【考研数学】高等数学第六模块 —— 空间解析几何(2,向量的应用)
文章目录
- 引言
- 二、向量的应用
-
- 2.1 平面
- 2.2 直线
- 2.3 特殊曲面
-
- 2.3.1 旋转曲面
- 2.3.2 柱面
- 2.4 距离
- 2.5 夹角
- 写在最后
引言
承接前文,介绍完向量的基本概念与运算后,我们来看看向量有哪些应用。
二、向量的应用
2.1 平面
(一)平面的点法式方程
设 M 0 ( x 0 , y 0 , z 0 ) ∈ π M_0(x_0,y_0,z_0) \in \pi M0(x0,y0,z0)∈π ,又有非零向量 n → = { A , B , C } ⊥ π \overrightarrow{n}=\{A,B,C\} \bot \pi n={A,B,C}⊥π ,则平面 π \pi π 的方程为 π : A ( x − x 0 ) + B ( y − y 0 ) + C ( z − z 0 ) = 0. \pi:A(x-x_0)+B(y-y_0)+C(z-z_0)=0. π:A(x−x0)+B(y−y0)+C(z−z0)=0. (二)平面的一般式方程
π : A x + B y + C z + D = 0 \pi:Ax+By+Cz+D=0 π:Ax+By+Cz+D=0 ,其中 n → = { A , B , C } \overrightarrow{n}=\{A,B,C\} n={A,B,C} 是平面 π \pi π 的法向量。
(三)平面的截距式方程
设平面 π \pi π 与三个坐标轴的交点分别为 A ( a , 0 , 0 ) , B ( 0 , b , 0 ) , C ( 0 , 0 , c ) A(a,0,0),B(0,b,0),C(0,0,c) A(a,0,0),B(0,b,0),C(0,0,c) ,其中 a , b , c a,b,c a,b,c 为非零常数,则平面 π : x / a + y / b + z / c = 1. \pi:x/a+y/b+z/c=1. π:x/a+y/b+z/c=1.
(四)平面的三点式方程
设 A ( a 1 , b 1 , c 1 ) , B ( a 2 , b 2 , c 2 ) , C ( a 3 , b 3 , c 3 ) A(a_1,b_1,c_1),B(a_2,b_2,c_2),C(a_3,b_3,c_3) A(a1,b1,c1),B(a2,b2,c2),C(a3,b3,c3) 为不在一条直线上的三点,则 A , B , C A,B,C A,B,C 确定唯一平面 π \pi π ,平面的法向量为 n → = A B → × B C → \overrightarrow{n}=\overrightarrow{AB}\times \overrightarrow{BC} n=AB×BC ,再利用点法式方程即可求出平面方程。
2.2 直线
(一)空间直线的一般式方程 L : { A 1 x + B 1 y + C 1 z + D 1 = 0 , A 2 x + B 2 y + C 2 z + D 2 = 0. L:\begin{cases} A_1x+B_1y+C_1z+D_1=0, \\ A_2x+B_2y+C_2z+D_2=0. \end{cases} L:{A1x+B1y+C1z+D1=0,A2x+B2y+C2z+D2=0. 即写成了两个一般平面的交线形式。
(二)直线的对称式(点向式)方程
对于直线 L L L ,若有向量 s → = { m , n , p } / / L \overrightarrow{s}=\{m,n,p\} // L s={m,n,p}//L ,点 M 0 ( x 0 , y 0 , z 0 ) ∈ L M_0(x_0,y_0,z_0)\in L M0(x0,y0,z0)∈L ,则直线 L L L 的点向式方程为 L : x − x 0 m = y − y 0 n = z − z 0 p . L:\frac{x-x_0}{m}=\frac{y-y_0}{n}=\frac{z-z_0}{p}. L:mx−x0=ny−y0=pz−z0. (三)直线的参数式方程
空间直线的参数式方程为 L : { x = x 0 + m t , y = y 0 + n t , z = z 0 + p t , L:\begin{cases} x=x_0+mt, \\ y=y_0+nt, \\ z=z_0+pt, \end{cases} L:⎩ ⎨ ⎧x=x0+mt,y=y0+nt,z=z0+pt, 其中, s → = { m , n , p } / / L , M 0 ( x 0 , y 0 , z 0 ) ∈ L . \overrightarrow{s}=\{m,n,p\} // L,M_0(x_0,y_0,z_0) \in L. s={m,n,p}//L,M0(x0,y0,z0)∈L.
2.3 特殊曲面
2.3.1 旋转曲面
(一)二维空间旋转曲面
设曲线 L : f ( x , y ) = 0 , z = 0 L:f(x,y)=0,z=0 L:f(x,y)=0,z=0 为 x O y xOy xOy 平面内的曲线,则曲线 L L L 绕 x x x 轴旋转而成的曲面为 ∑ x : f ( x , ± y 2 + z 2 ) = 0 ; \sum_x:f(x,\pm\sqrt{y^2+z^2})=0; ∑x:f(x,±y2+z2)=0; 曲线 L L L 绕 x x x 轴旋转而成的曲面为 ∑ y : f ( ± x 2 + z 2 , y ) = 0. \sum_y:f(\pm\sqrt{x^2+z^2},y)=0. ∑y:f(±x2+z2,y)=0.
即绕哪个轴旋转,哪个字母不变,其余字母换成轴字母外其他两个字母的平方和开根号。
(二)三维空间直线旋转曲面
设 L : x − a m = y − b n = z − c p L:\frac{x-a}{m}=\frac{y-b}{n}=\frac{z-c}{p} L:mx−a=ny−b=pz−c ,其绕 z z z 轴旋转而成的曲面求法如下:
设 L L L 绕 z z z 轴旋转而成的曲面为 ∑ \sum ∑ ,如下图所示。
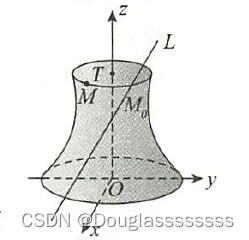
任取 M ( x , y , z ) ∈ ∑ M(x,y,z)\in \sum M(x,y,z)∈∑ , M M M 所在的圆位于 L L L 上的点为 M 0 ( x 0 , y 0 , z ) M_0(x_0,y_0,z) M0(x0,y0,z) ,圆心为 T ( 0 , 0 , z ) T(0,0,z) T(0,0,z) 。由于 ∣ M T ∣ = ∣ M 0 T ∣ |MT|=|M_0T| ∣MT∣=∣M0T∣ ,得 x 2 + y 2 = x 0 2 + y 0 2 x^2+y^2=x_0^2+y_0^2 x2+y2=x02+y02 , M 0 ∈ L M_0\in L M0∈L ,代入直线方程,有 x 0 − a m = y 0 − b n = z − c p \frac{x_0-a}{m}=\frac{y_0-b}{n}=\frac{z-c}{p} mx0−a=ny0−b=pz−c ,联立可解得: x 0 = m z / p + a − m c / p , y 0 = n z / p + b − n c / p . x_0=mz/p+a-mc/p,y_0=nz/p+b-nc/p. x0=mz/p+a−mc/p,y0=nz/p+b−nc/p. ,于是可得所求曲面方程为 ∑ : x 2 + y 2 = ( m z / p + a − m c / p ) 2 + ( n z / p + b − n c / p ) 2 . \sum:x^2+y^2=(mz/p+a-mc/p)^2+(nz/p+b-nc/p)^2. ∑:x2+y2=(mz/p+a−mc/p)2+(nz/p+b−nc/p)2.
关键就是旋转后 z z z 不变,且到圆心的距离相等,可以联立。
2.3.2 柱面
直线 L L L 沿着曲线 C C C 平行移动形成的轨迹叫作柱面,定曲线 C C C 叫作柱面的准线,动直线 L L L 叫作柱面的母线。
(一)母线平行于坐标轴的柱面

(二)投影柱面
设 L : F ( x , y , z ) = 0 , G ( x , y , z ) = 0 L:F(x,y,z)=0,G(x,y,z)=0 L:F(x,y,z)=0,G(x,y,z)=0 为空间直线,过 L L L 且平行于 z z z 轴的柱面方程 H ( x , y ) = 0 H(x,y)=0 H(x,y)=0 即为从 F ( x , y , z ) = 0 , G ( x , y , z ) = 0 F(x,y,z)=0,G(x,y,z)=0 F(x,y,z)=0,G(x,y,z)=0 中消去 z z z 所得方程。
方程 f ( x , y ) = 0 f(x,y)=0 f(x,y)=0 在二维空间内表示曲线,而在三维空间内表示母线平行于 z z z 轴的柱面。
2.4 距离
(一)两点之间的距离
设两点 M 1 ( x 1 , y 1 , z 1 ) , M 2 ( x 2 , y 2 , z 2 ) M_1(x_1,y_1,z_1),M_2(x_2,y_2,z_2) M1(x1,y1,z1),M2(x2,y2,z2) ,则这两点之间的距离为 d = ( x 2 − x 1 ) 2 + ( y 2 − y 1 ) 2 + ( z 2 − z 1 ) 2 . d=\sqrt{(x_2-x_1)^2+(y_2-y_1)^2+(z_2-z_1)^2}. d=(x2−x1)2+(y2−y1)2+(z2−z1)2. (二)点到平面的距离
设点 M 0 ( x 0 , y 0 , z 0 ) M_0(x_0,y_0,z_0) M0(x0,y0,z0) ,平面 π : A x + B y + C z + D = 0 \pi:Ax+By+Cz+D=0 π:Ax+By+Cz+D=0 ,则点 M 0 M_0 M0 到平面 π \pi π 的距离为 d = ∣ A x 0 + B y 0 + C z 0 + D ∣ A 2 + B 2 + C 2 . d=\frac{|Ax_0+By_0+Cz_0+D|}{\sqrt{A^2+B^2+C^2}}. d=A2+B2+C2∣Ax0+By0+Cz0+D∣. (三)点到直线的距离
设点 M 0 ( x 0 , y 0 , z 0 ) M_0(x_0,y_0,z_0) M0(x0,y0,z0) ,直线 L : x − x 1 m = y − y 1 n = z − z 1 p L:\frac{x-x_1}{m}=\frac{y-y_1}{n}=\frac{z-z_1}{p} L:mx−x1=ny−y1=pz−z1 则点 M 0 M_0 M0 到直线 L L L 的距离为 d = ∣ s → × M 0 M 1 → ∣ ∣ s → ∣ d=\frac{|\overrightarrow{s}\times \overrightarrow{M_0M_1}|}{|\overrightarrow{s}|} d=∣s∣∣s×M0M1∣ 其中, s → = { m , n , p } , M 1 ( x 1 , y 1 , z 1 ) ∈ L . \overrightarrow{s}=\{m,n,p\},M_1(x_1,y_1,z_1)\in L. s={m,n,p},M1(x1,y1,z1)∈L.
(四)两平行平面之间的距离
平面 π 1 : A x + B y + C z + D 1 = 0 \pi_1:Ax+By+Cz+D_1=0 π1:Ax+By+Cz+D1=0 ,平面 π 2 : A x + B y + C z + D 2 = 0 \pi_2:Ax+By+Cz+D_2=0 π2:Ax+By+Cz+D2=0 ,则平面 π 1 , π 2 \pi_1,\pi_2 π1,π2 之间的距离为 d = ∣ D 1 − D 2 ∣ A 2 + B 2 + C 2 . d=\frac{|D_1-D_2|}{\sqrt{A^2+B^2+C^2}}. d=A2+B2+C2∣D1−D2∣. (五)两空间直线之间的距离
设 L 1 : x − x 1 m 1 = y − y 1 n 1 = z − z 1 p 1 , L 2 : x − x 2 m 2 = y − y 2 n 2 = z − z 2 p 2 L_1:\frac{x-x_1}{m_1}=\frac{y-y_1}{n_1}=\frac{z-z_1}{p_1},L_2:\frac{x-x_2}{m_2}=\frac{y-y_2}{n_2}=\frac{z-z_2}{p_2} L1:m1x−x1=n1y−y1=p1z−z1,L2:m2x−x2=n2y−y2=p2z−z2 为两条直线, s 1 → = { m 1 , n 1 , p 1 } , s 2 → = { m 2 , n 2 , p 2 } \overrightarrow{s_1}=\{m_1,n_1,p_1\},\overrightarrow{s_2}=\{m_2,n_2,p_2\} s1={m1,n1,p1},s2={m2,n2,p2} 分别为 L 1 , L 2 L_1,L_2 L1,L2 的方向向量, M 1 ( x 1 , y 1 , z 1 ) ∈ L 1 , M 2 ( x 2 , y 2 , z 2 ) ∈ L 2 M_1(x_1,y_1,z_1)\in L_1,M_2(x_2,y_2,z_2)\in L_2 M1(x1,y1,z1)∈L1,M2(x2,y2,z2)∈L2 ,则 L 1 , L 2 L_1,L_2 L1,L2 的位置关系如下:
- 当 ( s 1 → × s 2 → ) ⋅ M 1 M 2 → = 0 (\overrightarrow{s_1}\times \overrightarrow{s_2})\cdot \overrightarrow{M_1M_2}=0 (s1×s2)⋅M1M2=0 时, L 1 , L 2 L_1,L_2 L1,L2 共面;
- 当 ( s 1 → × s 2 → ) ⋅ M 1 M 2 → ≠ 0 (\overrightarrow{s_1}\times \overrightarrow{s_2})\cdot \overrightarrow{M_1M_2}\ne0 (s1×s2)⋅M1M2=0 时, L 1 , L 2 L_1,L_2 L1,L2 异面,它们之间的距离为 d = ( s 1 → × s 2 → ) ⋅ M 1 M 2 → ∣ s 1 → × s 2 → ∣ . d=\frac{(\overrightarrow{s_1}\times \overrightarrow{s_2})\cdot \overrightarrow{M_1M_2}}{|\overrightarrow{s_1}\times \overrightarrow{s_2}|}. d=∣s1×s2∣(s1×s2)⋅M1M2.
2.5 夹角
(一)两向量之间的夹角
设 α → , β → \overrightarrow{\alpha},\overrightarrow{\beta} α,β 为两个向量,则 α → , β → \overrightarrow{\alpha},\overrightarrow{\beta} α,β 之间的夹角为 θ = arccos α → ⋅ β → ∣ α → ∣ ∣ β → ∣ . \theta=\arccos \frac{\overrightarrow{\alpha}\cdot \overrightarrow{\beta}}{|\overrightarrow{\alpha}||\overrightarrow{\beta}|}. θ=arccos∣α∣∣β∣α⋅β. (二)两直线之间的夹角
设 L 1 : x − x 1 m 1 = y − y 1 n 1 = z − z 1 p 1 , L 2 : x − x 2 m 2 = y − y 2 n 2 = z − z 2 p 2 L_1:\frac{x-x_1}{m_1}=\frac{y-y_1}{n_1}=\frac{z-z_1}{p_1},L_2:\frac{x-x_2}{m_2}=\frac{y-y_2}{n_2}=\frac{z-z_2}{p_2} L1:m1x−x1=n1y−y1=p1z−z1,L2:m2x−x2=n2y−y2=p2z−z2 为两条直线, s 1 → = { m 1 , n 1 , p 1 } , s 2 → = { m 2 , n 2 , p 2 } \overrightarrow{s_1}=\{m_1,n_1,p_1\},\overrightarrow{s_2}=\{m_2,n_2,p_2\} s1={m1,n1,p1},s2={m2,n2,p2} 分别为 L 1 , L 2 L_1,L_2 L1,L2 的方向向量,则它们之间的夹角为 θ = arccos s 1 → ⋅ s 2 → ∣ s 1 → ∣ ∣ s 2 → ∣ . \theta=\arccos \frac{\overrightarrow{s_1}\cdot \overrightarrow{s_2}}{|\overrightarrow{s_1}||\overrightarrow{s_2}|}. θ=arccos∣s1∣∣s2∣s1⋅s2. (三)两平面之间的夹角
平面 π 1 : A 1 x + B 1 y + C 1 z + D 1 = 0 \pi_1:A_1x+B_1y+C_1z+D_1=0 π1:A1x+B1y+C1z+D1=0 ,平面 π 2 : A 2 x + B 2 y + C 2 z + D 2 = 0 \pi_2:A_2x+B_2y+C_2z+D_2=0 π2:A2x+B2y+C2z+D2=0 , n 1 → = { A 1 , B 1 , C 1 } , n 2 → = { A 2 , B 2 , C 2 } \overrightarrow{n_1}=\{A_1,B_1,C_1\},\overrightarrow{n_2}=\{A_2,B_2,C_2\} n1={A1,B1,C1},n2={A2,B2,C2} 分别为 π 1 , π 2 \pi_1,\pi_2 π1,π2 的法向量,则平面 π 1 , π 2 \pi_1,\pi_2 π1,π2 之间的夹角为 θ = arccos n 1 → ⋅ n 2 → ∣ n 1 → ∣ ∣ n 2 → ∣ . \theta=\arccos \frac{\overrightarrow{n_1}\cdot \overrightarrow{n_2}}{|\overrightarrow{n_1}||\overrightarrow{n_2}|}. θ=arccos∣n1∣∣n2∣n1⋅n2. (四)直线与平面之间的夹角
设平面 π : A x + B y + C z + D = 0 \pi:Ax+By+Cz+D=0 π:Ax+By+Cz+D=0 和直线 L : x − x 1 m = y − y 1 n = z − z 1 p L:\frac{x-x_1}{m}=\frac{y-y_1}{n}=\frac{z-z_1}{p} L:mx−x1=ny−y1=pz−z1 n → = { A , B , C } , s → = { m , n , p } \overrightarrow{n}=\{A,B,C\},\overrightarrow{s}=\{m,n,p\} n={A,B,C},s={m,n,p} 分别为平面的法向量和直线的方向向量,则直线 L L L 和平面 π \pi π 之间的夹角为 θ = arcsin n → ⋅ s → ∣ n → ∣ ∣ s → ∣ . \theta=\arcsin \frac{\overrightarrow{n}\cdot \overrightarrow{s}}{|\overrightarrow{n}||\overrightarrow{s}|}. θ=arcsin∣n∣∣s∣n⋅s.
写在最后
公式好多,好容易记混掉,不过也算蛮有规律的,拿到此,空间解析几何的理论部分就结束了,主要是围绕向量做文章。