_NUM少于10的时候,运行速度在5ns之内
*/
void task_remarks(void)
{
uint8_t i = 0;
for(i = 0; i < TASKS_NUM; i++)
{
if(s_task_params[i].timer)
{
s_task_params[i].timer--;
if(s_task_params[i].timer == 0)
{
s_task_params[i].run = 1;
}
}
}
}
/*****************************************************************************************/
/************************************* 按键扫描任务 *************************************/
/*****************************************************************************************/
static void SW_Scan(void)
{
//...
}
/*****************************************************************************************/
/********************************* 灰度传感器时间显示任务 *******************************/
/*****************************************************************************************/
static void Display(void)
{
static uint8_t gray_display_state=2;
switch(gray_display_state)
{
case 2:
gray_display_state++;
//...
break;
case 3:
gray_display_state++;
//...
break;
case 4:
gray_display_state++;
//...
break;
case 5:
gray_display_state++;
//...
break;
case 6:
gray_display_state++;
//...
break;
default:
gray_display_state = 2;
}
}
定时器调度
(1)如果经验稍微丰富的同学会发现,上面的方法其实还是有问题的。例如有些任务我需要说执行就执行,如果是按照上面的方法来肯定是有一点点迟钝的。
(2)因此,我们可以采用定时器调度机制,例如我们的编码器数值读取和PID运算是优先级最高的任务,他的影响因素非常大,是我们的核心任务,所以他单独分配一个定时器。
(3)然后其他的一些任务,很相对来说,比较重要,但是却又不是核心任务。因此,我们可以将它存放在一个优先级低一级的定时器中。
(4)如果还有剩余的定时器,你可以自己根据需求进行任务分级,然后实现定时器调度功能。
//用于获取编码器的值
systime Time0_Delta;
void TIMER0A_Handler(void)
{
get_systime(&Time0_Delta);
cnt = 1;
left_motor_speed_cmps =get_left_motor_speed(); //获取左边轮子实际速度值
right_motor_speed_cmps=get_right_motor_speed(); //获取右边轮子实际速度值
Motor_Foreward_Right(400);
Motor_Foreward_Left(400);
TimerIntClear(TIMER0_BASE,TIMER_TIMA_TIMEOUT); //清除中断标志位
}
//普通任务
systime Time1_Delta;
void TIMER1A_Handler(void)
{
get_systime(&Time1_Delta);
cnt = 2;
//任务列表
//超声波数据解析
US_100_Statemachine(UART5_BASE);
//MPU6050数据采集
MPU6050_Read_Data(&WP_Sensor.gyro_raw,&WP_Sensor.accel_raw,&WP_Sensor.temperature);
TimerIntClear(TIMER1_BASE,TIMER_TIMA_TIMEOUT); //清除中断标志位
}
总结
(1)如果我们了解了如上机制,对于后续的操作系统学习,以及任务调度的理解会有一定的帮助。
(2)使用如上机制之后,也会很好的管理项目的各种任务,多裸机开发也很有利。