一文弄懂基于图搜索的路径规划算法A*与Dijkstra(有python代码)
基于图搜索路径规划-Dijkstra与A*
关注晓理紫并回复Dijkstra,A*获取代码
[晓理紫]
1、 基于图搜索路径规划算法的框架
基于图搜索的路径规划的算法框架都很统一,下面便是通用的算法框架
1、维护一个容器以存储要访问的所有节点 OpenList
2、容器以启动状态起点 $X_s$ 进行初始化 OpenList.push($X_s$)
3、循环 (OpenList 为空或者找到目标点退出循环)
4、根据一些预定义的评分函数从容器中删除节点(根据一定的规则对OpenList进行排序)(注意:Dijkstra与A*在此处有所不同)
访问节点(可能添加到ClosedList中)
5、扩展:获取该节点的所有邻居(找到该节点的邻居节点)(JPS与A*在此处有所不同)
发现所有邻居
6、将邻居推入容器 OpenList.push($X_n$)(符合条件的)
7、结束循环
1.1 一些问题
-
什么时候结束循环?
- 当 OpenList 为空或者找到目标点退出循环
-
如何处理图是循环的?
- 把从 OpenList 删除的节点存储在 ClosedList 中并标记为已访问,下次不在访问
2、广度优先搜索与深度优先搜索
2.1 广度优先搜索
广度搜索采用的是队列进行存储节点,先进先出
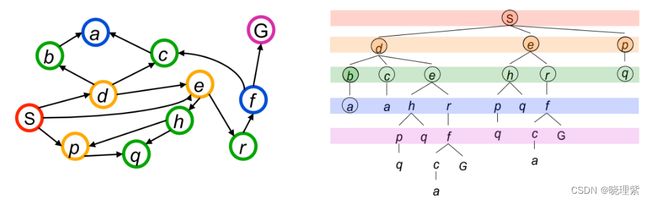
2.2.1 搜索过程
1、openList使用开始节点初始化: [s]
2、弹出首位元素s并获取s的邻居,把邻居加入到openList:[d,e,p] 把s加入closedList:[s]
3、弹出首位元素d并获取d的邻居,把邻居加入到openList:[e,p,b,c,e],把d加入closedList:[s,d]
4、弹出首位元素e并获取e的邻居,把邻居加入到openList:[p,b,c,e,h,r],把e加入closedList:[s,d,e]
5、弹出首位元素p并获取p的邻居,把邻居加入到openList:[b,c,e,h,r,q],把p加入closedList:[s,d,e,p]
6、弹出首位元素b并获取b的邻居,把邻居加入到openList:[c,e,h,r,q,a],把b加入closedList:[s,d,e,p,b]
7、弹出首位元素c并获取c的邻居,把邻居加入到openList:[e,h,r,q,a,h,r],把c加入closedList:[s,d,e,p,b,c]
8、弹出首位元素e,e已经访问就不在访问:[h,r,q,a,h,r],[s,d,e,p,b,c]
...
依次类推直到openList为空或者找到目标为止
2.3 深度优先搜索
深度优先搜索采用的是栈进行存储节点,先进后出
2.3.1 搜索过程
1、openList使用开始节点初始化: [s]
2、弹出首位元素s并获取s的邻居,把邻居加入到openList:[p,e,d] 把s加入closedList:[s]
3、弹出首位元素d并获取d的邻居,把邻居加入到openList:[p,e,e,c,b],把d加入closedList:[s,d]
4、弹出首位元素b并获取b的邻居,把邻居加入到openList:[p,e,e,c,a],把b加入closedList:[s,d,b]
5、弹出首位元素a并获取a的邻居,把邻居加入到openList:[p,e,e,c],把a加入closedList:[s,d,b,a]
6、弹出首位元素c并获取c的邻居,把邻居加入到openList:[p,e,e,a],把c加入closedList:[s,d,b,a,c]
7、弹出首位元素a,a已访问不再处理[p,e,e],[s,d,b,a,c]
8、弹出首位元素e,并获取e的邻居,把邻居加入到openList:[p,e,h,r],把e加入closedList:[s,d,b,a,c,e]
...
依次类推直到openList为空或者找到目标为止
3、贪心算法
BFS 和 DFS 根据“最先进入”或“最后进入”来选择边界外的下一个节点。贪婪最佳优先根据某种规则(称为启发式)选择“最佳”节点。所谓的启发就是对从当前点到目标点距离的猜想。
3.1、启发函数设计的原理
- 启发式方法可以引导更快的走向目标。
- 启发式应该易于计算。
3.2、广度搜索与贪心搜索的对比
| 广度 | 贪心 |
|---|---|
 |
|
 |
|
可以看出贪心算法的速度之快。但是贪心出来的路径一定是最优的么?
4、Dijkstra 算法
Dijkstra 的策略是扩展/访问累积成本 g(n)最便宜的节点,也就是当节点插入到 OpenList 中时通过 g(n)的值进行排序,值越小就越先弹出,其中
• g(n):从起始状态到节点“n”的累积成本的当前最佳估计(从开始节点到当前节点需要的最小代价)
• 更新节点“n”的所有未扩展邻居“m”的累积成本 g(m)
• 保证已扩展/访问的节点从开始状态起具有最小的成本
4.1、代码框架
1、维护一个优先级队列,存放所有需要扩容的节点 (优先队列通过g(n)对插入节点进行排序,确保最小g(n)可以优先弹出)
2、优先级队列初始化为起始状态 $X_s$
3、为图中的所有其他节点分配 g($X_s$ )=0 和 g(n)=无穷大(n是未访问节点)
4、循环(直到队列为空或者找到目标节点)
如果队列为空,则返回FALSE; 退出;
从优先级队列中删除 g(n) 最低的节点“n”
将节点“n”标记为已展开(加入closedList)
对于节点“n”的所有未扩展邻居“m”进行扩展
如果 g(m) = 无穷大(说明未访问过)
g(m)= g(n) + Cnm(从起点到n节点的代价g(n)+从n节点到m节点的代价)
将节点“m”推入队列(加入openList)
如果 g(m) > g(n) + Cnm(说明已经访问过,之修改g值不加入openList中)
g(m)= g(n) + Cnm
5、结束循环
4.2、 搜索过程

每次都考虑访问从起点到当前点 n 最小代价的的节点 n
1、openList使用开始节点初始化: [s:0] (节点s的g为0)
2、弹出首位元素s并获取s的邻居,把邻居加入到openList并排序:[p:1,d:3,e:9] 把s加入closedList:[s]
3、弹出首位元素p并获取p的邻居,把邻居加入到openList并排序:[d:3,e:9,q:17],把p加入closedList:[s,p]
4、弹出首位元素d并获取d的邻居,把邻居加入到openList并排序:[b:7,e:8,c:14,q:17](通过d节点到e的代码变小了由9变成了8),把d加入closedList:[s,p,d]
...
依次类推直到openList为空或者找到目标为止
4.3、 演示
| Dijkstra | 贪心 |
|---|---|
 |
|
 |
|
贪心算法依旧很快,但是它是最优的么:
| Dijkstra | 贪心 |
|---|---|
 |
|
 |
|
可以看出贪心算法虽然很快但是在一些场景并不能得到最优解。
5、A* 算法
Dijkstra 算法可以到的最优解但是搜索速度慢,贪心算法速度快但是无法得到最优解,那么有没有既可以得到最优解速度又快的算法呢。答案是有的。
A* 算法 = Dijkstra 算法 + 贪心算法(因为 A*算法排序依据 f = g + h)
5.1、名词说明
-
累计成本(g(n)):从起始状态到节点“n”的累积成本的最小代价
-
启发式(h(n)):从节点 n 到目标状态的估计最小成本(即目标成本)
-
最小总成本(f(n) = g(n) + h(n))从起始状态到目标状态经过节点“n”的最小估计成本
-
Openlist 排序策略:扩展最便宜的节点 f(n) = g(n) + h(n)
-
更新节点“n”的所有未扩展邻居“m”的累积成本 g(m),保证已扩展的节点从起始状态开始具有最小的成本
5.2、代码框架
1、维护一个优先级队列,存放所有需要扩容的节点(OpenList)
2、所有节点的启发式函数 h(n) 都是预先定义的(可采用曼哈顿距离, 欧氏距离等)
3、优先级队列初始化为起始状态 $X_s$(OpenList.push($X_s$))
4、为图中的所有其他节点分配 g($X_s$)=0 和 g(n)=无穷大
5、循环(直到队列为空或者找到目标节点))
如果队列为空,则返回FALSE; 返回;’
从优先级队列中删除 f(n)=g(n)+h(n) #最低的节点“n”(h(0)==0时是Dijkstra算法,g(n)==0时是贪心算法)
将节点“n”标记为已展开 #将n加入ClosedList中
对于节点“n”的所有未扩展邻居“m”
如果 g(m) = 无穷大 #说明未扩展
g(m)= g(n) + Cnm #(从起点到n节点的代价g(n)+从n节点到m节点的代价)
将节点“m”推入队列 #OpenList.push(m)
如果 g(m) > g(n) + Cnm
g(m)= g(n) + Cnm #说明已经访问过,只修改g值不加入openList中
6、结束循环
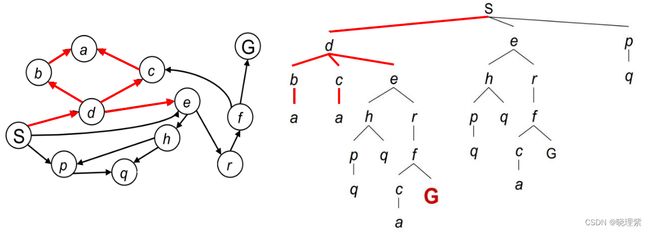
5.3、搜索过程
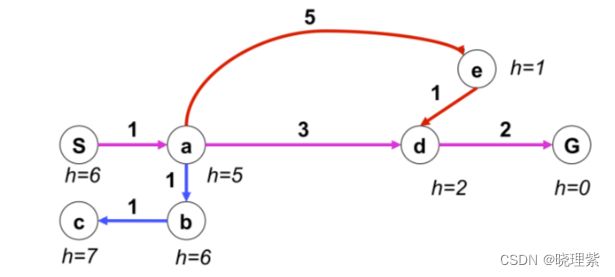
1、openList使用开始节点初始化: [s:6] (节点s的f为6)
2、弹出首位元素s并获取s的邻居,把邻居加入到openList并排序:[a:6](g=1,h=5) 把s加入closedList:[s]
3、弹出首位元素a并获取a的邻居,把邻居加入到openList并排序:[d:6,e:7,b:12]把a加入closedList:[s,a]
4、弹出首位元素d并获取d的邻居,把邻居加入到openList并排序:[g:6,e:7,b:12]把d加入closedList:[s,a,d]
5、弹出首位元素g,到达目标退出
5.4、问题
A*找到的路径一定是最优的么
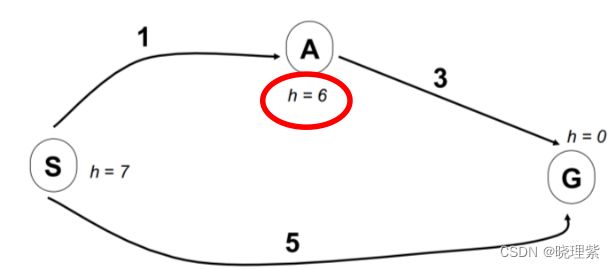
-
从图中可以看出来,按照 A*算法直接走 S->G,其实 S->A->G 才是最优路径。
-
问题原因是 A 点到目标点估计的代价 h 大于了真是的代价。为了解决此问题,需要估计值 h 小于等于到目标的真实代价。
5.5、启发函数的选择
选择原则:对于所有节点“n”,h(n) <= h*(n),其中 h*(n) 是从节点“n”到达目标的真正最低代价
- 哪些启发函数是可接受的呢
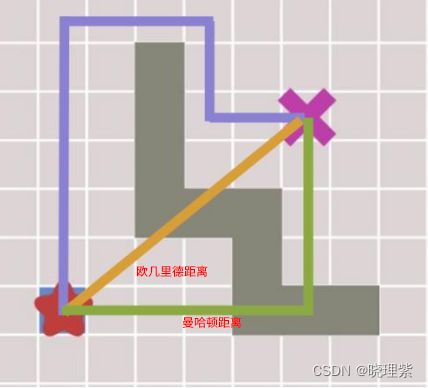
- 欧几里德距离:欧几里德距离(L2 范数)是可接受的,无论小车是否可对角行走估计出来的值总是小于等于实际值
- 曼哈顿距离 曼哈顿距离(L1 范数)分情况可接受,当小车不允许对角线行走时是可接受的,当小车允许对角线行走时是不可接受的。因为猜测代价 2>真实代价根号 2
- L∞ 范数距离是可接受的,(L∞ 范数距=max(|x2-x1|,|y2-y1|))
- 0 距离总是可接受的,当 h=0 时一定是小于真实代价的
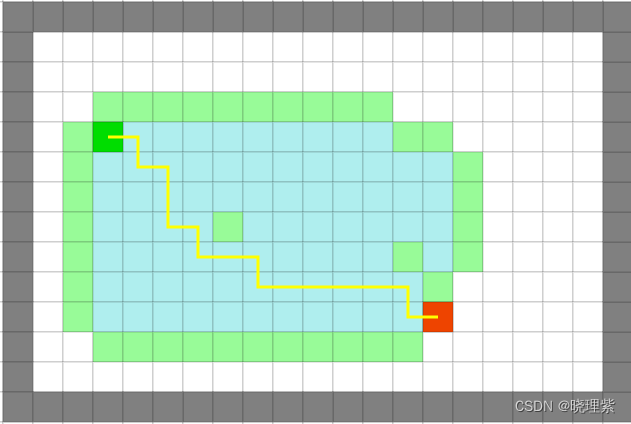
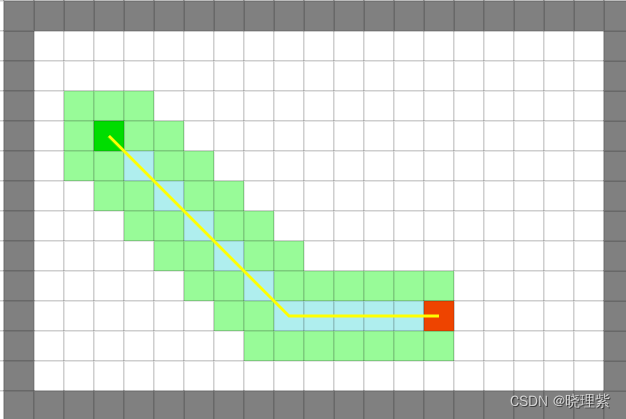
5.6、Dijkstra’s VS A*
| A* | Dijkstra |
|---|---|
 |
|
 |
|
| ) |
可以看出 A*可以高效的进行搜索并且可以得到比较好的路径
5.7、次优解
有时为了达到更快的速度,A*可以向贪心方向发展放弃最优解的到次优速度很快的解。
只要把启发函数的比值提高就行,基于 f = ag + εh 扩展状态,ε > 1 = 偏向更接近目标的状态。这就是权重 A*
| A*(ε ==1) | A*(ε ==2) |
|---|---|
 |
|
 |
|
5.8 使用经验
-
如何将网格表示为图形?
- 每个单元格都是一个节点。 用边连接相邻的单元格。
-
如何选择最好的启发式函数
- 通常使用欧式距离,L∞ 范数距离是较好的但是不最好的,因为没有一个是紧的,搜索范围都是较宽的。
- 通常使用欧式距离,L∞ 范数距离是较好的但是不最好的,因为没有一个是紧的,搜索范围都是较宽的。
主要原因是在搜索过程中存在需要 f 值相同的对称路径,只要让 f 值略有差别就可以很好的解决这个问题。
解决方法:
-
选择最好的启发函数:对角启发函数 (Diagonal Heuristic)
- 2D 计算公式:dx=abs(node.x −goal.x),dy=abs(node.y −goal.y),h=(dx+dy)+(√2−2)∗min(dx,dy)
-
打破对称性
-
通过稍微干扰 ℎ,操纵 值打破平局,使相同的 值不同。
h = hx(1.0+p)
p < / ℎ (一步的最小成本/预期最大路径成本)
-
首选从起点到目标沿直线的路径。
1 = ( . − . )
1 = (. − . )
2 = . − .
2 = . − .
= (1 × 2 − 2 × 1)
h = ℎ + × 0.001
-
-
使用 Jump Point Search (JPS)算法
下面节继续介绍JPS算法
6 代码获取方式
搜索并关注晓理紫并回复有AD获取代码
{晓理紫|小李子}喜分享,也很需要你的支持,喜欢留下痕迹哦!