数据结构与算法之美(三)
一,红黑树
平衡二叉树的严格定义是这样的:二叉树中任意一个节点的左右子树的高度相差不能大于 1。最先被发明的平衡二叉查找树是AVL 树,它严格符合我刚讲到的平衡二叉查找树的定义,即任何节点的左右子树高度相差不超过 1,是一种高度平衡的二叉查找树。
但是很多平衡二叉查找树其实并没有严格符合上面的定义(树中任意一个节点的左右子树的高度相差不能大于 1),比如我们下面要讲的红黑树,它从根节点到各个叶子节点的最长路径,有可能会比最短路径大一倍。
(1)如何定义一棵“红黑树”?
红黑树中的节点,一类被标记为黑色,一类被标记为红色。除此之外,一棵红黑树还需要满足这样几个要求:
- 根节点是黑色的;
- 每个叶子节点都是黑色的空节点,也就是说,叶子节点不存储数据;
- 任何相邻的节点都不能同时为红色,也就是说,红色节点是被黑色节点隔开的;
- 每个节点,从该节点到达其可达叶子节点的所有路径,都包含相同数目的黑色节点;
这里的第二点要求“叶子节点都是黑色的空节点”,稍微有些奇怪,它主要是为了简化红黑树的代码实现而设置的
(2)为什么说红黑树是“近似平衡”的?
二叉查找树很多操作的性能都跟树的高度成正比。一棵极其平衡的二叉树(满二叉树或完全二叉树)的高度大约是 log2n,所以如果要证明红黑树是近似平衡的,我们只需要分析,红黑树的高度是否比较稳定地趋近 log2n 就好了。
首先,我们来看,如果我们将红色节点从红黑树中去掉,那单纯包含黑色节点的红黑树的高度是多少呢?
红色节点删除之后,有些节点就没有父节点了,它们会直接拿这些节点的祖父节点(父节点的父节点)作为父节点。所以,之前的二叉树就变成了四叉树。
前面红黑树的定义里有这么一条:从任意节点到可达的叶子节点的每个路径包含相同数目的黑色节点。我们从四叉树中取出某些节点,放到叶节点位置,四叉树就变成了完全二叉树。所以,仅包含黑色节点的四叉树的高度,比包含相同节点个数的完全二叉树的高度还要小。上一节我们说,完全二叉树的高度近似 log2n,这里的四叉“黑树”的高度要低于完全二叉树,所以去掉红色节点的“黑树”的高度也不会超过 log2n。
我们现在知道只包含黑色节点的“黑树”的高度,那我们现在把红色节点加回去,高度会变成多少呢?
从上面我画的红黑树的例子和定义看,在红黑树中,红色节点不能相邻,也就是说,有一个红色节点就要至少有一个黑色节点,将它跟其他红色节点隔开。红黑树中包含最多黑色节点的路径不会超过 log2n,所以加入红色节点之后,最长路径不会超过 2log2n,也就是说,红黑树的高度近似 2log2n。所以,红黑树的高度只比高度平衡的 AVL 树的高度(log2n)仅仅大了一倍,在性能上,下降得并不多。这样推导出来的结果不够精确,实际上红黑树的性能更好。
(3)我们刚刚提到了很多平衡二叉查找树,现在我们就来看下,为什么在工程中大家都喜欢用红黑树这种平衡二叉查找树?
AVL 树是一种高度平衡的二叉树,所以查找的效率非常高,但是,有利就有弊,AVL 树为了维持这种高度的平衡,就要付出更多的代价。每次插入、删除都要做调整,就比较复杂、耗时。所以,对于有频繁的插入、删除操作的数据集合,使用 AVL 树的代价就有点高了。
红黑树只是做到了近似平衡,并不是严格的平衡,所以在维护平衡的成本上,要比 AVL 树要低。所以,红黑树的插入、删除、查找各种操作性能都比较稳定。对于工程应用来说,要面对各种异常情况,为了支撑这种工业级的应用,我们更倾向于这种性能稳定的平衡二叉查找树。
我们学习数据结构和算法,要学习它的由来、特性、适用的场景以及它能解决的问题。对于红黑树,也不例外。你如果能搞懂这几个问题,其实就已经足够了。
- 红黑树是一种平衡二叉查找树。它是为了解决普通二叉查找树在数据更新的过程中,复杂度退化的问题而产生的。
- 红黑树的高度近似 log2n,所以它是近似平衡,插入、删除、查找操作的时间复杂度都是 O(logn)。
- 因为红黑树是一种性能非常稳定的二叉查找树,所以,在工程中,但凡是用到动态插入、删除、查找数据的场景,都可以用到它。不过,它实现起来比较复杂,如果自己写代码实现,难度会有些高,这个时候,我们其实更倾向用跳表来替代它。
(4)动态数据结构支持动态地数据插入、删除、查找操作,除了红黑树,我们前面还学习过哪些呢?能对比一下各自的优势、劣势,以及应用场景吗?
- 散列表:插入删除查找都是O(1), 是最常用的,但其缺点是不能顺序遍历以及扩容缩容的性能损耗。适用于那些不需要顺序遍历,数据更新不那么频繁的。
- 跳表:插入删除查找都是O(logn), 并且能顺序遍历。缺点是空间复杂度O(n)。适用于不那么在意内存空间的,其顺序遍历和区间查找非常方便。
- 红黑树:插入删除查找都是O(logn), 中序遍历即是顺序遍历,稳定。缺点是难以实现,去查找不方便。其实跳表更佳,但红黑树已经用于很多地方了。
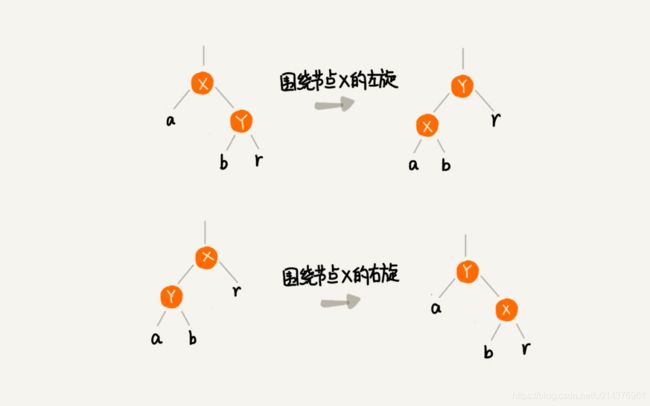
(5)左旋和右旋
左旋全称其实是叫围绕某个节点的左旋,那右旋的全称估计你已经猜到了,就叫围绕某个节点的右旋。
二,递归树
1.分析归并排序复杂度
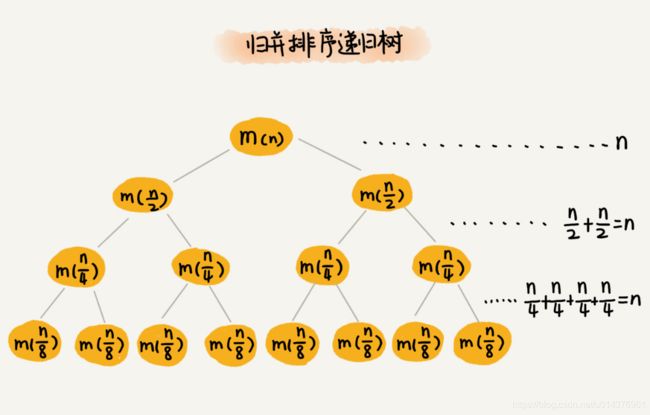
我们只需要知道这棵树的高度 h,用高度 h 乘以每一层的时间消耗 n,就可以得到总的时间复杂度 O(n∗h)。从归并排序的原理和递归树,可以看出来,归并排序递归树是一棵满二叉树。我们前两节中讲到,满二叉树的高度大约是 log2n,所以,归并排序递归实现的时间复杂度就是 O(nlogn)。
2.分析快速排序的时间复杂度
我们假设平均情况下,每次分区之后,两个分区的大小比例为 1:k。当 k=9 时,如果用递推公式的方法来求解时间复杂度的话,递推公式就写成 T(n)=T(1/10n)+T(9/10n)+n。
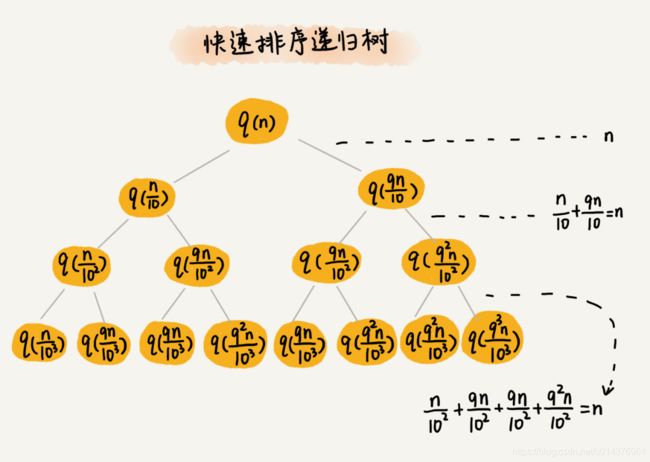
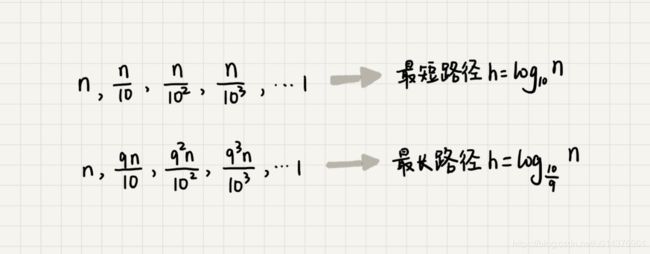
所以,遍历数据的个数总和就介于 nlog10n 和 nlog910n 之间。根据复杂度的大 O 表示法,对数复杂度的底数不管是多少,我们统一写成 logn,所以,当分区大小比例是 1:9 时,快速排序的时间复杂度仍然是 O(nlogn)。
3.分析斐波那契数列的时间复杂度

f(n) 分解为 f(n−1) 和 f(n−2),每次数据规模都是 −1 或者 −2,叶子节点的数据规模是 1 或者 2。所以,从根节点走到叶子节点,每条路径是长短不一的。如果每次都是 −1,那最长路径大约就是 n;如果每次都是 −2,那最短路径大约就是 n/2。
每次分解之后的合并操作只需要一次加法运算,我们把这次加法运算的时间消耗记作 1。所以,从上往下,第一层的总时间消耗是 1,第二层的总时间消耗是 2,第三层的总时间消耗就是 4。依次类推,第 k 层的时间消耗就是 2k−1,那整个算法的总的时间消耗就是每一层时间消耗之和。如果路径长度都为 n,那这个总和就是 2n−1。
如果路径长度都为 n,那这个总和就是 2n−1。

如果路径长度都是 n/2 ,那整个算法的总的时间消耗就是 2(n/2)−1。

4.分析全排列的时间复杂度
假设数组中存储的是1,2, 3...n。
f(1,2,...n) = {最后一位是1, f(n-1)} + {最后一位是2, f(n-1)} +...+{最后一位是n, f(n-1)}。
// 调用方式:
// int[]a = a={1, 2, 3, 4}; printPermutations(a, 4, 4);
// k表示要处理的子数组的数据个数
public void printPermutations(int[] data, int n, int k) {
if (k == 1) {
for (int i = 0; i < n; ++i) {
System.out.print(data[i] + " ");
}
System.out.println();
}
for (int i = 0; i < k; ++i) {
int tmp = data[i];
data[i] = data[k-1];
data[k-1] = tmp;
printPermutations(data, n, k - 1);
tmp = data[i];
data[i] = data[k-1];
data[k-1] = tmp;
}
}
第 k 层总的交换次数就是 n∗(n−1)∗(n−2)∗…∗(n−k+1)。最后一层的交换次数就是 n∗(n−1)∗(n−2)∗…∗2∗1。每一层的交换次数之和就是总的交换次数。
n + n*(n-1) + n*(n-1)*(n-2) +... + n*(n-1)*(n-2)*...*2*1这个公式的求和比较复杂,我们看最后一个数,n∗(n−1)∗(n−2)∗…∗2∗1 等于 n!,而前面的 n−1 个数都小于最后一个数,所以,总和肯定小于 n∗n!,也就是说,全排列的递归算法的时间复杂度大于 O(n!),小于 O(n∗n!),虽然我们没法知道非常精确的时间复杂度,但是这样一个范围已经让我们知道,全排列的时间复杂度是非常高的。
三,堆和堆排序
1,如何理解“堆”?
- 堆必须是一个完全二叉树
- 堆中的每个节点的值必须大于等于(或者小于等于)其子树中每个节点的值
2,往堆中插入一个元素
堆化非常简单,就是顺着节点所在的路径,向上或者向下,对比,然后交换。下面是从下往上的堆化方法:

public class Heap {
private int[] a; // 数组,从下标1开始存储数据
private int n; // 堆可以存储的最大数据个数
private int count; // 堆中已经存储的数据个数
public Heap(int capacity) {
a = new int[capacity + 1];
n = capacity;
count = 0;
}
public void insert(int data) {
if (count >= n) return; // 堆满了
++count;
a[count] = data;
int i = count;
while (i/2 > 0 && a[i] > a[i/2]) { // 自下往上堆化
swap(a, i, i/2); // swap()函数作用:交换下标为i和i/2的两个元素
i = i/2;
}
}
}3,删除堆顶元素
我们把最后一个节点放到堆顶,然后利用同样的父子节点对比方法。对于不满足父子节点大小关系的,互换两个节点,并且重复进行这个过程,直到父子节点之间满足大小关系为止。这就是从上往下的堆化方法。
public void removeMax() {
if (count == 0) return -1; // 堆中没有数据
a[1] = a[count];
--count;
heapify(a, count, 1);
}
private void heapify(int[] a, int n, int i) { // 自上往下堆化
while (true) {
int maxPos = i;
if (i*2 <= n && a[i] < a[i*2]) maxPos = i*2;
if (i*2+1 <= n && a[maxPos] < a[i*2+1]) maxPos = i*2+1;
if (maxPos == i) break;
swap(a, i, maxPos);
i = maxPos;
}
}一个包含 n 个节点的完全二叉树,树的高度不会超过 log2n。堆化的过程是顺着节点所在路径比较交换的,所以堆化的时间复杂度跟树的高度成正比,也就是 O(logn)。插入数据和删除堆顶元素的主要逻辑就是堆化,所以,往堆中插入一个元素和删除堆顶元素的时间复杂度都是 O(logn)。
4,堆排序实现
(1)建堆
从后往前处理数组,并且每个数据都是从上往下堆化:
private static void buildHeap(int[] a, int n) {
for (int i = n/2; i >= 1; --i) {
heapify(a, n, i);
}
}
private static void heapify(int[] a, int n, int i) {
while (true) {
int maxPos = i;
if (i*2 <= n && a[i] < a[i*2]) maxPos = i*2;
if (i*2+1 <= n && a[maxPos] < a[i*2+1]) maxPos = i*2+1;
if (maxPos == i) break;
swap(a, i, maxPos);
i = maxPos;
}
}我们对下标从n/2开始到 1 的数据进行堆化,下标是 n/2+1 到 n 的节点是叶子节点,我们不需要堆化。
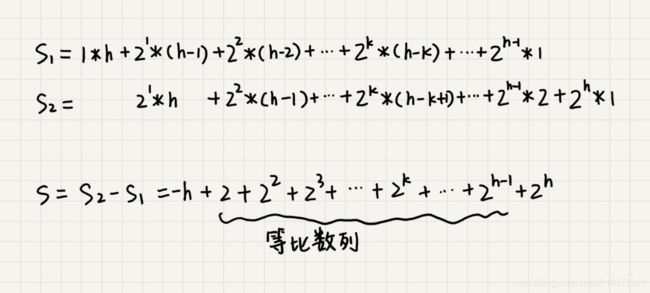
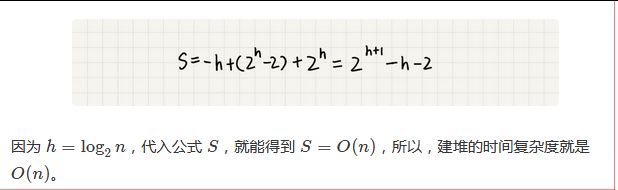
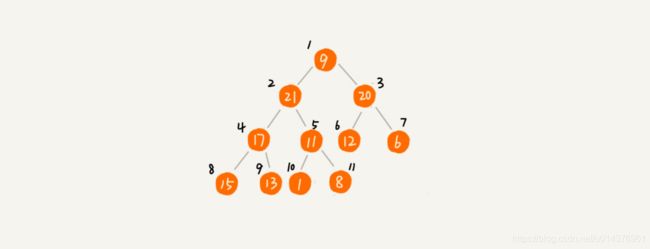
因为叶子节点不需要堆化,所以需要堆化的节点从倒数第二层开始。每个节点堆化的过程中,需要比较和交换的节点个数,跟这个节点的高度 k 成正比。我把每一层的节点个数和对应的高度画了出来,你可以看看。我们只需要将每个节点的高度求和,得出的就是建堆的时间复杂度。

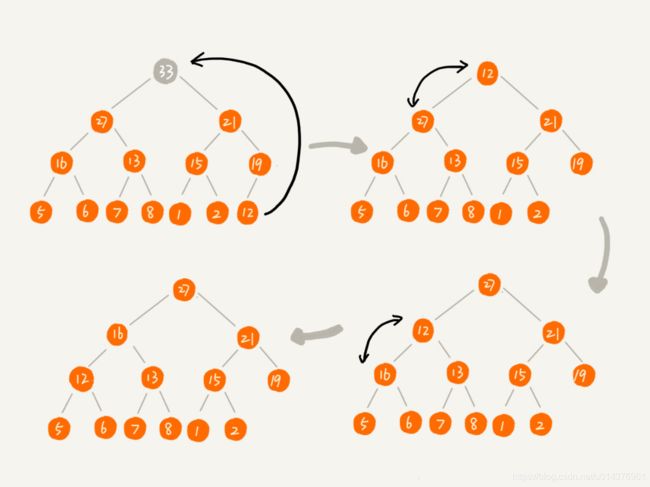
(2)排序
建堆结束之后,数组中的数据已经是按照大顶堆的特性来组织的。数组中的第一个元素就是堆顶,也就是最大的元素。我们把它跟最后一个元素交换,那最大元素就放到了下标为 n 的位置。这个过程有点类似上面讲的“删除堆顶元素”的操作,当堆顶元素移除之后,我们把下标为 n 的元素放到堆顶,然后再通过堆化的方法,将剩下的 n−1 个元素重新构建成堆。

// n表示数据的个数,数组a中的数据从下标1到n的位置。
public static void sort(int[] a, int n) {
buildHeap(a, n);
int k = n;
while (k > 1) {
swap(a, 1, k);
--k;
heapify(a, k, 1);
}
}整个堆排序的过程,都只需要极个别临时存储空间,所以堆排序是原地排序算法。堆排序包括建堆和排序两个操作,建堆过程的时间复杂度是 O(n),排序过程的时间复杂度是 O(nlogn),所以,堆排序整体的时间复杂度是 O(nlogn)。堆排序不是稳定的排序算法,因为在排序的过程,存在将堆的最后一个节点跟堆顶节点互换的操作,所以就有可能改变值相同数据的原始相对顺序。在前面的讲解以及代码中,我都假设,堆中的数据是从数组下标为 1 的位置开始存储。那如果从 0 开始存储,实际上处理思路是没有任何变化的,唯一变化的,可能就是,代码实现的时候,计算子节点和父节点的下标的公式改变了。如果节点的下标是 i,那左子节点的下标就是 2∗i+1,右子节点的下标就是 2∗i+2,父节点的下标就是 (i-1)/2。
5,为什么快速排序要比堆排序性能好
- 第一点,堆排序数据访问的方式没有快速排序友好
对于快速排序来说,数据是顺序访问的。而对于堆排序来说,数据是跳着访问的。 比如,堆排序中,最重要的一个操作就是数据的堆化。比如下面这个例子,对堆顶节点进行堆化,会依次访问数组下标是 1,2,4,8 的元素,而不是像快速排序那样,局部顺序访问,所以,这样对 CPU 缓存是不友好的。
- 第二点,对于同样的数据,在排序过程中,堆排序算法的数据交换次数要多于快速排序。
堆排序的第一步是建堆,建堆的过程会打乱数据原有的相对先后顺序,导致原数据的有序度降低。比如,对于一组已经有序的数据来说,经过建堆之后,数据反而变得更无序了。快速排序数据交换的次数不会比逆序度多。
6,总结
- 堆是一种完全二叉树。它最大的特性是:每个节点的值都大于等于(或小于等于)其子树节点的值。因此,堆被分成了两类,大顶堆和小顶堆。
- 堆中比较重要的两个操作是插入一个数据和删除堆顶元素。这两个操作都要用到堆化。插入一个数据的时候,我们把新插入的数据放到数组的最后,然后从下往上堆化;删除堆顶数据的时候,我们把数组中的最后一个元素放到堆顶,然后从上往下堆化。这两个操作时间复杂度都是 O(logn)。
- 除此之外,我们还讲了堆的一个经典应用,堆排序。堆排序包含两个过程,建堆和排序。我们将下标从 n/2 到 1 的节点,依次进行从上到下的堆化操作,然后就可以将数组中的数据组织成堆这种数据结构。接下来,我们迭代地将堆顶的元素放到堆的末尾,并将堆的大小减一,然后再堆化,重复这个过程,直到堆中只剩下一个元素,整个数组中的数据就都有序排列了。
四,堆的应用
1,堆的应用一:优先级队列
如何实现一个优先级队列呢?方法有很多,但是用堆来实现是最直接、最高效的。这是因为,堆和优先级队列非常相似。一个堆就可以看作一个优先级队列。很多时候,它们只是概念上的区分而已。往优先级队列中插入一个元素,就相当于往堆中插入一个元素;从优先级队列中取出优先级最高的元素,就相当于取出堆顶元素。
(1) 合并有序小文件
假设我们有 100 个小文件,每个文件的大小是 100MB,每个文件中存储的都是有序的字符串。我们希望将这些 100 个小文件合并成一个有序的大文件。这里就会用到优先级队列。
我们将从小文件中取出来的字符串放入到小顶堆中,那堆顶的元素,也就是优先级队列队首的元素,就是最小的字符串。我们将这个字符串放入到大文件中,并将其从堆中删除。然后再从小文件中取出下一个字符串,放入到堆中。循环这个过程,就可以将 100 个小文件中的数据依次放入到大文件中。
(2)高性能定时器
假设我们有一个定时器,定时器中维护了很多定时任务,每个任务都设定了一个要触发执行的时间点。定时器每过一个很小的单位时间(比如 1 秒),就扫描一遍任务,看是否有任务到达设定的执行时间。如果到达了,就拿出来执行。但是,这样每过 1 秒就扫描一遍任务列表的做法比较低效,主要原因有两点:第一,任务的约定执行时间离当前时间可能还有很久,这样前面很多次扫描其实都是徒劳的;第二,每次都要扫描整个任务列表,如果任务列表很大的话,势必会比较耗时。
但是,这样每过 1 秒就扫描一遍任务列表的做法比较低效,主要原因有两点:第一,任务的约定执行时间离当前时间可能还有很久,这样前面很多次扫描其实都是徒劳的;第二,每次都要扫描整个任务列表,如果任务列表很大的话,势必会比较耗时。
针对这些问题,我们就可以用优先级队列来解决。我们按照任务设定的执行时间,将这些任务存储在优先级队列中,队列首部(也就是小顶堆的堆顶)存储的是最先执行的任务。这样,定时器就不需要每隔 1 秒就扫描一遍任务列表了。它拿队首任务的执行时间点,与当前时间点相减,得到一个时间间隔 T。这个时间间隔 T 就是,从当前时间开始,需要等待多久,才会有第一个任务需要被执行。这样,定时器就可以设定在 T 秒之后,再来执行任务。从当前时间点到(T-1)秒这段时间里,定时器都不需要做任何事情。
2,堆的应用二:利用堆求 Top K
针对静态数据,如何在一个包含 n 个数据的数组中,查找前 K 大数据呢?我们可以维护一个大小为 K 的小顶堆,顺序遍历数组,从数组中取出数据与堆顶元素比较。如果比堆顶元素大,我们就把堆顶元素删除,并且将这个元素插入到堆中;如果比堆顶元素小,则不做处理,继续遍历数组。这样等数组中的数据都遍历完之后,堆中的数据就是前 K 大数据了。遍历数组需要 O(n) 的时间复杂度,一次堆化操作需要 O(logK) 的时间复杂度,所以最坏情况下,n 个元素都入堆一次,时间复杂度就是 O(nlogK)。
针对动态数据求得 Top K 就是实时 Top K。实际上,我们可以一直都维护一个 K 大小的小顶堆,当有数据被添加到集合中时,我们就拿它与堆顶的元素对比。如果比堆顶元素大,我们就把堆顶元素删除,并且将这个元素插入到堆中;如果比堆顶元素小,则不做处理。这样,无论任何时候需要查询当前的前 K 大数据,我们都可以立刻返回给他。
3,堆的应用三:利用堆求中位数
对于一组静态数据,中位数是固定的,我们可以先排序,第 2n 个数据就是中位数。每次询问中位数的时候,我们直接返回这个固定的值就好了。所以,尽管排序的代价比较大,但是边际成本会很小。但是,如果我们面对的是动态数据集合,中位数在不停地变动,如果再用先排序的方法,每次询问中位数的时候,都要先进行排序,那效率就不高了。
我们需要维护两个堆,一个大顶堆,一个小顶堆。大顶堆中存储前半部分数据,小顶堆中存储后半部分数据,且小顶堆中的数据都大于大顶堆中的数据。也就是说,如果有 n 个数据,n 是偶数,我们从小到大排序,那前 n/2 个数据存储在大顶堆中,后 n/2个数据存储在小顶堆中。这样,大顶堆中的堆顶元素就是我们要找的中位数。如果 n 是奇数,情况是类似的,大顶堆就存储 n/2+1 个数据,小顶堆中就存储 n/2 个数据。
如果新加入的数据小于等于大顶堆的堆顶元素,我们就将这个新数据插入到大顶堆;否则,我们就将这个新数据插入到小顶堆。这个时候就有可能出现,两个堆中的数据个数不符合前面约定的情况:如果 n 是偶数,两个堆中的数据个数都是 n/2;如果 n 是奇数,大顶堆有 n/2+1 个数据,小顶堆有 n/2 个数据。这个时候,我们可以从一个堆中不停地将堆顶元素移动到另一个堆,通过这样的调整,来让两个堆中的数据满足上面的约定。
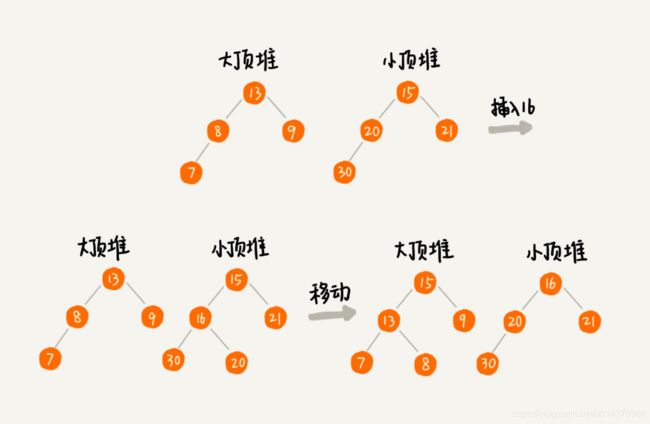
于是,我们就可以利用两个堆,一个大顶堆、一个小顶堆,实现在动态数据集合中求中位数的操作。插入数据因为需要涉及堆化,所以时间复杂度变成了 O(logn),但是求中位数我们只需要返回大顶堆的堆顶元素就可以了,所以时间复杂度就是 O(1)。
4,假设现在我们有一个包含 10 亿个搜索关键词的日志文件,如何快速获取到 Top 10 最热门的搜索关键词呢?
(1)数据存储在一个散列表中
因为用户搜索的关键词,有很多可能都是重复的,所以我们首先要统计每个搜索关键词出现的频率。我们可以通过散列表、平衡二叉查找树或者其他一些支持快速查找、插入的数据结构,来记录关键词及其出现的次数。假设我们选用散列表。我们就顺序扫描这 10 亿个搜索关键词。当扫描到某个关键词时,我们去散列表中查询。如果存在,我们就将对应的次数加一;如果不存在,我们就将它插入到散列表,并记录次数为 1。以此类推,等遍历完这 10 亿个搜索关键词之后,散列表中就存储了不重复的搜索关键词以及出现的次数。
然后,我们再根据前面讲的用堆求 Top K 的方法,建立一个大小为 10 的小顶堆,遍历散列表,依次取出每个搜索关键词及对应出现的次数,然后与堆顶的搜索关键词对比。如果出现次数比堆顶搜索关键词的次数多,那就删除堆顶的关键词,将这个出现次数更多的关键词加入到堆中。以此类推,当遍历完整个散列表中的搜索关键词之后,堆中的搜索关键词就是出现次数最多的 Top 10 搜索关键词了。
(2)将数据分散存储到不同的文件中
10 亿的关键词还是很多的。我们假设 10 亿条搜索关键词中不重复的有 1 亿条,如果每个搜索关键词的平均长度是 50 个字节,那存储 1 亿个关键词起码需要 5GB 的内存空间,而散列表因为要避免频繁冲突,不会选择太大的装载因子,所以消耗的内存空间就更多了。而我们的机器只有 1GB 的可用内存空间,所以我们无法一次性将所有的搜索关键词加入到内存中。这个时候该怎么办呢?我们在哈希算法那一节讲过,相同数据经过哈希算法得到的哈希值是一样的。我们可以根据哈希算法的这个特点,将 10 亿条搜索关键词先通过哈希算法分片到 10 个文件中。具体可以这样做:我们创建 10 个空文件 00,01,02,……,09。我们遍历这 10 亿个关键词,并且通过某个哈希算法对其求哈希值,然后哈希值同 10 取模,得到的结果就是这个搜索关键词应该被分到的文件编号。
对这 10 亿个关键词分片之后,每个文件都只有 1 亿的关键词,去除掉重复的,可能就只有 1000 万个,每个关键词平均 50 个字节,所以总的大小就是 500MB。1GB 的内存完全可以放得下。我们针对每个包含 1 亿条搜索关键词的文件,利用散列表和堆,分别求出 Top 10,然后把这个 10 个 Top 10 放在一块,然后取这 100 个关键词中,出现次数最多的 10 个关键词,这就是这 10 亿数据中的 Top 10 最频繁的搜索关键词了。
5,有一个访问量非常大的新闻网站,我们希望将点击量排名 Top 10 的新闻摘要,滚动显示在网站首页 banner 上,并且每隔 1 小时更新一次。如果你是负责开发这个功能的工程师,你会如何来实现呢?
- 对每篇新闻摘要计算一个hashcode,并建立摘要与hashcode的关联关系,使用map存储,以hashCode为key,新闻摘要为值
- 按每小时一个文件的方式记录下被点击的摘要的hashCode
- 当一个小时结果后,上一个小时的文件被关闭,开始计算上一个小时的点击top10
- 将hashcode分片到多个文件中,通过对hashCode取模运算,即可将相同的hashCode分片到相同的文件中
- 针对每个文件取top10的hashCode,使用Map
- 再针对所有分片计算一个总的top10,最后合并的逻辑也是使用小顶堆,计算top10
- 如果仅展示前一个小时的top10,计算结束
- 如果需要展示全天,需要与上一次的计算按hashCode进行合并,然后在这合并的数据中取top10
- 在展示时,将计算得到的top10的hashcode,转化为新闻摘要显示即可
6,总结
优先级队列、求 Top K 问题和求中位数问题:
- 优先级队列是一种特殊的队列,优先级高的数据先出队,而不再像普通的队列那样,先进先出。实际上,堆就可以看作优先级队列,只是称谓不一样罢了。
- 求 Top K 问题又可以分为针对静态数据和针对动态数据,只需要利用一个堆,就可以做到非常高效率的查询 Top K 的数据。
- 求中位数实际上还有很多变形,比如求 99 百分位数据、90 百分位数据等,处理的思路都是一样的,即利用两个堆,一个大顶堆,一个小顶堆,随着数据的动态添加,动态调整两个堆中的数据,最后大顶堆的堆顶元素就是要求的数据。
五,图
1,图的表示
微博、微信是两种“图”,前者是有向图,后者是无向图。
数据结构是为算法服务的,所以具体选择哪种存储方法,与期望支持的操作有关系。针对微博用户关系,假设我们需要支持下面这样几个操作:
- 判断用户 A 是否关注了用户 B;
- 判断用户 A 是否是用户 B 的粉丝;
- 用户 A 关注用户 B;
- 用户 A 取消关注用户 B;
- 根据用户名称的首字母排序,分页获取用户的粉丝列表;
- 根据用户名称的首字母排序,分页获取用户的关注列表。
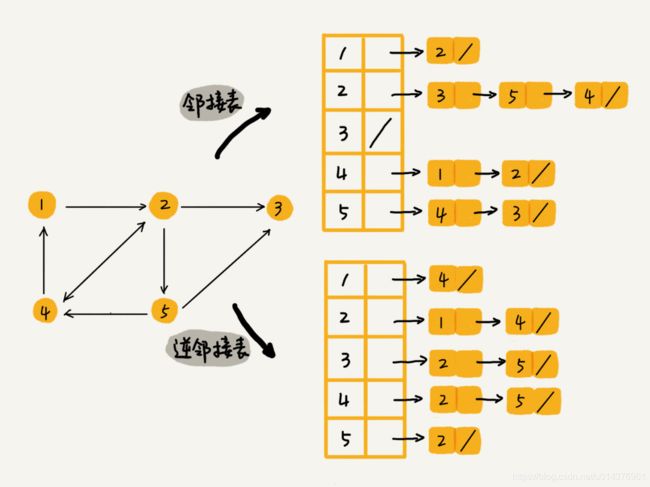
关于如何存储一个图,前面我们讲到两种主要的存储方法,邻接矩阵和邻接表。因为社交网络是一张稀疏图,使用邻接矩阵存储比较浪费存储空间。所以,这里我们采用邻接表来存储。不过,用一个邻接表来存储这种有向图是不够的。我们去查找某个用户关注了哪些用户非常容易,但是如果要想知道某个用户都被哪些用户关注了,也就是用户的粉丝列表,是非常困难的。
基于此,我们需要一个逆邻接表。邻接表中存储了用户的关注关系,逆邻接表中存储的是用户的被关注关系。对应到图上,邻接表中,每个顶点的链表中,存储的就是这个顶点指向的顶点,逆邻接表中,每个顶点的链表中,存储的是指向这个顶点的顶点。如果要查找某个用户关注了哪些用户,我们可以在邻接表中查找;如果要查找某个用户被哪些用户关注了,我们从逆邻接表中查找。
基础的邻接表不适合快速判断两个用户之间是否是关注与被关注的关系,所以我们选择改进版本,将邻接表中的链表改为支持快速查找的动态数据结构。选择哪种动态数据结构呢?红黑树、跳表、有序动态数组还是散列表呢?因为我们需要按照用户名称的首字母排序,分页来获取用户的粉丝列表或者关注列表,用跳表这种结构再合适不过了。这是因为,跳表插入、删除、查找都非常高效,时间复杂度是 O(logn),空间复杂度上稍高,是 O(n)。最重要的一点,跳表中存储的数据本来就是有序的了,分页获取粉丝列表或关注列表,就非常高效。
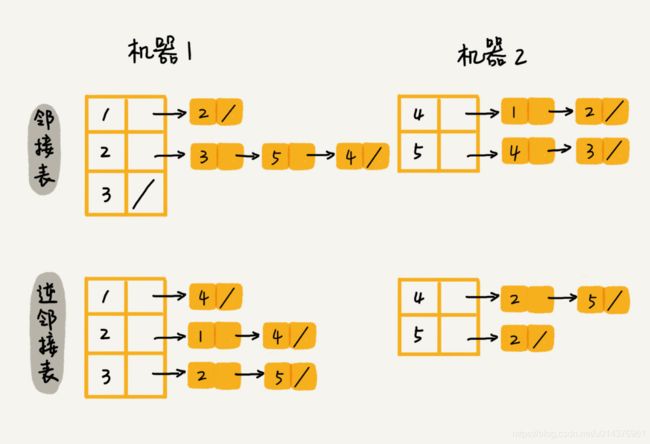
如果对于小规模的数据,比如社交网络中只有几万、几十万个用户,我们可以将整个社交关系存储在内存中,上面的解决思路是没有问题的。但是如果像微博那样有上亿的用户,数据规模太大,我们就无法全部存储在内存中了。这个时候该怎么办呢?我们可以通过哈希算法等数据分片方式,将邻接表存储在不同的机器上。你可以看下面这幅图,我们在机器 1 上存储顶点 1,2,3 的邻接表,在机器 2 上,存储顶点 4,5 的邻接表。逆邻接表的处理方式也一样。当要查询顶点与顶点关系的时候,我们就利用同样的哈希算法,先定位顶点所在的机器,然后再在相应的机器上查找。
微信好友关系存储方式。无向图,也可以使用邻接表的方式存储每个人所对应的好友列表。为了支持快速查找,好友列表可以使用红黑树存储。
2,深度和广度优先搜索
深度优先搜索算法和广度优先搜索算法,既可以用在无向图,也可以用在有向图上。在本文中,针对无向图来讲解。
public class Graph { // 无向图
private int v; // 顶点的个数
private LinkedList adj[]; // 邻接表
public Graph(int v) {
this.v = v;
adj = new LinkedList[v];
for (int i=0; i();
}
}
public void addEdge(int s, int t) { // 无向图一条边存两次
adj[s].add(t);
adj[t].add(s);
}
} (1)广度优先搜索(BFS)
广度优先搜索(Breadth-First-Search),我们平常都把简称为 BFS。直观地讲,它其实就是一种“地毯式”层层推进的搜索策略,即先查找离起始顶点最近的,然后是次近的,依次往外搜索。
public void bfs(int s, int t) {
if (s == t) return;
boolean[] visited = new boolean[v];
visited[s]=true;
Queue queue = new LinkedList<>();
queue.add(s);
int[] prev = new int[v];
for (int i = 0; i < v; ++i) {
prev[i] = -1;
}
while (queue.size() != 0) {
int w = queue.poll();
for (int i = 0; i < adj[w].size(); ++i) {
int q = adj[w].get(i);
if (!visited[q]) {
prev[q] = w;
if (q == t) {
print(prev, s, t);
return;
}
visited[q] = true;
queue.add(q);
}
}
}
}
private void print(int[] prev, int s, int t) { // 递归打印s->t的路径
if (prev[t] != -1 && t != s) {
print(prev, s, prev[t]);
}
System.out.print(t + " ");
} 最坏情况下,终止顶点 t 离起始顶点 s 很远,需要遍历完整个图才能找到。这个时候,每个顶点都要进出一遍队列,每个边也都会被访问一次,所以,广度优先搜索的时间复杂度是 O(V+E),其中,V 表示顶点的个数,E 表示边的个数。当然,对于一个连通图来说,也就是说一个图中的所有顶点都是连通的,E 肯定要大于等于 V-1,所以,广度优先搜索的时间复杂度也可以简写为 O(E)。广度优先搜索的空间消耗主要在几个辅助变量 visited 数组、queue 队列、prev 数组上。这三个存储空间的大小都不会超过顶点的个数,所以空间复杂度是 O(V)。
(2)深度优先搜索(DFS)
深度优先搜索(Depth-First-Search),简称 DFS。最直观的例子就是“走迷宫”。假设你站在迷宫的某个岔路口,然后想找到出口。你随意选择一个岔路口来走,走着走着发现走不通的时候,你就回退到上一个岔路口,重新选择一条路继续走,直到最终找到出口。这种走法就是一种深度优先搜索策略。
public void dfs(int s, int t) {
found = false;
boolean[] visited = new boolean[v];
int[] prev = new int[v];
for (int i = 0; i < v; ++i) {
prev[i] = -1;
}
recurDfs(s, t, visited, prev);
print(prev, s, t);
}
private void recurDfs(int w, int t, boolean[] visited, int[] prev) {
visited[w] = true;
if (w == t) {
return;
}
for (int i = 0; i < adj[w].size(); ++i) {
int q = adj[w].get(i);
if (!visited[q]) {
prev[q] = w;
recurDfs(q, t, visited, prev);
}
}
}从我前面画的图可以看出,每条边最多会被访问两次,一次是遍历,一次是回退。所以,图上的深度优先搜索算法的时间复杂度是 O(E),E 表示边的个数。
深度优先搜索算法的消耗内存主要是 visited、prev 数组和递归调用栈。visited、prev 数组的大小跟顶点的个数 V 成正比,递归调用栈的最大深度不会超过顶点的个数,所以总的空间复杂度就是 O(V)。
(3)如何找出社交网络中某个用户的三度好友关系?
这个问题就非常适合用图的广度优先搜索算法来解决,因为广度优先搜索是层层往外推进的。首先,遍历与起始顶点最近的一层顶点,也就是用户的一度好友,然后再遍历与用户距离的边数为 2 的顶点,也就是二度好友关系,以及与用户距离的边数为 3 的顶点,也就是三度好友关系。我们只需要稍加改造一下广度优先搜索代码,用一个数组来记录每个顶点与起始顶点的距离,非常容易就可以找出三度好友关系。
(4)总结
广度优先搜索,通俗的理解就是,地毯式层层推进,从起始顶点开始,依次往外遍历。广度优先搜索需要借助队列来实现,遍历得到的路径就是,起始顶点到终止顶点的最短路径。深度优先搜索用的是回溯思想,非常适合用递归实现。换种说法,深度优先搜索是借助栈来实现的。在执行效率方面,深度优先和广度优先搜索的时间复杂度都是 O(E),空间复杂度是 O(V)。
六,字符串匹配算法
1,BF 算法
BF 算法中的 BF 是 Brute Force 的缩写,中文叫作暴力匹配算法,也叫朴素匹配算法。
我们在字符串 A 中查找字符串 B,那字符串 A 就是主串,字符串 B 就是模式串。我们把主串的长度记作 n,模式串的长度记作 m。因为我们是在主串中查找模式串,所以 n>m。作为最简单、最暴力的字符串匹配算法,BF 算法的思想可以用一句话来概括,那就是,我们在主串中,检查起始位置分别是 0、1、2…n-m 且长度为 m 的 n-m+1 个子串,看有没有跟模式串匹配的。
在极端情况下,比如主串是“aaaaa…aaaaaa”(省略号表示有很多重复的字符 a),模式串是“aaaaab”。我们每次都比对 m 个字符,要比对 n-m+1 次,所以,这种算法的最坏情况时间复杂度是 O(n*m)。
尽管理论上,BF 算法的时间复杂度很高,是 O(n*m),但在实际的开发中,它却是一个比较常用的字符串匹配算法。为什么这么说呢?原因有两点。
- 第一,实际的软件开发中,大部分情况下,模式串和主串的长度都不会太长。而且每次模式串与主串中的子串匹配的时候,当中途遇到不能匹配的字符的时候,就可以就停止了,不需要把 m 个字符都比对一下。所以,尽管理论上的最坏情况时间复杂度是 O(n*m),但是,统计意义上,大部分情况下,算法执行效率要比这个高很多。
- 第二,朴素字符串匹配算法思想简单,代码实现也非常简单。简单意味着不容易出错,如果有 bug 也容易暴露和修复。
2,RK 算法
RK 算法的全称叫 Rabin-Karp 算法,是由它的两位发明者 Rabin 和 Karp 的名字来命名的。这个算法理解起来也不是很难。我个人觉得,它其实就是刚刚讲的 BF 算法的升级版。
RK 算法的思路是这样的:我们通过哈希算法对主串中的 n-m+1 个子串分别求哈希值,然后逐个与模式串的哈希值比较大小。如果某个子串的哈希值与模式串相等,那就说明对应的子串和模式串匹配了。因为哈希值是一个数字,数字之间比较是否相等是非常快速的,所以模式串和子串比较的效率就提高了。
这种哈希算法有一个特点,在主串中,相邻两个子串的哈希值的计算公式有一定关系。
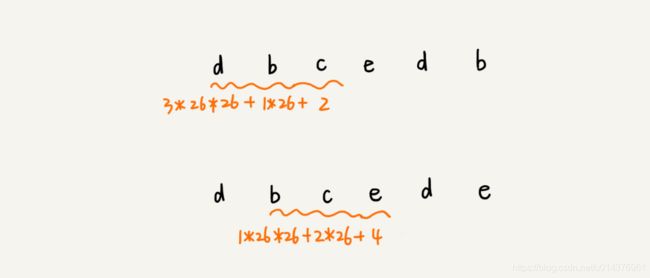
从这里例子中,我们很容易就能得出这样的规律:相邻两个子串 s[i-1] 和 s[i](i 表示子串在主串中的起始位置,子串的长度都为 m),对应的哈希值计算公式有交集,也就是说,我们可以使用 s[i-1] 的哈希值很快的计算出 s[i] 的哈希值。如果用公式表示的话,就是下面这个样子:
这里有一个小细节需要注意,那就是 26^(m-1) 这部分的计算,我们可以通过查表的方法来提高效率。我们事先计算好 26^0、26^1、26^2……26^(m-1),并且存储在一个长度为 m 的数组中,公式中的“次方”就对应数组的下标。当我们需要计算 26 的 x 次方的时候,就可以从数组的下标为 x 的位置取值,直接使用,省去了计算的时间。
整个 RK 算法包含两部分,计算子串哈希值和模式串哈希值与子串哈希值之间的比较。第一部分,我们前面也分析了,可以通过设计特殊的哈希算法,只需要扫描一遍主串就能计算出所有子串的哈希值了,所以这部分的时间复杂度是 O(n)。模式串哈希值与每个子串哈希值之间的比较的时间复杂度是 O(1),总共需要比较 n-m+1 个子串的哈希值,所以,这部分的时间复杂度也是 O(n)。所以,RK 算法整体的时间复杂度就是 O(n)。
总结
- BF 算法是最简单、粗暴的字符串匹配算法,它的实现思路是,拿模式串与主串中是所有子串匹配,看是否有能匹配的子串。所以,时间复杂度也比较高,是 O(n*m),n、m 表示主串和模式串的长度。不过,在实际的软件开发中,因为这种算法实现简单,对于处理小规模的字符串匹配很好用。
- RK 算法是借助哈希算法对 BF 算法进行改造,即对每个子串分别求哈希值,然后拿子串的哈希值与模式串的哈希值比较,减少了比较的时间。所以,理想情况下,RK 算法的时间复杂度是 O(n),跟 BF 算法相比,效率提高了很多。不过这样的效率取决于哈希算法的设计方法,如果存在冲突的情况下,时间复杂度可能会退化。极端情况下,哈希算法大量冲突,时间复杂度就退化为 O(n*m)。
3,BM算法
对于工业级的软件开发来说,我们希望算法尽可能的高效,并且在极端情况下,性能也不要退化的太严重。那么,对于查找功能是重要功能的软件来说,比如一些文本编辑器,它们的查找功能都是用哪种算法来实现的呢?有没有比 BF 算法和 RK 算法更加高效的字符串匹配算法呢?
BM(Boyer-Moore)算法。它是一种非常高效的字符串匹配算法,有实验统计,它的性能是著名的KMP 算法的 3 到 4 倍。
BM 算法核心思想是,利用模式串本身的特点,在模式串中某个字符与主串不能匹配的时候,将模式串往后多滑动几位,以此来减少不必要的字符比较,提高匹配的效率。BM 算法构建的规则有两类,坏字符规则和好后缀规则。好后缀规则可以独立于坏字符规则使用。因为坏字符规则的实现比较耗内存,为了节省内存,我们可以只用好后缀规则来实现 BM 算法。
(1)坏字符规则
BM 算法的匹配顺序比较特别,它是按照模式串下标从大到小的顺序,倒着匹配的。
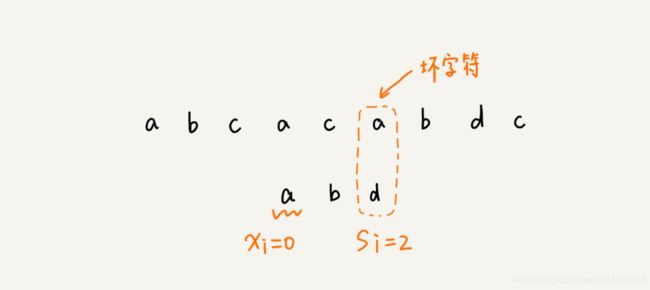
当发生不匹配的时候,我们把坏字符对应的模式串中的字符下标记作 si。如果坏字符在模式串中存在,我们把这个坏字符在模式串中的下标记作 xi。如果不存在,我们把 xi 记作 -1。那模式串往后移动的位数就等于 si-xi。(注意,我这里说的下标,都是字符在模式串的下标)。如果坏字符在模式串里多处出现,那我们在计算 xi 的时候,选择最靠后的那个,因为这样不会让模式串滑动过多,导致本来可能匹配的情况被滑动略过。
利用坏字符规则,BM 算法在最好情况下的时间复杂度非常低,是 O(n/m)。比如,主串是 aaabaaabaaabaaab,模式串是 aaaa。每次比对,模式串都可以直接后移四位,所以,匹配具有类似特点的模式串和主串的时候,BM 算法非常高效。
如果我们拿坏字符,在模式串中顺序遍历查找,这样就会比较低效,势必影响这个算法的性能。有没有更加高效的方式呢?我们之前学的散列表,这里可以派上用场了。我们可以将模式串中的每个字符及其下标都存到散列表中。这样就可以快速找到坏字符在模式串的位置下标了。关于这个散列表,我们只实现一种最简单的情况,假设字符串的字符集不是很大,每个字符长度是 1 字节,我们用大小为 256 的数组,来记录每个字符在模式串中出现的位置。数组的下标对应字符的 ASCII 码值,数组中存储这个字符在模式串中出现的位置。
如果将上面的过程翻译成代码,就是下面这个样子。其中,变量 b 是模式串,m 是模式串的长度,bc 表示刚刚讲的散列表。
private static final int SIZE = 256; // 全局变量或成员变量
private void generateBC(char[] b, int m, int[] bc) {
for (int i = 0; i < SIZE; ++i) {
bc[i] = -1; // 初始化bc
}
for (int i = 0; i < m; ++i) {
int ascii = (int)b[i]; // 计算b[i]的ASCII值
bc[ascii] = i;
}
}(2)好后缀规则
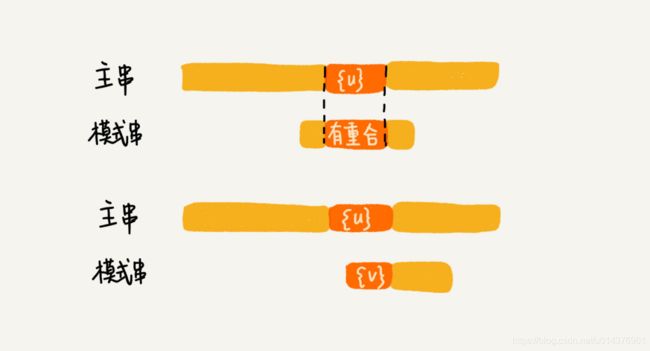
我们把已经匹配的 bc 叫作好后缀,记作{u}。我们拿它在模式串中查找,如果找到了另一个跟{u}相匹配的子串{u*},那我们就将模式串滑动到子串{u*}与主串中{u}对齐的位置。

但是当模式串滑动到前缀与主串中{u}的后缀有部分重合的时候,并且重合的部分相等的时候,就有可能会存在完全匹配的情况。针对这种情况,我们不仅要看好后缀在模式串中,是否有另一个匹配的子串,我们还要考察好后缀的后缀子串,是否存在跟模式串的前缀子串匹配的。
4,KMP算法
(1)KMP 算法基本原理
KMP 算法是根据三位作者(D.E.Knuth,J.H.Morris 和 V.R.Pratt)的名字来命名的,算法的全称是 Knuth Morris Pratt 算法,简称为 KMP 算法。KMP 算法的核心思想:
在模式串与主串匹配的过程中,当遇到不可匹配的字符的时候,我们希望找到一些规律,可以将模式串往后多滑动几位,跳过那些肯定不会匹配的情况。
在模式串和主串匹配的过程中,把不能匹配的那个字符仍然叫作坏字符,把已经匹配的那段字符串叫作好前缀。当遇到坏字符的时候,我们就要把模式串往后滑动,在滑动的过程中,只要模式串和好前缀有上下重合,前面几个字符的比较,就相当于拿好前缀的后缀子串,跟模式串的前缀子串在比较。这个比较的过程能否更高效了呢?可以不用一个字符一个字符地比较了吗?

我们只需要拿好前缀本身,在它的后缀子串中,查找最长的那个可以跟好前缀的前缀子串匹配的。假设最长的可匹配的那部分前缀子串是{v},长度是 k。我们把模式串一次性往后滑动 j-k 位,相当于,每次遇到坏字符的时候,我们就把 j 更新为 k,i 不变,然后继续比较。

如何来求好前缀的最长可匹配前缀和后缀子串呢?这个问题其实不涉及主串,只需要通过模式串本身就能求解。KMP 算法提前构建一个数组,用来存储模式串中每个前缀(这些前缀都有可能是好前缀)的最长可匹配前缀子串的结尾字符下标。我们把这个数组定义为 next 数组,很多书中还给这个数组起了一个名字,叫失效函数(failure function)。数组的下标是每个前缀结尾字符下标,数组的值是这个前缀的最长可以匹配前缀子串的结尾字符下标。

有了 next 数组,我们很容易就可以实现 KMP 算法了。我先假设 next 数组已经计算好了,先给出 KMP 算法的框架代码。
// a, b分别是主串和模式串;n, m分别是主串和模式串的长度。
public static int kmp(char[] a, int n, char[] b, int m) {
int[] next = getNexts(b, m);
int j = 0;
for (int i = 0; i < n; ++i) {
while (j > 0 && a[i] != b[j]) { // 如果遇到坏字符,从最长匹配前缀子串开始找,j回退,i不变,一直找到a[i]和b[j]
j = next[j - 1] + 1;
}
if (a[i] == b[j]) {
++j;
}
if (j == m) { // 找到匹配模式串的了
return i - m + 1;
}
}
return -1;
}(2)失效函数计算方法
我们按照下标从小到大,依次计算 next 数组的值。当我们要计算 next[i] 的时候,前面的 next[0],next[1],……,next[i-1] 应该已经计算出来了。利用已经计算出来的 next 值,我们是否可以快速推导出 next[i] 的值呢?
如果 next[i-1]=k-1,也就是说,子串 b[0, k-1] 是 b[0, i-1] 的最长可匹配前缀子串。如果子串 b[0, k-1] 的下一个字符 b[k],与 b[0, i-1] 的下一个字符 b[i] 匹配,那子串 b[0, k] 就是 b[0, i] 的最长可匹配前缀子串。所以,next[i] 等于 k。

如果b[0, i-1] 最长可匹配后缀子串对应的模式串的前缀子串的下一个字符并不等于 b[i],那么我们就可以考察 b[0, i-1] 的次长可匹配后缀子串 b[x, i-1] 对应的可匹配前缀子串 b[0, i-1-x] 的下一个字符 b[i-x] 是否等于 b[i]。如果等于,那 b[x, i] 就是 b[0, i] 的最长可匹配后缀子串。
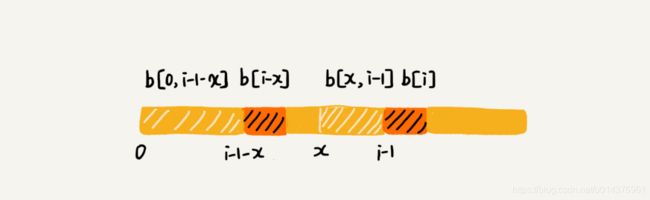
如何求得 b[0, i-1] 的次长可匹配后缀子串呢?次长可匹配后缀子串肯定被包含在最长可匹配后缀子串中,而最长可匹配后缀子串又对应最长可匹配前缀子串 b[0, y]。于是,查找 b[0, i-1] 的次长可匹配后缀子串,这个问题就变成,查找 b[0, y] 的最长匹配后缀子串的问题了。
// b表示模式串,m表示模式串的长度
private static int[] getNexts(char[] b, int m) {
int[] next = new int[m];
next[0] = -1;
int k = -1;
for (int i = 1; i < m; ++i) {
while (k != -1 && b[k + 1] != b[i]) {
k = next[k];
}
if (b[k + 1] == b[i]) {
++k;
}
next[i] = k;
}
return next;
}这里最难理解的地方是,k = next[k],因为前一个的最长串的下一个字符不与最后一个相等,需要找前一个的次长串,问题就变成了求0到next(k)的最长串,如果下个字符与最后一个不等,继续求次长串,也就是下一个next(k),直到找到,或者完全没有。
(3)KMP 算法复杂度分析
空间复杂度很容易分析,KMP 算法只需要一个额外的 next 数组,数组的大小跟模式串相同。所以空间复杂度是 O(m),m 表示模式串的长度。
KMP 算法包含两部分,第一部分是构建 next 数组,第二部分才是借助 next 数组匹配。所以,关于时间复杂度,我们要分别从这两部分来分析。
- 计算 next 数组的代码中,我们可以找一些参照变量,i 和 k。i 从 1 开始一直增加到 m,而 k 并不是每次 for 循环都会增加,所以,k 累积增加的值肯定小于 m。而 while 循环里 k=next[k],实际上是在减小 k 的值,k 累积都没有增加超过 m,所以 while 循环里面 k=next[k] 总的执行次数也不可能超过 m。因此,next 数组计算的时间复杂度是 O(m)。
- i 从 0 循环增长到 n-1,j 的增长量不可能超过 i,所以肯定小于 n。而 while 循环中的那条语句 j=next[j-1]+1,不会让 j 增长的,那有没有可能让 j 不变呢?也没有可能。因为 next[j-1] 的值肯定小于 j-1,所以 while 循环中的这条语句实际上也是在让 j 的值减少。而 j 总共增长的量都不会超过 n,那减少的量也不可能超过 n,所以 while 循环中的这条语句总的执行次数也不会超过 n,所以这部分的时间复杂度是 O(n)。
所以,综合两部分的时间复杂度,KMP 算法的时间复杂度就是 O(m+n)。
(4)总结
KMP 算法和上一节讲的 BM 算法的本质非常类似,都是根据规律在遇到坏字符的时候,把模式串往后多滑动几位。BM 算法有两个规则,坏字符和好后缀。KMP 算法借鉴 BM 算法的思想,可以总结成好前缀规则。这里面最难懂的就是 next 数组的计算。如果用最笨的方法来计算,确实不难,但是效率会比较低。所以,我讲了一种类似动态规划的方法,按照下标 i 从小到大,依次计算 next[i],并且 next[i] 的计算通过前面已经计算出来的 next[0],next[1],……,next[i-1] 来推导。
七,Trie树
Trie 树,也叫“字典树”。顾名思义,它是一个树形结构。它是一种专门处理字符串匹配的数据结构,用来解决在一组字符串集合中快速查找某个字符串的问题。Trie 树的本质,就是利用字符串之间的公共前缀,将重复的前缀合并在一起。
1,如何实现一棵 Trie 树?
Trie 树主要有两个操作,一个是将字符串集合构造成 Trie 树。这个过程分解开来的话,就是一个将字符串插入到 Trie 树的过程。另一个是在 Trie 树中查询一个字符串。
public class Trie {
private TrieNode root = new TrieNode('/'); // 存储无意义字符
// 往Trie树中插入一个字符串
public void insert(char[] text) {
TrieNode p = root;
for (int i = 0; i < text.length; ++i) {
int index = text[i] - 'a';
if (p.children[index] == null) {
TrieNode newNode = new TrieNode(text[i]);
p.children[index] = newNode;
}
p = p.children[index];
}
p.isEndingChar = true;
}
// 在Trie树中查找一个字符串
public boolean find(char[] pattern) {
TrieNode p = root;
for (int i = 0; i < pattern.length; ++i) {
int index = pattern[i] - 'a';
if (p.children[index] == null) {
return false; // 不存在pattern
}
p = p.children[index];
}
if (p.isEndingChar == false) return false; // 不能完全匹配,只是前缀
else return true; // 找到pattern
}
public class TrieNode {
public char data;
public TrieNode[] children = new TrieNode[26];
public boolean isEndingChar = false;
public TrieNode(char data) {
this.data = data;
}
}
}如果要在一组字符串中,频繁地查询某些字符串,用 Trie 树会非常高效。构建 Trie 树的过程,需要扫描所有的字符串,时间复杂度是 O(n)(n 表示所有字符串的长度和)。但是一旦构建成功之后,后续的查询操作会非常高效。
2,Trie 树很耗内存
Trie 树的本质是避免重复存储一组字符串的相同前缀子串,但是现在每个字符(对应一个节点)的存储远远大于 1 个字节。按照我们上面举的例子,数组长度为 26,每个元素是 8 字节,那每个节点就会额外需要 26*8=208 个字节。而且这还是只包含 26 个字符的情况。如果字符串中不仅包含小写字母,还包含大写字母、数字、甚至是中文,那需要的存储空间就更多了。所以,也就是说,在某些情况下,Trie 树不一定会节省存储空间。在重复的前缀并不多的情况下,Trie 树不但不能节省内存,还有可能会浪费更多的内存。当然,我们不可否认,Trie 树尽管有可能很浪费内存,但是确实非常高效。
实际上,Trie 树的变体有很多,都可以在一定程度上解决内存消耗的问题。比如,缩点优化,就是对只有一个子节点的节点,而且此节点不是一个串的结束节点,可以将此节点与子节点合并。这样可以节省空间,但却增加了编码难度。
3,Trie 树与散列表、红黑树的比较
在一组字符串中查找字符串,Trie 树实际上表现得并不好。它对要处理的字符串有及其严苛的要求。
- 第一,字符串中包含的字符集不能太大。我们前面讲到,如果字符集太大,那存储空间可能就会浪费很多。即便可以优化,但也要付出牺牲查询、插入效率的代价。
- 第二,要求字符串的前缀重合比较多,不然空间消耗会变大很多。
- 第三,如果要用 Trie 树解决问题,那我们就要自己从零开始实现一个 Trie 树,还要保证没有 bug,这个在工程上是将简单问题复杂化,除非必须,一般不建议这样做。
- 第四,我们知道,通过指针串起来的数据块是不连续的,而 Trie 树中用到了指针,所以,对缓存并不友好,性能上会打个折扣。
综合这几点,针对在一组字符串中查找字符串的问题,我们在工程中,更倾向于用散列表或者红黑树。因为这两种数据结构,我们都不需要自己去实现,直接利用编程语言中提供的现成类库就行了。
实际上,Trie 树只是不适合精确匹配查找,这种问题更适合用散列表或者红黑树来解决。Trie 树比较适合的是查找前缀匹配的字符串。
4,总结
如何利用 Trie 树,实现搜索关键词的提示功能?
我们假设关键词库由用户的热门搜索关键词组成。我们将这个词库构建成一个 Trie 树。当用户输入其中某个单词的时候,把这个词作为一个前缀子串在 Trie 树中匹配。为了讲解方便,我们假设词库里只有 hello、her、hi、how、so、see 这 6 个关键词。当用户输入了字母 h 的时候,我们就把以 h 为前缀的 hello、her、hi、how 展示在搜索提示框内。当用户继续键入字母 e 的时候,我们就把以 he 为前缀的 hello、her 展示在搜索提示框内。这就是搜索关键词提示的最基本的算法原理。
Trie 树是一种解决字符串快速匹配问题的数据结构。如果用来构建 Trie 树的这一组字符串中,前缀重复的情况不是很多,那 Trie 树这种数据结构总体上来讲是比较费内存的,是一种空间换时间的解决问题思路。尽管比较耗费内存,但是对内存不敏感或者内存消耗在接受范围内的情况下,在 Trie 树中做字符串匹配还是非常高效的,时间复杂度是 O(k),k 表示要匹配的字符串的长度。
但是,Trie 树的优势并不在于,用它来做动态集合数据的查找,因为,这个工作完全可以用更加合适的散列表或者红黑树来替代。Trie 树最有优势的是查找前缀匹配的字符串,比如搜索引擎中的关键词提示功能这个场景,就比较适合用它来解决,也是 Trie 树比较经典的应用场景。
八,AC自动机
1,基于单模式串和 Trie 树实现的敏感词过滤
BF 算法、RK 算法、BM 算法、KMP 算法,还有 Trie 树。前面四种算法都是单模式串匹配算法,只有 Trie 树是多模式串匹配算法。单模式串匹配算法,是在一个模式串和一个主串之间进行匹配,也就是说,在一个主串中查找一个模式串。多模式串匹配算法,就是在多个模式串和一个主串之间做匹配,也就是说,在一个主串中查找多个模式串。
尽管,单模式串匹配算法也能完成多模式串的匹配工作。例如开篇的思考题,我们可以针对每个敏感词,通过单模式串匹配算法(比如 KMP 算法)与用户输入的文字内容进行匹配。但是,这样做的话,每个匹配过程都需要扫描一遍用户输入的内容。整个过程下来就要扫描很多遍用户输入的内容。如果敏感词很多,比如几千个,并且用户输入的内容很长,假如有上千个字符,那我们就需要扫描几千遍这样的输入内容。很显然,这种处理思路比较低效。
与单模式匹配算法相比,多模式匹配算法在这个问题的处理上就很高效了。它只需要扫描一遍主串,就能在主串中一次性查找多个模式串是否存在,从而大大提高匹配效率。我们知道,Trie 树就是一种多模式串匹配算法。那如何用 Trie 树实现敏感词过滤功能呢?我们可以对敏感词字典进行预处理,构建成 Trie 树结构。这个预处理的操作只需要做一次,如果敏感词字典动态更新了,比如删除、添加了一个敏感词,那我们只需要动态更新一下 Trie 树就可以了。
当用户输入一个文本内容后,我们把用户输入的内容作为主串,从第一个字符(假设是字符 C)开始,在 Trie 树中匹配。当匹配到 Trie 树的叶子节点,或者中途遇到不匹配字符的时候,我们将主串的开始匹配位置后移一位,也就是从字符 C 的下一个字符开始,重新在 Trie 树中匹配。基于 Trie 树的这种处理方法,有点类似单模式串匹配的 BF 算法。我们知道,单模式串匹配算法中,KMP 算法对 BF 算法进行改进,引入了 next 数组,让匹配失败时,尽可能将模式串往后多滑动几位。借鉴单模式串的优化改进方法,能否对多模式串 Trie 树进行改进,进一步提高 Trie 树的效率呢?这就要用到 AC 自动机算法了。
2,经典的多模式串匹配算法:AC 自动机
AC 自动机算法,全称是 Aho-Corasick 算法。其实,Trie 树跟 AC 自动机之间的关系,就像单串匹配中朴素的串匹配算法,跟 KMP 算法之间的关系一样,只不过前者针对的是多模式串而已。所以,AC 自动机实际上就是在 Trie 树之上,加了类似 KMP 的 next 数组,只不过此处的 next 数组是构建在树上罢了。如果代码表示,就是下面这个样子:
public class AcNode {
public char data;
public AcNode[] children = new AcNode[26]; // 字符集只包含a~z这26个字符
public boolean isEndingChar = false; // 结尾字符为true
public int length = -1; // 当isEndingChar=true时,记录模式串长度
public AcNode fail; // 失败指针
public AcNode(char data) {
this.data = data;
}
}所以,AC 自动机的构建,包含两个操作:
- 将多个模式串构建成 Trie 树;
- 在 Trie 树上构建失败指针(相当于 KMP 中的失效函数 next 数组)。
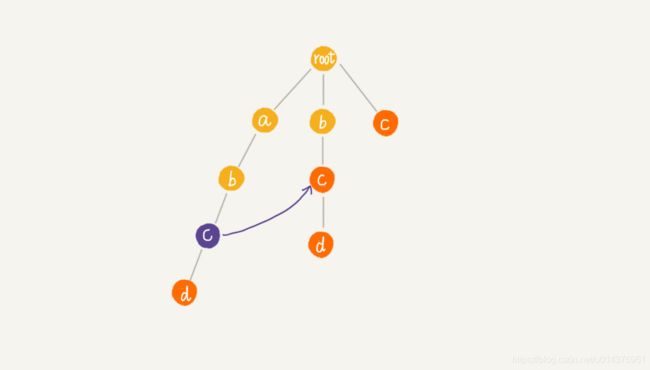
假设我们沿 Trie 树走到 p 节点,也就是下图中的紫色节点,那 p 的失败指针就是从 root 走到紫色节点形成的字符串 abc,跟所有模式串前缀匹配的最长可匹配后缀子串,就是箭头指的 bc 模式串。这里的最长可匹配后缀子串,我稍微解释一下。字符串 abc 的后缀子串有两个 bc,c,我们拿它们与其他模式串匹配,如果某个后缀子串可以匹配某个模式串的前缀,那我们就把这个后缀子串叫作可匹配后缀子串。我们从可匹配后缀子串中,找出最长的一个,就是刚刚讲到的最长可匹配后缀子串。我们将 p 节点的失败指针指向那个最长匹配后缀子串对应的模式串的前缀的最后一个节点,就是下图中箭头指向的节点。
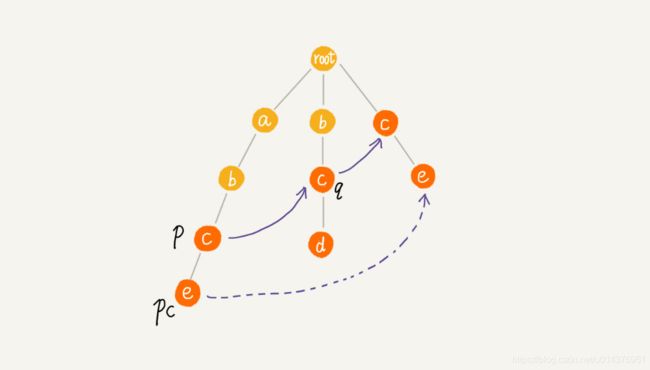
首先 root 的失败指针为 NULL,也就是指向自己。当我们已经求得某个节点 p 的失败指针之后,如何寻找它的子节点的失败指针呢?我们假设节点 p 的失败指针指向节点 q,我们看节点 p 的子节点 pc 对应的字符,是否也可以在节点 q 的子节点中找到。如果找到了节点 q 的一个子节点 qc,对应的字符跟节点 pc 对应的字符相同,则将节点 pc 的失败指针指向节点 qc。
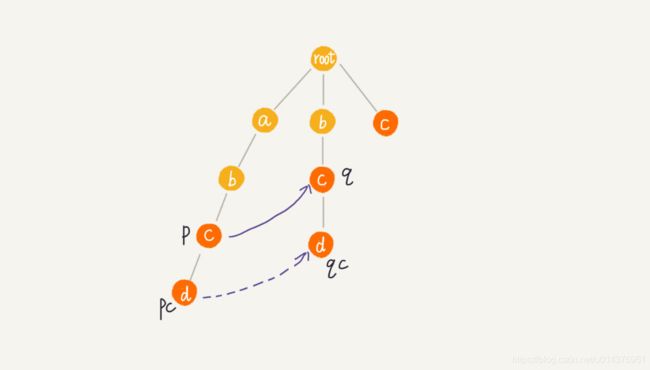
如果节点 q 中没有子节点的字符等于节点 pc 包含的字符,则令 q=q->fail(fail 表示失败指针,这里有没有很像 KMP 算法里求 next 的过程?),继续上面的查找,直到 q 是 root 为止,如果还没有找到相同字符的子节点,就让节点 pc 的失败指针指向 root。
public void buildFailurePointer() {
Queue queue = new LinkedList<>();
root.fail = null;
queue.add(root);
while (!queue.isEmpty()) {
AcNode p = queue.remove();
for (int i = 0; i < 26; ++i) {
AcNode pc = p.children[i];
if (pc == null) continue;
if (p == root) {
pc.fail = root;
} else {
AcNode q = p.fail;
while (q != null) {
AcNode qc = q.children[pc.data - 'a'];
if (qc != null) {
pc.fail = qc;
break;
}
q = q.fail;
}
if (q == null) {
pc.fail = root;
}
}
queue.add(pc);
}
}
} 通过按层来计算每个节点的子节点的失效指针,刚刚举的那个例子,最后构建完成之后的 AC 自动机就是下面这个样子:
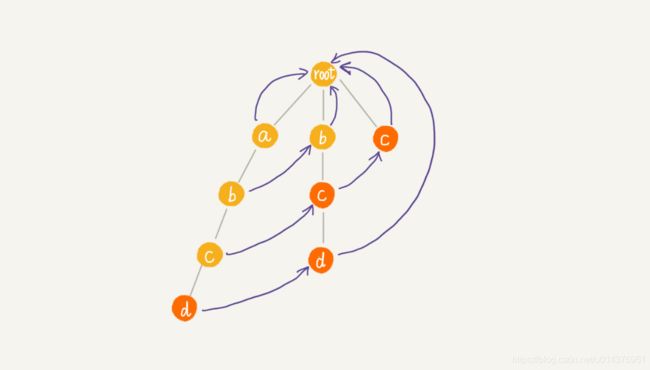
AC 自动机到此就构建完成了。我们现在来看下,如何在 AC 自动机上匹配主串?
关于匹配的这部分,文字描述不如代码看得清楚,所以我把代码贴了出来,非常简短,并且添加了详细的注释,你可以对照着看下。这段代码输出的就是,在主串中每个可以匹配的模式串出现的位置。
public void match(char[] text) { // text是主串
int n = text.length;
AcNode p = root;
for (int i = 0; i < n; ++i) {
int idx = text[i] - 'a';
while (p.children[idx] == null && p != root) {
p = p.fail; // 失败指针发挥作用的地方
}
p = p.children[idx];
if (p == null) p = root; // 如果没有匹配的,从root开始重新匹配
AcNode tmp = p;
while (tmp != root) { // 打印出可以匹配的模式串
if (tmp.isEndingChar == true) {
int pos = i-tmp.length+1;
System.out.println("匹配起始下标" + pos + "; 长度" + tmp.length);
}
tmp = tmp.fail;
}
}
}3,AC自动机的时间复杂度
AC 自动机实现的敏感词过滤系统,是否比单模式串匹配方法更高效呢?
首先,我们需要将敏感词构建成 AC 自动机,包括构建 Trie 树以及构建失败指针。我们上一节讲过,Trie 树构建的时间复杂度是 O(m*len),其中 len 表示敏感词的平均长度,m 表示敏感词的个数。那构建失败指针的时间复杂度是多少呢?
假设 Trie 树中总的节点个数是 k,每个节点构建失败指针的时候,(你可以看下代码)最耗时的环节是 while 循环中的 q=q->fail,每运行一次这个语句,q 指向节点的深度都会减少 1,而树的高度最高也不会超过 len,所以每个节点构建失败指针的时间复杂度是 O(len)。整个失败指针的构建过程就是 O(k*len)。
我们再来看下,用 AC 自动机做匹配的时间复杂度是多少?
跟刚刚构建失败指针的分析类似,for 循环依次遍历主串中的每个字符,for 循环内部最耗时的部分也是 while 循环,而这一部分的时间复杂度也是 O(len),所以总的匹配的时间复杂度就是 O(n*len)。因为敏感词并不会很长,而且这个时间复杂度只是一个非常宽泛的上限,实际情况下,可能近似于 O(n),所以 AC 自动机做敏感词过滤,性能非常高。
你可以会说,从时间复杂度上看,AC 自动机匹配的效率跟 Trie 树一样啊。实际上,因为失效指针可能大部分情况下都指向 root 节点,所以绝大部分情况下,在 AC 自动机上做匹配的效率要远高于刚刚计算出的比较宽泛的时间复杂度。只有在极端情况下,如图所示,AC 自动机的性能才会退化的跟 Trie 树一样。

九,贪心算法
1,使用贪心算法的例子
(1)分糖果
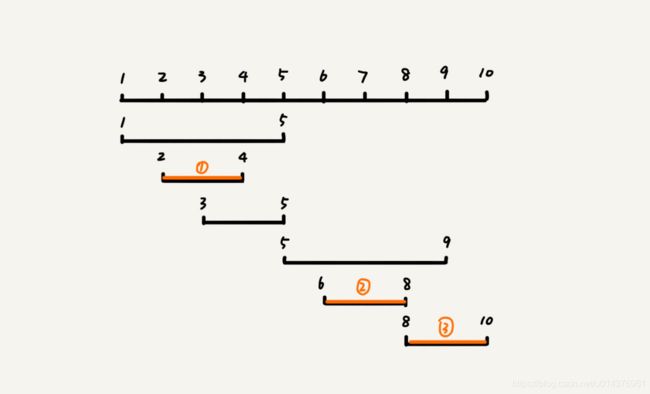
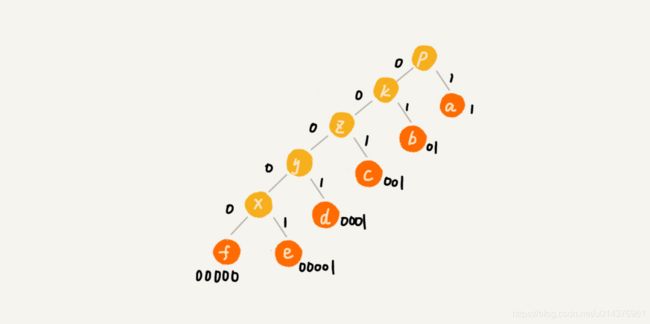
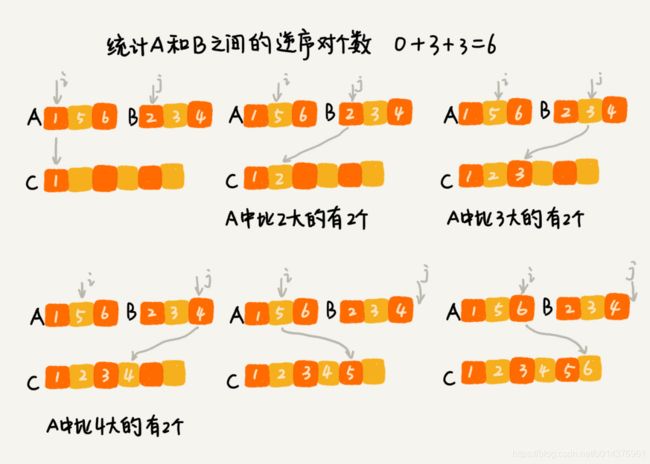
我们有 m 个糖果和 n 个孩子。我们现在要把糖果分给这些孩子吃,但是糖果少,孩子多(m 我们现在来看看如何用贪心算法来解决。对于一个孩子来说,如果小的糖果可以满足,我们就没必要用更大的糖果,这样更大的就可以留给其他对糖果大小需求更大的孩子。另一方面,对糖果大小需求小的孩子更容易被满足,所以,我们可以从需求小的孩子开始分配糖果。因为满足一个需求大的孩子跟满足一个需求小的孩子,对我们期望值的贡献是一样的。我们每次从剩下的孩子中,找出对糖果大小需求最小的,然后发给他剩下的糖果中能满足他的最小的糖果,这样得到的分配方案,也就是满足的孩子个数最多的方案。 假设我们有 n 个区间,区间的起始端点和结束端点分别是 [l1, r1],[l2, r2],[l3, r3],……,[ln, rn]。我们从这 n 个区间中选出一部分区间,这部分区间满足两两不相交(端点相交的情况不算相交),最多能选出多少个区间呢? 这个问题的解决思路是这样的:我们假设这 n 个区间中最左端点是 lmin,最右端点是 rmax。这个问题就相当于,我们选择几个不相交的区间,从左到右将 [lmin, rmax] 覆盖上。我们按照起始端点从小到大的顺序对这 n 个区间排序。我们每次选择的时候,左端点跟前面的已经覆盖的区间不重合的,右端点又尽量小的,这样可以让剩下的未覆盖区间尽可能的大,就可以放置更多的区间。这实际上就是一种贪心的选择方法。 假设我有一个包含 1000 个字符的文件,每个字符占 1 个 byte(1byte=8bits),存储这 1000 个字符就一共需要 8000bits,那有没有更加节省空间的存储方式呢? 假设我们通过统计分析发现,这 1000 个字符中只包含 6 种不同字符,假设它们分别是 a、b、c、d、e、f。而 3 个二进制位(bit)就可以表示 8 个不同的字符,所以,为了尽量减少存储空间,每个字符我们用 3 个二进制位来表示。那存储这 1000 个字符只需要 3000bits 就可以了,比原来的存储方式节省了很多空间。不过,还有没有更加节省空间的存储方式呢? 霍夫曼编码是一种十分有效的编码方法,广泛用于数据压缩中,其压缩率通常在 20%~90% 之间。霍夫曼编码不仅会考察文本中有多少个不同字符,还会考察每个字符出现的频率,根据频率的不同,选择不同长度的编码。霍夫曼编码试图用这种不等长的编码方法,来进一步增加压缩的效率。如何给不同频率的字符选择不同长度的编码呢?根据贪心的思想,我们可以把出现频率比较多的字符,用稍微短一些的编码;出现频率比较少的字符,用稍微长一些的编码。 假设这 6 个字符出现的频率从高到低依次是 a、b、c、d、e、f。我们把它们编码下面这个样子,任何一个字符的编码都不是另一个的前缀,在解压缩的时候,我们每次会读取尽可能长的可解压的二进制串,所以在解压缩的时候也不会歧义。经过这种编码压缩之后,这 1000 个字符只需要 2100bits 就可以了。 我们把每个字符看作一个节点,并且辅带着把频率放到优先级队列中。我们从队列中取出频率最小的两个节点 A、B,然后新建一个节点 C,把频率设置为两个节点的频率之和,并把这个新节点 C 作为节点 A、B 的父节点。最后再把 C 节点放入到优先级队列中。重复这个过程,直到队列中没有数据。 现在,我们给每一条边加上画一个权值,指向左子节点的边我们统统标记为 0,指向右子节点的边,我们统统标记为 1,那从根节点到叶节点的路径就是叶节点对应字符的霍夫曼编码。 即使有面值为一元的币值也不行:考虑币值为100,99和1的币种,每种各一百张,找396元。动态规划可求出四张99元,但贪心算法解出需三张一百和96张一元。 由最高位开始,比较低一位数字,如高位大,移除,若高位小,则向右移一位继续比较两个数字,直到高位大于低位则移除,循环k次,如: 分治算法(divide and conquer)的核心思想其实就是四个字,分而治之 ,也就是将原问题划分成 n 个规模较小,并且结构与原问题相似的子问题,递归地解决这些子问题,然后再合并其结果,就得到原问题的解。这个定义看起来有点类似递归的定义。关于分治和递归的区别,我们在排序(下)的时候讲过,分治算法是一种处理问题的思想,递归是一种编程技巧。实际上,分治算法一般都比较适合用递归来实现。分治算法的递归实现中,每一层递归都会涉及这样三个操作: 分治算法能解决的问题,一般需要满足下面这几个条件: 假设我们有 n 个数据,我们期望数据从小到大排列,那完全有序的数据的有序度就是 n(n-1)/2,逆序度等于 0;相反,倒序排列的数据的有序度就是 0,逆序度是 n(n-1)/2。除了这两种极端情况外,我们通过计算有序对或者逆序对的个数,来表示数据的有序度或逆序度。 我们用分治算法来试试。我们套用分治的思想来求数组 A 的逆序对个数。我们可以将数组分成前后两半 A1 和 A2,分别计算 A1 和 A2 的逆序对个数 K1 和 K2,然后再计算 A1 与 A2 之间的逆序对个数 K3。那数组 A 的逆序对个数就等于 K1+K2+K3。 我们前面讲过,使用分治算法其中一个要求是,子问题合并的代价不能太大,否则就起不了降低时间复杂度的效果了。那回到这个问题,如何快速计算出两个子问题 A1 与 A2 之间的逆序对个数呢? 这里就要借助归并排序算法了。 归并排序中有一个非常关键的操作,就是将两个有序的小数组,合并成一个有序的数组。实际上,在这个合并的过程中,我们就可以计算这两个小数组的逆序对个数了。每次合并操作,我们都计算逆序对个数,把这些计算出来的逆序对个数求和,就是这个数组的逆序对个数了。 比如,给 10GB 的订单文件按照金额排序这样一个需求,看似是一个简单的排序问题,但是因为数据量大,有 10GB,而我们的机器的内存可能只有 2、3GB 这样子,无法一次性加载到内存,也就无法通过单纯地使用快排、归并等基础算法来解决了。要解决这种数据量大到内存装不下的问题,我们就可以利用分治的思想。我们可以将海量的数据集合根据某种方法,划分为几个小的数据集合,每个小的数据集合单独加载到内存来解决,然后再将小数据集合合并成大数据集合。实际上,利用这种分治的处理思路,不仅仅能克服内存的限制,还能利用多线程或者多机处理,加快处理的速度。 比如刚刚举的那个例子,给 10GB 的订单排序,我们就可以先扫描一遍订单,根据订单的金额,将 10GB 的文件划分为几个金额区间。比如订单金额为 1 到 100 元的放到一个小文件,101 到 200 之间的放到另一个文件,以此类推。这样每个小文件都可以单独加载到内存排序,最后将这些有序的小文件合并,就是最终有序的 10GB 订单数据了。 我们有一个 8x8 的棋盘,希望往里放 8 个棋子(皇后),每个棋子所在的行、列、对角线都不能有另一个棋子。 我们把这个问题划分成 8 个阶段,依次将 8 个棋子放到第一行、第二行、第三行……第八行。在放置的过程中,我们不停地检查当前的方法,是否满足要求。如果满足,则跳到下一行继续放置棋子;如果不满足,那就再换一种方法,继续尝试。 我们有一个背包,背包总的承载重量是 Wkg。现在我们有 n 个物品,每个物品的重量不等,并且不可分割。我们现在期望选择几件物品,装载到背包中。在不超过背包所能装载重量的前提下,如何让背包中物品的总重量最大? 正则表达式中,最重要的就是通配符,通配符结合在一起,可以表达非常丰富的语义。为了方便讲解,我假设正则表达式中只包含“*”和“?”这两种通配符,并且对这两个通配符的语义稍微做些改变,其中,“*”匹配任意多个(大于等于 0 个)任意字符,“?”匹配零个或者一个任意字符。基于以上背景假设,我们看下,如何用回溯算法,判断一个给定的文本,能否跟给定的正则表达式匹配? 我们依次考察正则表达式中的每个字符,当是非通配符时,我们就直接跟文本的字符进行匹配,如果相同,则继续往下处理;如果不同,则回溯。如果遇到特殊字符的时候,我们就有多种处理方式了,也就是所谓的岔路口,比如“*”有多种匹配方案,可以匹配任意个文本串中的字符,我们就先随意的选择一种匹配方案,然后继续考察剩下的字符。如果中途发现无法继续匹配下去了,我们就回到这个岔路口,重新选择一种匹配方案,然后再继续匹配剩下的字符。 (2)区间覆盖
(3)霍夫曼编码
a(000)、b(001)、c(010)、d(011)、e(100)、f(101)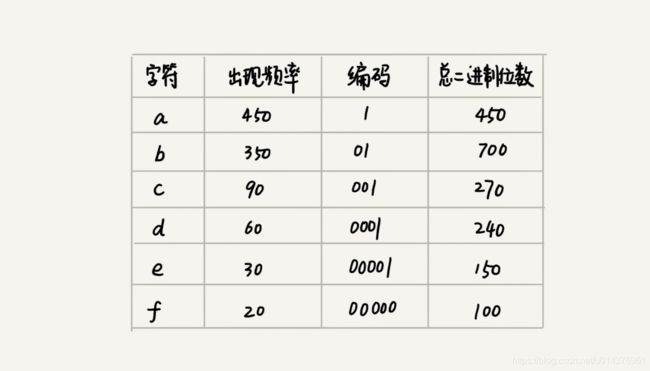

2,不能用贪心算法的例子
找零问题
3,思考题
在一个非负整数 a 中,我们希望从中移除 k 个数字,让剩下的数字值最小,如何选择移除哪 k 个数字呢?
4556847594546移除5位:455647594546-->45547594546-->4547594546-->4447594546-->444594546十,分治算法
1,分治算法应用举例分析

private int num = 0; // 全局变量或者成员变量
public int count(int[] a, int n) {
num = 0;
mergeSortCounting(a, 0, n-1);
return num;
}
private void mergeSortCounting(int[] a, int p, int r) {
if (p >= r) return;
int q = (p+r)/2;
mergeSortCounting(a, p, q);
mergeSortCounting(a, q+1, r);
merge(a, p, q, r);
}
private void merge(int[] a, int p, int q, int r) {
int i = p, j = q+1, k = 0;
int[] tmp = new int[r-p+1];
while (i<=q && j<=r) {
if (a[i] <= a[j]) {
tmp[k++] = a[i++];
} else {
num += (q-i+1); // 统计p-q之间,比a[j]大的元素个数
tmp[k++] = a[j++];
}
}
while (i <= q) { // 处理剩下的
tmp[k++] = a[i++];
}
while (j <= r) { // 处理剩下的
tmp[k++] = a[j++];
}
for (i = 0; i <= r-p; ++i) { // 从tmp拷贝回a
a[p+i] = tmp[i];
}
} 2,分治思想在海量数据处理中的应用
十一,回溯算法
1,八皇后问题
int[] result = new int[8];//全局或成员变量,下标表示行,值表示queen存储在哪一列
public void cal8queens(int row) { // 调用方式:cal8queens(0);
if (row == 8) { // 8个棋子都放置好了,打印结果
printQueens(result);
return; // 8行棋子都放好了,已经没法再往下递归了,所以就return
}
for (int column = 0; column < 8; ++column) { // 每一行都有8中放法
if (isOk(row, column)) { // 有些放法不满足要求
result[row] = column; // 第row行的棋子放到了column列
cal8queens(row+1); // 考察下一行
}
}
}
private boolean isOk(int row, int column) {//判断row行column列放置是否合适
int leftup = column - 1, rightup = column + 1;
for (int i = row-1; i >= 0; --i) { // 逐行往上考察每一行
if (result[i] == column) return false; // 第i行的column列有棋子吗?
if (leftup >= 0) { // 考察左上对角线:第i行leftup列有棋子吗?
if (result[i] == leftup) return false;
}
if (rightup < 8) { // 考察右上对角线:第i行rightup列有棋子吗?
if (result[i] == rightup) return false;
}
--leftup; ++rightup;
}
return true;
}
private void printQueens(int[] result) { // 打印出一个二维矩阵
for (int row = 0; row < 8; ++row) {
for (int column = 0; column < 8; ++column) {
if (result[row] == column) System.out.print("Q ");
else System.out.print("* ");
}
System.out.println();
}
System.out.println();
}2,0-1 背包
public int maxW = Integer.MIN_VALUE; //存储背包中物品总重量的最大值
// cw表示当前已经装进去的物品的重量和;i表示考察到哪个物品了;
// w背包重量;items表示每个物品的重量;n表示物品个数
// 假设背包可承受重量100,物品个数10,物品重量存储在数组a中,那可以这样调用函数:
// f(0, 0, a, 10, 100)
public void f(int i, int cw, int[] items, int n, int w) {
if (cw == w || i == n) { // cw==w表示装满了;i==n表示已经考察完所有的物品
if (cw > maxW) maxW = cw;
return;
}
f(i+1, cw, items, n, w);
if (cw + items[i] <= w) {// 已经超过可以背包承受的重量的时候,就不要再装了
f(i+1,cw + items[i], items, n, w);
}
}3. 正则表达式
public class Pattern {
private boolean matched = false;
private char[] pattern; // 正则表达式
private int plen; // 正则表达式长度
public Pattern(char[] pattern, int plen) {
this.pattern = pattern;
this.plen = plen;
}
public boolean match(char[] text, int tlen) { // 文本串及长度
matched = false;
rmatch(0, 0, text, tlen);
return matched;
}
private void rmatch(int ti, int pj, char[] text, int tlen) {
if (matched) return; // 如果已经匹配了,就不要继续递归了
if (pj == plen) { // 正则表达式到结尾了
if (ti == tlen) matched = true; // 文本串也到结尾了
return;
}
if (pattern[pj] == '*') { // *匹配任意个字符
for (int k = 0; k <= tlen-ti; ++k) {
rmatch(ti+k, pj+1, text, tlen);
}
} else if (pattern[pj] == '?') { // ?匹配0个或者1个字符
rmatch(ti, pj+1, text, tlen);
rmatch(ti+1, pj+1, text, tlen);
} else if (ti < tlen && pattern[pj] == text[ti]) { // 纯字符匹配才行
rmatch(ti+1, pj+1, text, tlen);
}
}
}