循环神经网络——中篇【深度学习】【PyTorch】【d2l】
文章目录
- 6、循环神经网络
-
- 6.4、循环神经网络(`RNN`)
-
- 6.4.1、理论部分
- 6.4.2、代码实现
- 6.5、长短期记忆网络(`LSTM`)
-
- 6.5.1、理论部分
- 6.5.2、代码实现
- 6.6、门控循环单元(`GRU`)
-
- 6.6.1、理论部分
- 6.6.2、代码实现
6、循环神经网络
6.4、循环神经网络(RNN)
6.4.1、理论部分
原理图
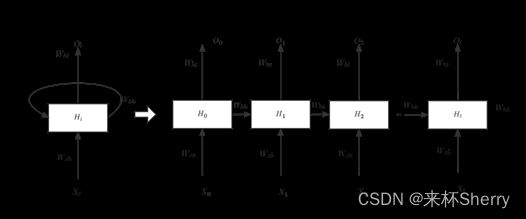
更新隐藏状态
H t = Φ ( W h h h t − 1 + W h x X t + b h ) H_t = Φ(W_{hh}h_{t-1}+W_{hx}X_t+b_h) Ht=Φ(Whhht−1+WhxXt+bh)
H t : H_t: Ht:当前隐层, X t : X_t: Xt:输入
W h h : W_{hh}: Whh:上层隐层分配到的权重
W h x : W_{hx}: Whx:输入分配到的权重
b:偏移
循环指的是什么?
隐状态使用的定义与前一个时间步中使用的定义相同, 因此 上式计算是循环的(recurrent)。 于是基于循环计算的隐状态神经网络被命名为 循环神经网络(recurrent neural network)。 在循环神经网络中执行如上计算的层 称为循环层(recurrent layer)。
输出
O t = Φ ( W h o H t + b o ) Ot = Φ(W_{ho}H_t+b_o) Ot=Φ(WhoHt+bo)
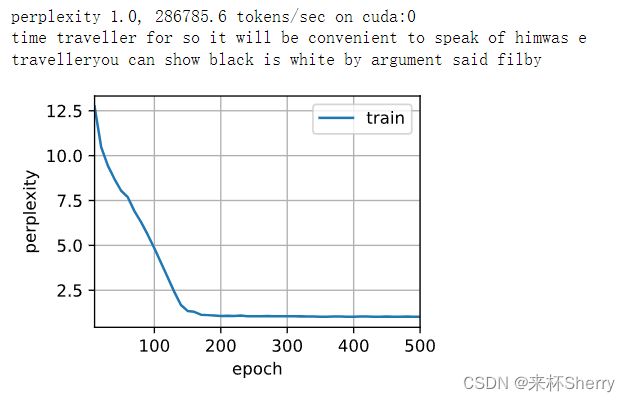
文本预测展示

困惑度
用来衡量一个语言模型好坏的标准,可以用平均交叉熵,如下:
Π = 1 n ∑ t = 1 n − l o g p ( x t ∣ x t − 1 , . . . x 1 ) Π = \frac{1}{n}\sum_{t=1}^n -log \ p(x_t|x_{t-1},...x_1) Π=n1t=1∑n−log p(xt∣xt−1,...x1)
其中,p为预测概率, x t x_t xt为真实词。
历史原因,NLP使用困惑度 e x p ( Π ) exp(Π) exp(Π)来衡量,是平均每次可能选项,1为完美,最差为∞。
梯度裁剪
用于抑制RNN梯度爆炸,如果梯度长度超过 Θ Θ Θ,那么 g g g长度将拖回 Θ Θ Θ,反之任由 g g g变化。
g ← m i n ( 1 , Θ ∣ ∣ g ∣ ∣ ) g g ← min(1,\frac{Θ}{||g||})g g←min(1,∣∣g∣∣Θ)g
6.4.2、代码实现
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
定义模型
num_hiddens = 256
rnn_layer = nn.RNN(len(vocab), num_hiddens)
隐状态:(隐藏层数,批量大小,隐藏单元数)
state = torch.zeros((1, batch_size, num_hiddens)) state.shapetorch.Size([1, 32, 256])
#@save
class RNNModel(nn.Module):
"""循环神经网络模型"""
def __init__(self, rnn_layer, vocab_size, **kwargs):
super(RNNModel, self).__init__(**kwargs)
self.rnn = rnn_layer
self.vocab_size = vocab_size
self.num_hiddens = self.rnn.hidden_size
# 如果RNN是双向的(之后将介绍),num_directions应该是2,否则应该是1
if not self.rnn.bidirectional:
self.num_directions = 1
self.linear = nn.Linear(self.num_hiddens, self.vocab_size)
else:
self.num_directions = 2
self.linear = nn.Linear(self.num_hiddens * 2, self.vocab_size)
def forward(self, inputs, state):
X = F.one_hot(inputs.T.long(), self.vocab_size)
X = X.to(torch.float32)
Y, state = self.rnn(X, state)
# 全连接层首先将Y的形状改为(时间步数*批量大小,隐藏单元数)
# 它的输出形状是(时间步数*批量大小,词表大小)。
output = self.linear(Y.reshape((-1, Y.shape[-1])))
return output, state
def begin_state(self, device, batch_size=1):
if not isinstance(self.rnn, nn.LSTM):
# nn.GRU以张量作为隐状态
return torch.zeros((self.num_directions * self.rnn.num_layers,
batch_size, self.num_hiddens),
device=device)
else:
# nn.LSTM以元组作为隐状态
return (torch.zeros((
self.num_directions * self.rnn.num_layers,
batch_size, self.num_hiddens), device=device),
torch.zeros((
self.num_directions * self.rnn.num_layers,
batch_size, self.num_hiddens), device=device))
训练&预测
这里是,随即权重预测(效果不好)
device = d2l.try_gpu()
net = RNNModel(rnn_layer, vocab_size=len(vocab))
net = net.to(device)
d2l.predict_ch8('time traveller', 10, net, vocab, device)
'time travellermkkkkkkkkk'
高级API训练预测
num_epochs, lr = 500, 1
d2l.train_ch8(net, train_iter, vocab, lr, num_epochs, device)
调试报错,未解决
6.5、长短期记忆网络(LSTM)
6.5.1、理论部分
原理图
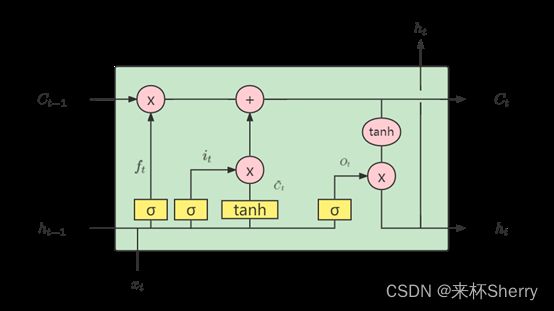
遗忘门
将值朝0减少。
F t = σ ( X t W x f + H t − 1 W h f + b f ) F_t = σ(X_tW_{xf} + H_{t-1}W_{hf}+b_f) Ft=σ(XtWxf+Ht−1Whf+bf)
输入门
决定是否忽略输入数据。
I t = σ ( X t W x i + H t − 1 W h i + b i ) I_t = σ(X_tW_{xi} + H_{t-1}W_{hi}+b_i) It=σ(XtWxi+Ht−1Whi+bi)
输出门
决定是否使用隐状态。
O t = σ ( X t W x o + H t − 1 W h o + b o ) O_t = σ(X_tW_{xo} + H_{t-1}W_{ho}+b_o) Ot=σ(XtWxo+Ht−1Who+bo)
候选记忆单元
C ~ = t a n h ( X t W x c + H t − 1 W h c + b c ) \tilde{C} = tanh(X_tW_{xc}+H_{t-1}W_{hc}+b_c) C~=tanh(XtWxc+Ht−1Whc+bc)
记忆单元
C t = F t ⊚ C t − 1 + I t ⊚ C ~ t C_t = F_t ⊚ C_{t-1}+I_t ⊚ \tilde{C}_t Ct=Ft⊚Ct−1+It⊚C~t
隐状态
H t = O t ⊚ t a n h ( C ~ ) H_t = O_t ⊚ tanh(\tilde{C}) Ht=Ot⊚tanh(C~)
6.5.2、代码实现
1)手写实现
import torch
from torch import nn
from d2l import torch as d2l
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
初始化模型参数
def get_lstm_params(vocab_size, num_hiddens, device):
num_inputs = num_outputs = vocab_size
def normal(shape):
return torch.randn(size=shape, device=device)*0.01
def three():
return (normal((num_inputs, num_hiddens)),
normal((num_hiddens, num_hiddens)),
torch.zeros(num_hiddens, device=device))
W_xi, W_hi, b_i = three() # 输入门参数
W_xf, W_hf, b_f = three() # 遗忘门参数
W_xo, W_ho, b_o = three() # 输出门参数
W_xc, W_hc, b_c = three() # 候选记忆元参数
# 输出层参数
W_hq = normal((num_hiddens, num_outputs))
b_q = torch.zeros(num_outputs, device=device)
# 附加梯度
params = [W_xi, W_hi, b_i, W_xf, W_hf, b_f, W_xo, W_ho, b_o, W_xc, W_hc,
b_c, W_hq, b_q]
for param in params:
param.requires_grad_(True)
return params
定义模型
def init_lstm_state(batch_size, num_hiddens, device):
return (torch.zeros((batch_size, num_hiddens), device=device),
torch.zeros((batch_size, num_hiddens), device=device))
def lstm(inputs, state, params):
[W_xi, W_hi, b_i, W_xf, W_hf, b_f, W_xo, W_ho, b_o, W_xc, W_hc, b_c,
W_hq, b_q] = params
(H, C) = state
outputs = []
for X in inputs:
I = torch.sigmoid((X @ W_xi) + (H @ W_hi) + b_i)
F = torch.sigmoid((X @ W_xf) + (H @ W_hf) + b_f)
O = torch.sigmoid((X @ W_xo) + (H @ W_ho) + b_o)
C_tilda = torch.tanh((X @ W_xc) + (H @ W_hc) + b_c)
C = F * C + I * C_tilda
H = O * torch.tanh(C)
Y = (H @ W_hq) + b_q
outputs.append(Y)
return torch.cat(outputs, dim=0), (H, C)
训练&预测
vocab_size, num_hiddens, device = len(vocab), 256, d2l.try_gpu()
num_epochs, lr = 500, 1
model = d2l.RNNModelScratch(len(vocab), num_hiddens, device, get_lstm_params,
init_lstm_state, lstm)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
2)简洁实现
num_inputs = vocab_size
lstm_layer = nn.LSTM(num_inputs, num_hiddens)
model = d2l.RNNModel(lstm_layer, len(vocab))
model = model.to(device)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
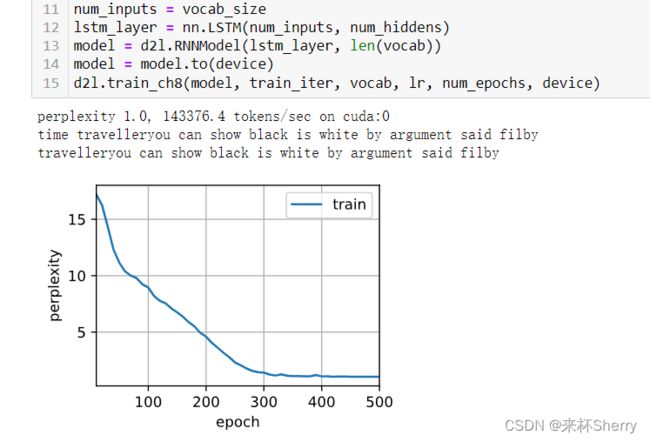
测试中,比手写实现快,甚至更准的原因?
深度学习框架的高级API对代码进行了更多的优化, 该模型在较短的时间内达到了较低的困惑度。
6.6、门控循环单元(GRU)
6.6.1、理论部分
直白理解:不是每个观察都重要,更新门实现关注机制,重置门实现遗忘机制。
原理图

重置门
R t = σ ( X t W x r + H t − 1 W h r + b r ) R_t =σ(X_{tW}x_r+H_{t-1}W_{hr}+b_r) Rt=σ(XtWxr+Ht−1Whr+br)
更新门
Z t = σ ( X t W x z + H t − 1 W h z + b z ) Z_t =σ(X_tW_{xz}+H_{t-1}W_{hz}+b_z) Zt=σ(XtWxz+Ht−1Whz+bz)
候选隐状态
H ~ t = t a n h ( X t W x h + ( R t ⊚ H t − 1 ) W h h + b h ) \tilde{H}_t = tanh(X_tW_{xh}+(R_t ⊚ H_{t-1})W_{hh}+b_h) H~t=tanh(XtWxh+(Rt⊚Ht−1)Whh+bh)
隐状态
H t = Z t ⊚ H t − 1 + ( 1 − Z t ) ⊚ H ~ t H_t = Z_t ⊚ H_{t-1}+(1-Z_t)⊚\tilde{H}_t Ht=Zt⊚Ht−1+(1−Zt)⊚H~t
6.6.2、代码实现
1)手写实现
import torch
from torch import nn
from d2l import torch as d2l
batch_size, num_steps = 32, 35
train_iter, vocab = d2l.load_data_time_machine(batch_size, num_steps)
初始化模型参数
def get_params(vocab_size, num_hiddens, device):
num_inputs = num_outputs = vocab_size
def normal(shape):
return torch.randn(size=shape, device=device)*0.01
def three():
return (normal((num_inputs, num_hiddens)),
normal((num_hiddens, num_hiddens)),
torch.zeros(num_hiddens, device=device))
W_xz, W_hz, b_z = three() # 更新门参数
W_xr, W_hr, b_r = three() # 重置门参数
W_xh, W_hh, b_h = three() # 候选隐状态参数
# 输出层参数
W_hq = normal((num_hiddens, num_outputs))
b_q = torch.zeros(num_outputs, device=device)
# 附加梯度
params = [W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q]
for param in params:
param.requires_grad_(True)
return params
定义模型
def init_gru_state(batch_size, num_hiddens, device):
return (torch.zeros((batch_size, num_hiddens), device=device), )
def gru(inputs, state, params):
W_xz, W_hz, b_z, W_xr, W_hr, b_r, W_xh, W_hh, b_h, W_hq, b_q = params
H, = state
outputs = []
for X in inputs:
Z = torch.sigmoid((X @ W_xz) + (H @ W_hz) + b_z)
R = torch.sigmoid((X @ W_xr) + (H @ W_hr) + b_r)
H_tilda = torch.tanh((X @ W_xh) + ((R * H) @ W_hh) + b_h)
H = Z * H + (1 - Z) * H_tilda
Y = H @ W_hq + b_q
outputs.append(Y)
return torch.cat(outputs, dim=0), (H,)
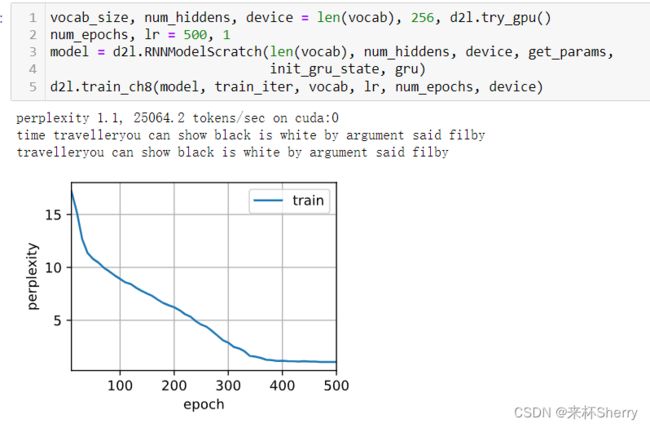
训练&预测
vocab_size, num_hiddens, device = len(vocab), 256, d2l.try_gpu()
num_epochs, lr = 500, 1
model = d2l.RNNModelScratch(len(vocab), num_hiddens, device, get_params,
init_gru_state, gru)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)

2)简洁实现
num_inputs = vocab_size
gru_layer = nn.GRU(num_inputs, num_hiddens)
model = d2l.RNNModel(gru_layer, len(vocab))
model = model.to(device)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)