法规标准-ISO 17386标准解读(2010版)
ISO 17386是做什么的?
ISO 17386全名为交通信息和控制系统-低速运行操纵辅助装置(MALSO)性能要求和试验程序,其中主要描述了低速运行操纵辅助装置的功能要求及试验方法
类别
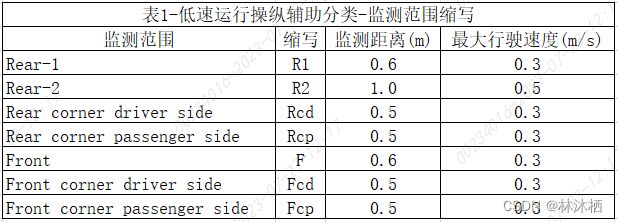
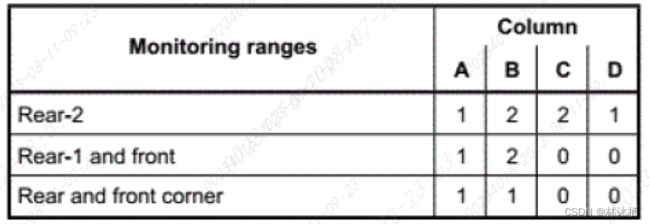
低速运行操纵辅助装置根据其覆盖不同监测范围的能力进行分类。每个监测范围对应于车辆边界的特定部分,以防止与障碍物碰撞,如图所示:
注:
1.如果有利于系统的预期用途,则可以使用任意监测范围的组合
2.角型系统的监测范围仅限于车辆的特定角,主要用于在狭窄通道中驾驶时为驾驶员提供帮助
3.为了方便和有效的使用操纵辅助装置,应根据上述分类告知驾驶员车辆配备的系统类型
功能及性能要求
系统激活
手动激活的系统
1.该系统由驾驶员通过开关或按钮打开和关闭。激活后,系统可以通过声音或视觉指示服务准备就绪。该指示应与障碍物的距离信息清楚区分
自动激活的系统
1.系统根据驾驶情况自动启用/停用。每个监测范围可以单独激活,以避免干扰信号。自动激活后,可以向驾驶员指示服务准备就绪。可以有一个开关或按钮来超越自动激活/关闭
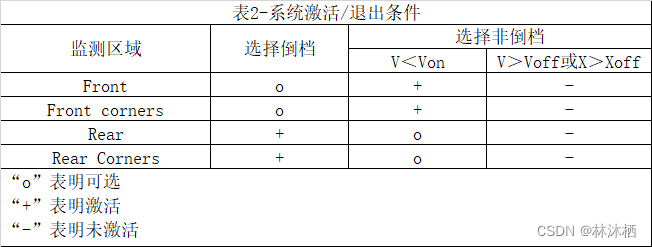
2.激活条件一是选择倒车挡,另一是低于指定限制的速度。停用条件可以是选择了倒车挡以外的挡位、速度超过指定限制速度Voff或自上次系统激活以来移动的距离大于Xoff
3.速度限制Von和Voff以及距离限制Xoff可以根据传感器技术及预期用途进行适当定义;但Von和Voff应为0.5m/s或0.3m/s,取决于监测范围,因为这是系统支持的最大速度
4.在配有MALSO系统的车辆上,挂入P挡或拉起EPB可能会退出系统
驾驶员界面和信息策略
对于驾驶员交互,至少应使用听觉信息通道。视觉信息和警告可作为补充。对于驾驶员来讲,最重要的信息是车辆边界和障碍物之间的距离,即间隙。障碍物相对于车辆的位置可以作为附加信息;此外,故障也应向驾驶员指示
声音信息
建议对声音信息通道使用以下基本代码:
a)距离应至少分为两个等级。这些区域可以用不同的重复率来表示,基本规则是高重复率或连续的声音对应于短距离。如果使用不同或附加的代码,则不应干扰基本规则
b)不同的区域可以用不同的载波频率来表示(例如,车辆前部的高频、车辆后部的低频),在这种情况下,应使用不超过两个不同的区域/载波频率,也可以使用合成或录制的语音信息
c)系统的激活/停用以及故障/干扰的指示可以用到声音信号呈现,与其它信号明显区分
视觉信息
如果视觉信息通道作为声音通道的补充,则建议使用以下基本代码:
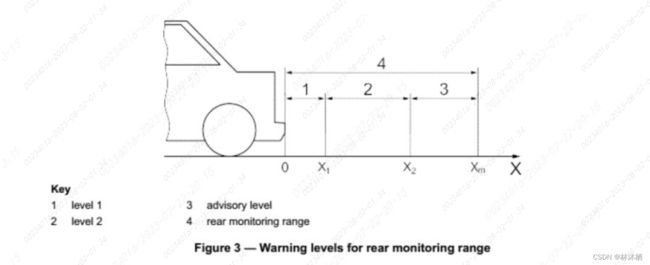
a)信息应至少分为两个级别,用多种颜色表示;例如,红色表示级别1(即将发生碰撞前夕),黄色和绿色表示级别2(注意力级别)。如果使用不同的代码或附加的规避等级,则不应干扰这些基本代码元素。两个级别可以通过使用一个以上具有相同颜色的显示元件来细分,例如,具有三个红色和三个黄色条的条形图,允许六个子级别。如果使用单色元素而不是多种颜色,则这两个级别可以通过连续和闪烁照明的组合来表示,或由递增条组成的显示
b)显示器的位置应尽量减少诱导驾驶员改变视线方向的可能。例如,建议将后部监测范围的显示器放置于乘客舱的后部,因为这样驾驶员可以观看显示器的同时通过后视镜或直接从后窗越过肩膀观看。出于同样的原因,建议在仪表盘中找到前监测范围的显示器
c)建议通过系统所有激活显示中的一个指示灯或符号装置来指示系统的激活/停用和故障。
视觉和听觉信息的组合
1.考虑到两种信息通道的特定优势,视觉和听觉信息的组合可用于提高系统性能或减少打扰驾驶员和乘客的可能
2.一级(即将发生碰撞级别)信息应通过听觉给出并且可以附加额外的视觉信息;二级(注意力级别)信息只能通过视觉或声音通道给出
3.如果驾驶员可以降低声音信息显示的强度,例如,从车载人机界面(HMI)系统的菜单中,则用户手册中应该有一条注释;或者在与HMI的系统的对话框中有一条消息,说明如果音量设置过低,可能无法及时感知警告
信号持续时间
1.一般来讲,只要检测到障碍物,就应保持障碍物的信号,当不再检测到障碍物或系统停用时,应停止发出信号
2.为了减少驾驶员的烦恼,系统可以在一定时间后(由制造商定义)自动暂时关闭声音信号,但是,系统应保持激活状态
3.一旦与障碍物的距离减小,声音信号应再次自动打开。在与障碍物距离增加的情况下,声音信号可以保持关闭状态
4.如果视觉显示补充了声音信息通道,则系统可以自动暂时关闭声音信号,但是需要保持视觉信号
5.驾驶员可以手动选择暂时抑制声音信号。在这种情况下,声音信号应保持抑制状态,直到驾驶员再次打开为止;但是,当系统下次激活时,声音信号应自动恢复
动态目标检测性能
物体的相对速度
当车辆本身静止或以0.3m/s的速度移动时,该系统应能检测静止物体。R2类系统应能在以高达0.5m/s的速度移动时检测到Rear-2检测范围内的静止物体
启动检测延迟
1.启动检测延迟定义为MALSO系统激活与MALSO系统向驾驶员提供有关监控范围内障碍物的正确信息之间的时间检测
2.如果MALSO系统没有提供服务准备指示,则从点火开关设置为ON且发动机运转的那一刻起测量启动检测延迟
3.启动检测延迟不得超过1.5s,确定系统运行以及完成内部系统和传感器测试所需的时间包含在内
4.如果MALSO系统提供声音或视觉或两者兼有的服务就绪指示,则从服务就绪指示结束的那一刻起测量启动检测延迟。平均启动检测延迟不得超过600ms,这允许在服务准备就绪音和MALSO声音提示之间有一段时间的静音;如果使用其他车辆系统(如导航显示器)来显示MALSO信息,则显示系统上的启动屏幕将被视为MALSO服务就绪指示
检测延迟
1.只要系统处于激活状态,在所有监测范围内,相关障碍物出现与向驾驶员提供正确信息之间的时间延迟不得超过500ms
2.延迟计算至少为10次测试的算术平均值,这些测试中指示的平均延迟不得超过500ms,单个值不得超过600ms
监测范围覆盖
后部水平区域
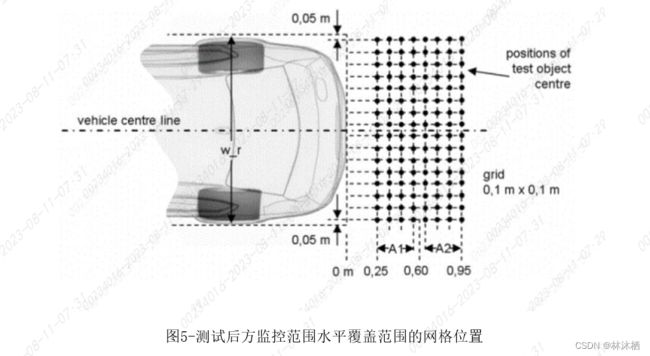
1.后部水平区域由一个矩形表示,该矩形从车辆后部边界0.2m处开始,一直延伸到最大检测距离,R1为0.6m,R2为1.0m;
2.矩形的宽度w_r等于沿后轴测量的车辆宽度,尺寸应四舍五入至最近的0.1m;
3.该矩形内测试对象H中心的网格位置如图所示,格栅与车辆中心线对称布置
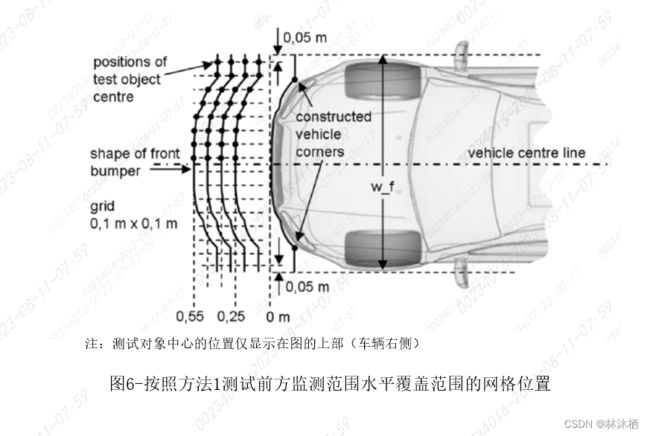
前水平区域
1.前部水平区域由一个区域表示,该区域从车辆前方边界0.2m处开始,延伸到最大检测距离,即0.6m;
2.该区域的宽度w_f等于沿前轴测量的车辆宽度,尺寸应四舍五入至0.1m;
3.与仅为矩形的后部水平区域不同,前部水平区域的测试网格位置位于遵循前保险杠轮廓的区域上,前保险杠在许多车辆上具有明显得凸起形状,有两种不同的方法来构建测试网格,在这两种方法中,格栅都与车辆中心线对称布置
方法一
垂直于行驶方向的距离线被一条遵循前保险杠形状的曲线所取代。曲线在行驶方向上平行位移0.1米的倍数。通过使用该曲线而不是直线,行驶方向上到障碍物的距离总是指车辆表面,即使在前保险杠非常圆或箭头形状的情况下也是如此。曲线遵循两个已构造的车辆拐角之间的前保险杠形状(地面上的垂直投影,如图6所示)。拐角的构造见图7。拐角的左侧和右侧,曲线由垂直于行驶方向的直线段完成,以覆盖整个车辆的宽度w_f
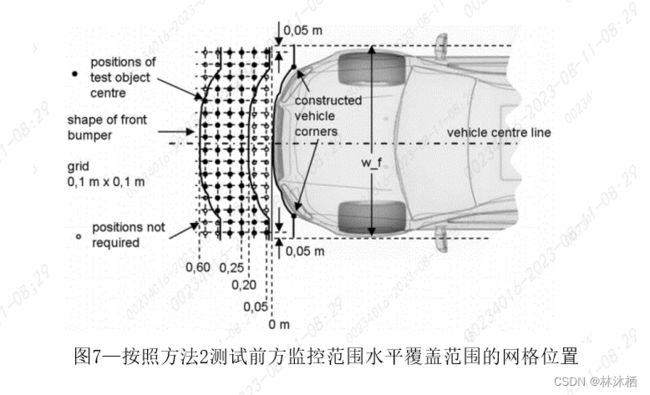
方法二
下面的网格仍然是矩形的,类似于后面的水平区域。然而,测试的格栅位置是由两条曲线从矩形中截取的,这两条曲线遵循前保险杠的形状(地面上的垂直投影,如图7所示),位于两个构造的车辆拐角之间。角的构造见图8。在拐角的左右两侧,曲线由垂直于行驶方向的直线段组成,以覆盖整个车辆宽度w _ f
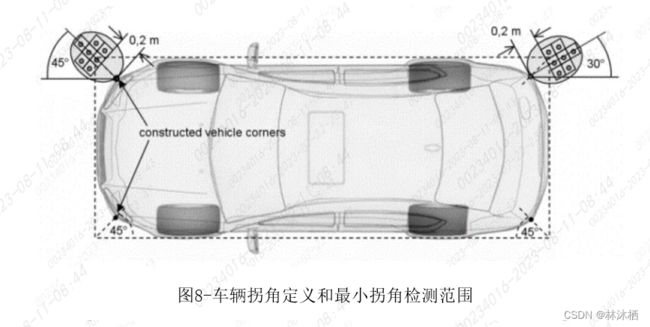
拐角水平区域
对于拐角水平区域的定义,应使用以下定义:
1.在车辆轮廓周围画个矩形框
2.从每个框角到车辆以45度划线
3.这些线与车辆边界的交点为车辆拐角
4.每个角的椭圆形区域表示在试验过程中使用七个方形网格位置(dx=dy=0.1m)评估的相关水平区域,其中心对应于标准试验目标的纵轴位置
5.对于前角和后角,椭圆相对于直线向前和向后的倾斜角度分别为30°和45°
最低水平覆盖率
前后水平相关区域的最低覆盖率要求如下:
1.A1区域为90%
2.A2区域为87%
3.拐角区域为100%
垂直区域
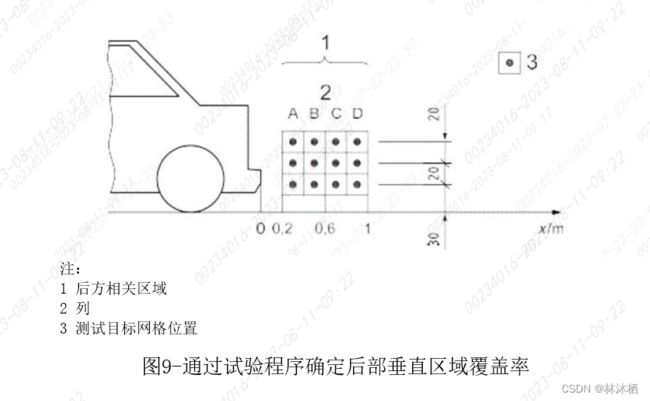
1.为了测试垂直覆盖范围,使用0.2m的网格(dx=dy=0.2m)就足够了,因为水平区域的测试已经证明了覆盖整个区域而不产生过多孔洞的能力。矩形的高度为0.6m,对应于3行网格正方形,其中心对应于标准测试目标的纵轴位置
2.后部监控范围示例如图所示
3.最低线的中心应高于地面0.3m
最小垂直覆盖范围
自检能力和故障指示
1.系统应提供以下自检能力【至少在每次系统激活后】:
a)电子电路和布线:自检单元应检查系统电子部件的功能
b)传感器组件:自检单元应检查传感器元件是否有任何损坏,从而导致系统故障
2.每当检测到故障情况时,生成警告信号
拖车操作
牵引挂接装置处理
1.安装在主车辆上的拖车挂接装置,一方面可能影响传感器的正常工作,另一方面可能会延伸车辆的后边界
2.特别是如果使用可拆卸式拖车挂接装置,应也别注意挂接装置的安装不会导致后部监控范围覆盖不良
3.如果安装了挂接装置后无法正常工作,则挂接装置安装时系统应自动关闭,或者驾驶员应能手动停用系统。车辆的用户手册应描述在这些情况下的适当操作。
带拖车的系统操作
1.对于无法手动停用的系统,车辆电路的设计应确保一旦牵引车和尾随车之间的电气连接处于运行状态,倒车检测系统就会自动暂停。但是,如果拖车安装了兼容传感器,这些传感器现在应该在倒车时通知驾驶员障碍物
试验程序
试验目标
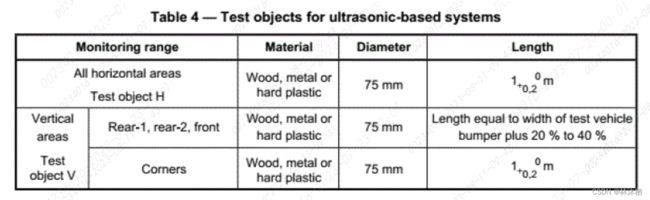
基于超声波的系统
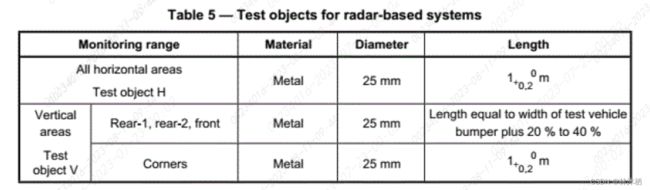
基于雷达的系统
水平区域的覆盖率测试
试验方法
参考【监测范围覆盖-水平区域】
通过标准
参考【最低水平覆盖率】
垂直区域的覆盖范围测试
试验方法
参考【监测范围覆盖-垂直区域】
通过标准
参考【最低垂直覆盖范围】
系统反应时间测试
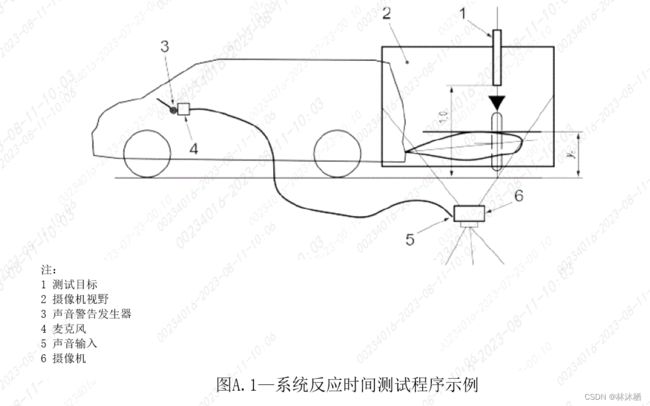
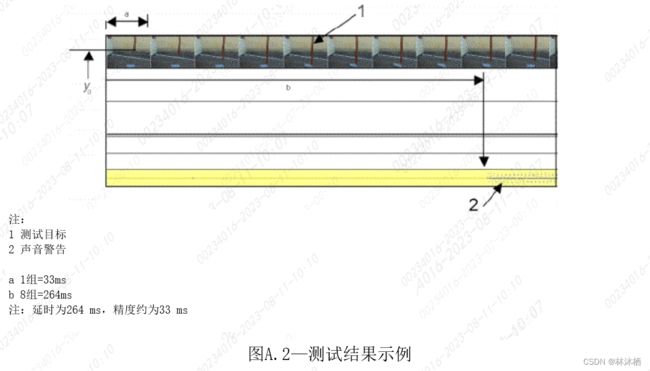
1.准备一台摄像机
2.将用于收集声音警告信息的麦克风的输出信号输入到摄像机的声音接口
3.摄像机是固定的,用于记录测试目标从合理高度落入监控范围的视频。试验目标到车辆边界的距离应相当于各自监测范围内样品最大检测距离的约80%,在拐角监测范围内,近似测试目标距离为0.4m,在F和R1为0.5m,在R2中为0.8m。如果车辆或系统制造商规定R2的最大监测距离大于1.2m,则在这种测试情况下,测试目标应位于1.0m的距离处,选择准确的位置,以便测试目标在掉落后能够内无故障的检测到
4.打开摄像机电源并开始录制
5.非常缓慢地将测试目标降低至监测区域。当系统开始发出警告时,将目标停止在位置Y0,用摄像机记录这个位置
6.将目标从合理高度(例如1.0m)跌落到监控区域,并用摄像机记录测试目标的移动和声音警告
7.系统反应时间等于从目标通过点Y0到警告开始所经过的时间