Yolov8小目标检测-添加模块改进-实验记录
简介,本文通过结合了一些先进的算法改进了yolov8小目标检测能力,以下是一些记录。
数据集:足球比赛数据集,里面只有两个类别足球和人。
兄弟姐妹们,如果本文对你有用,点赞收藏一下呗,☺️☺️☺️☺️
import os
from ultralytics import YOLO
model = YOLO('yolov8n.yaml') # 后缀n就调用n的模型
# Train the model
model.train(data='./ultralytics/datasets/soccer.yaml', epochs=100, imgsz=640)
# val
metrics = model.val() # no arguments needed, dataset and settings remembered
metrics.box.map # map50-95
metrics.box.map50 # map50
metrics.box.map75 # map75
metrics.box.maps
# # predict
# model.predict('datasets/soccernet/tracking/images/test/SNMOT-132/img1', save=True, imgsz=640, conf=0.5)
# results = model('datasets/soccernet/tracking/images/train/SNMOT-061/img1/')
# for result in results:
# boxes = result.data # Boxes object for bbox outputs
# masks = result.masks # Masks object for segmentation masks outputs
# keypoints = result.keypoints # Keypoints object for pose outputs
# probs = result.probs # Class probabilities for classification outputs
# export
# model.export(format='onnx')
以下是我实验的一些记录:持续更新中~
实验1. baseline: 使用yolov8n.yaml训练
map: 0.371
person: 0.648
soccer: 0.095
实验2. 使用yolov8n-p2.yaml训练,四个头预测目标,大尺寸的特征图P2也预测目标。足球提升4%。
复杂度:277 layers, 2926824 parameters, 2926808 gradients, 12.3 GFLOPs
map: 0.387
person: 0.639
soccer: 0.135
实验3. 使用yolov8-p2-exp1-spdconv.yaml训练(注意调用其中的n模型需要这样调用model = YOLO('yolov8n-p2-exp1-spdconv.yaml')),在yolov8后加n即可。把conv修改成spdconv,减少步长和池化对小目标检测的影响,原论文链接 。在实验2的基础上提升了1%
添加新模块的步骤如下:
- 1. 在ultralytics/nn/modules/conv.py下添加,space_to_depth。


- 2. 在ultralytics/nn/modules/init.py添加模块
- 3. 在ultralytics/nn/tasks.py添加模块
- 4. 在ultralytics/nn/tasks.py,添加通道数判断,用于后续提取指定序号的模块的输出。
最后新建配置文件yolov8-p2-exp1-spdconv.yaml,放置ultralytics/models/v8/yolov8-p2-exp1-spdconv.yaml,附上我的配置
# Ultralytics YOLO , AGPL-3.0 license
# YOLOv8 object detection model with P2-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024]
s: [0.33, 0.50, 1024]
m: [0.67, 0.75, 768]
l: [1.00, 1.00, 512]
x: [1.00, 1.25, 512]
# YOLOv8.0 backbone, 修改space_to_depth后面模块的输入通道数4倍
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 1]] # 0-P1/2
- [-1,1,space_to_depth,[1]]
- [-1, 1, Conv, [128, 3, 1]] # 128*4,2-P2/4
- [-1,1,space_to_depth,[1]]
- [-1, 3, C2f, [128, True]] # 128*4
- [-1, 1, Conv, [256, 3, 1]] # 5-P3/8
- [-1,1,space_to_depth,[1]]
- [-1, 6, C2f, [256, True]] # 256*4
- [-1, 1, Conv, [512, 3, 1]] # 8-P4/16
- [-1,1,space_to_depth,[1]]
- [-1, 6, C2f, [512, True]] # 512*4
- [-1, 1, Conv, [1024, 3, 1]] # 11-P5/32
- [-1,1,space_to_depth,[1]]
- [-1, 3, C2f, [1024, True]] # 1024*4
- [-1, 1, SPPF, [1024, 5]] # 14
# YOLOv8.0-p2 head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 10], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 17
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 7], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 20 (P3/8-small)
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P2
- [-1, 3, C2f, [128]] # 23 (P2/4-xsmall)
- [-1, 1, Conv, [128, 3, 1]]
- [-1,1,space_to_depth,[1]]
- [[-1, 20], 1, Concat, [1]] # cat head P3
- [-1, 3, C2f, [256]] # 27 (P3/8-small)
- [-1, 1, Conv, [256, 3, 1]]
- [-1,1,space_to_depth,[1]]
- [[-1, 17], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 31 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 1]]
- [-1,1,space_to_depth,[1]]
- [[-1, 14], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 35 (P5/32-large)
- [[23, 27, 31, 35], 1, Detect, [nc]] # Detect(P2, P3, P4, P5)
复杂度:285 layers, 3330792 parameters, 3330776 gradients, 20.2 GFLOPs
map: 0.398
person: 0.652
soccer: 0.144
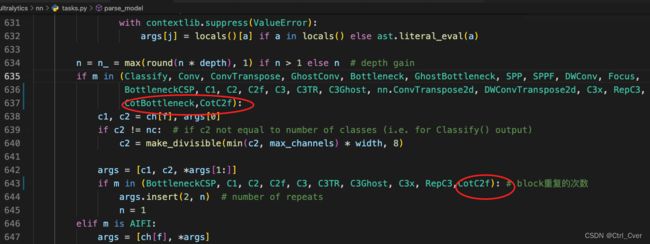
实验4. 使用CoTAttention替换bottleneck里面的conv。配置文件yolov8-p2-exp2-cotattention.yaml。
- 添加模块步骤与上述相似,这里就贴几张图。




复杂度:349 layers, 2436264 parameters, 2436248 gradients, 10.9 GFLOPs
map: 0.374
person: 0.63
soccer: 0.118
实验5. 去除深层的网络,配置见图。
复杂度:218 layers, 1094118 parameters, 1094102 gradients, 10.8 GFLOPs
map: 0.374
person: 0.631
soccer: 0.117
实验6. 实验5的基础上,yolov8n改成v8s,相当于加深了通道数。加深了网络提升了精度,意料之中,但是gflops增加的太多了。
复杂度:218 layers, 3734518 parameters, 3734502 gradients, 31.3 GFLOPs
map: 0.399
person: 0.648
soccer: 0.15
实验7. 因为小目标一般都是浅层特征图预测的,所以提升backbone的浅层的block数目,减少了深层次block的数目。

复杂度:298 layers, 2957800 parameters, 2957784 gradients, 13.1 GFLOPs
map: 0.389
person: 0.642
soccer: 0.136
实验8. 参考tinydet,主要思想卷积的时候stride=2会导致特征mismatch,因此卷积后加一个avg pooling来避免这种情况。代码如图:

复杂度:278 layers, 2927544 parameters, 2927528 gradients, 16.5 GFLOPs
map: 0.396
person: 0.653
soccer: 0.139