Matlab的filtfilt函数解析
目录
0.前言
1.filtfilt函数的解析
1.1 主要流程
1.2 边界的延拓
1.3 边界效应的优化
1.4 滤波器系数获取
2.C++实现及对比
2.1 C++实现
滤波结果对比
参考文献
补充 Zi 计算
0.前言
传统滤波(如Matlab的filter函数)会造成信号的延迟,延迟程度与滤波器的阶次有关,为了解决延迟问题,Matlab提供了filtfilt函数,该方法一般称为零相位滤波或双向滤波。
本文的目的是对Matlab中的filtfilt函数原理进行解析,并在C++中实现。
1.filtfilt函数的解析
参考Matlab中的filter函数和filtfilt函数,对零相位滤波原理进行解析。
1.1 主要流程
零相位滤波的主要流程如下:

1.2 边界的延拓
为了改善边界效应,对原始信号数据进行延拓,即在首尾处增加数据点。
对于N阶的滤波器,单边延拓的数据长度为nfact =3* N。
延拓数据的计算方式如下:

1.3 边界效应的优化
滤波可以通过差分的方式实现,网上很多资料给出的计算公式如下:
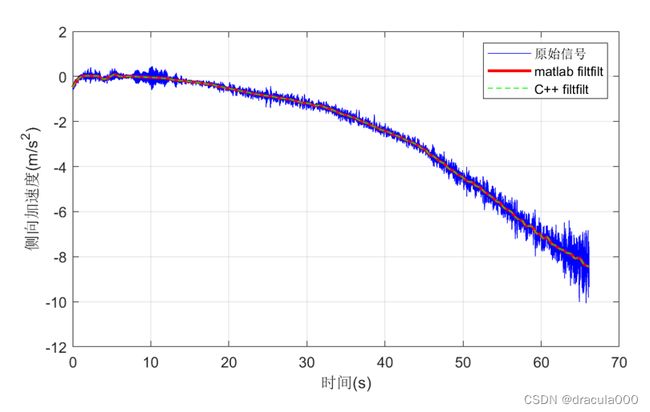
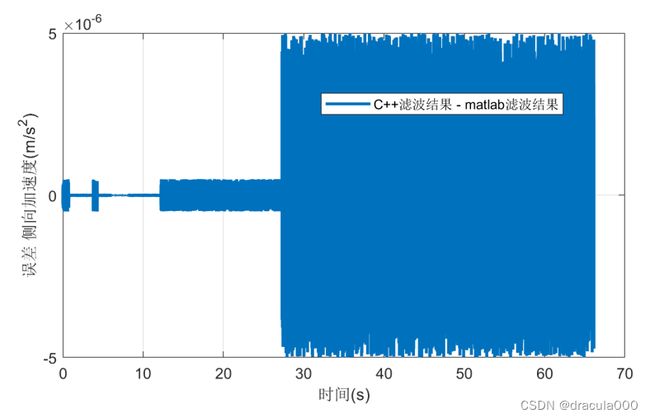
上述公式从i≥N开始计算起,对于i 当i≥N时, 对于阶滤波器,滤波系数和均为N+1维,可通过Matlab的滤波器构造函数获得(如butter函数)。 .h文件 .c文件 使用相同的滤波器,C++的滤波结果与Matlab的filtfilt函数滤波结果对比如下: [1] 零相位(双边)滤波器设计–C++/Matlab
对于阶滤波器,滤波系数分别为和, 为边界优化系数, 为原始信号, 为滤波后的结果。
当i
1.4 滤波器系数获取
边界优化系数zi为N维,通过a和b计算,计算方法如下:nfilt = max(nb,na);
rows = [1:nfilt-1, 2:nfilt-1, 1:nfilt-2];
cols = [ones(1,nfilt-1), 2:nfilt-1, 2:nfilt-1];
vals = [1+a(2), a(3:nfilt)', ones(1,nfilt-2), -ones(1,nfilt-2)];
rhs = b(2:nfilt) - b(1)*a(2:nfilt);
zi = sparse(rows,cols,vals) \ rhs;
% The non-sparse solution to zi may be computed using:
% zi = ( eye(nfilt-1) - [-a(2:nfilt), [eye(nfilt-2); ...
% zeros(1,nfilt-2)]] ) \ ...
% ( b(2:nfilt) - b(1)*a(2:nfilt) );
2.C++实现及对比
2.1 C++实现
#pragma once
struct stFilterCoeff
{
int len;
double *a;
double *b;
double *zi;
};
template#include "mFiltFilt.h"
FiltFilt::FiltFilt(const int alen, const int blen, double *a, double *b, double *zi)
{
myfilter.len = getMax(alen, blen); //使a和b同维度
myfilter.a = new double[myfilter.len];
myfilter.b = new double[myfilter.len];
myfilter.zi = new double[myfilter.len - 1];
for (int i = 0; i < myfilter.len; i++)
{
myfilter.a[i] = a[i];
myfilter.b[i] = b[i];
}
for (int i = 0; i < myfilter.len-1; i++)
{
myfilter.zi[i] = zi[i];
}
}
void FiltFilt::filtfiltData(const double *sig, double *sout, const int data_len)
{
// 零相位滤波
int N = myfilter.len;
int nfact = 3 * (N - 1);
int len_ext = data_len + 2 * nfact; //信号延拓后的长度
double *s_ext = new double[len_ext]; // 延拓后的信号(待滤波)
double *s_fft = new double[len_ext]; // 滤波后的信号
// 延拓 sig -> s_ext
signalExtend(sig, s_ext, data_len, nfact);
// 滤波 s_ext -> s_fft
filtData(s_ext, s_fft, len_ext);
// 翻转 s_fft -> s_ext
dataRollover(s_fft, s_ext, len_ext);
// 滤波 s_ext -> s_fft
filtData(s_ext, s_fft, len_ext);
// 翻转 s_fft -> s_ext
dataRollover(s_fft, s_ext, len_ext);
// 输出 s_ext -> sout
for (int i = 0; i < data_len; i++)
{
sout[i] = s_ext[i + nfact];
}
}
void FiltFilt::filtData(const double *sig, double *sout, const int data_len)
{
int N = myfilter.len;
for (int i = 0; i < data_len; i++)
{
sout[i] = sig[i];
//printf("sig[%d]=%f\n", i, sig[i]);
}
for (int i = 0; i < N-1; i++)
{
double tmp = myfilter.zi[i] * sig[0];
for (int j = 0; j < i+1; j++)
{
tmp += myfilter.b[j] * sig[i - j];
}
for (int j = 1; j < i+1; j++)
{
tmp -= myfilter.a[j] * sout[i - j];
}
sout[i] = tmp;
}
for (int i = N - 1; i < data_len; i++)
{
double tmp = 0;
for (int j = 0; j < myfilter.len; j++)
{
tmp += myfilter.b[j] * sig[i - j];
}
for (int j = 1; j < myfilter.len; j++)
{
tmp -= myfilter.a[j] * sout[i - j];
}
sout[i] = tmp;
//printf("out[%d]=%f\n",i, tmp);
}
}
int FiltFilt::signalExtend(const double *sig, double *sout, const int data_len, const int nfact)
{
// 数据延拓
int head_extN = nfact;
int tail_extN = nfact;
int data_extN = data_len + head_extN + tail_extN;
double data0 = 2*sig[0];
double data1 = 2*sig[data_len-1];
for (int i = 0; i < head_extN; i++)
{
sout[i] = data0-sig[head_extN - i];
}
for (int i = head_extN; i < data_len + head_extN; i++)
{
sout[i] = sig[i - head_extN];
}
for (size_t i = data_len + head_extN; i < data_extN; i++)
{
sout[i] = data1-sig[data_len + head_extN - i + data_len - 2];
}
return data_extN;
}
void FiltFilt::dataRollover(const double *sig, double *sout, const int data_len)
{
// 数据翻转
for (int i = 0; i < data_len; i++)
{
//printf("sig[%d]=%f\n", i, sig[i]);
sout[data_len - i - 1] = sig[i];
}
}
滤波结果对比
参考文献
补充 Zi 计算
// a b 就是分子分母系数
double[] ComputeZi()
{
int nLen = a.Length - 1;
Matrix ma = Matrix.Zeros(nLen, nLen);
Matrix mb = Matrix.Zeros(nLen, 1);
ma[0, 0] = a[1] + 1;
for (int i = 1; i < nLen; i++)
{
ma[i, 0] = a[i + 1];
ma[i, i] = 1;
ma[i - 1, i] = -1;
}
for (int i = 0; i < nLen; i++)
{
mb[i, 0] = b[i + 1] - a[i + 1] * b[0];
}
Matrix mz = ma.Solve(mb); // 基于 Matrix LU 分解的矩阵求解
return mz.ToArray();
}