系列索引:
- NOIp 图论算法专题总结 (1)
- NOIp 图论算法专题总结 (2)
- NOIp 图论算法专题总结 (3)
网络流
概念 1
容量网络(capacity network)是一个有向图,图的边 \((u, v)\) 有非负的权 \(c(u, v)\),被称为容量(capacity)。
图中有一个被称为源(source)的节点和一个被称为汇(sink)的节点。图中每条边称为弧(arc)。
实际通过每条边的流量记为 \(f(u, v)\)。
残量网络(residual network)是一个结构和容量网络相同的有向图,只不过边的权值为 \(c(u, v) - f(u, v)\)。
所有边上的流量集合被称为网络流(flow network)。
可行流的性质:
容量限制(Capacity constraints):对任意 \(u,v∈V\),\(0\le f(u,v)\le c(u,v).\)
- 流量守恒(Flow conservation):对于任意非源汇节点 \(u∈V\),满足 \(\sum_{(u,v)\in E} f(u,v)=\sum_{(v,u)\in E} f(v,u).\)
斜对称性(Skew symmetry):对任意 \(u,v∈V\),\(f(u,v)=-f(v,u).\)
最大流
增广路定理:网络达到最大流,当且仅当残留网络中没有增广路。
什么是增广路?
度娘百科:若 P 是图 G 中一条联通两个未匹配顶点的路径,且属于 M 的边和不属于 M 的边在 P 上交替出现,则称 P 为相对于 M 的一条增广路径(augmenting path)。(二分图的概念)
Ford–Fulkerson 方法:
本质:贪心!
首先,假如所有边上的流量都没有超过容量 (不大于容量),那么就把这一组流量,或者说,这个流,称为一个可行流。一个最简单的例子就是,零流,即所有的流量都是 0 的流。
我们就从这个零流开始考虑,假如有这么一条路,这条路从源点开始一直一段一段的连到了汇点,并且,这条路上的每一段都满足流量严格 < 容量。那么,我们一定能找到这条路上的每一段的 (容量 – 流量) 的值当中的最小值 Δ。我们把这条路上每一段的流量都加上这个 Δ,一定可以保证这个流依然是可行流,这是显然的。
这样我们就得到了一个更大的流,它的流量是之前的流量 +Δ,而这条路就叫做增广路。
我们不断地从起点开始寻找增广路,每次都对其进行增广,直到源点和汇点不连通,也就是找不到增广路为止。当找不到增广路的时候,当前的流量就是最大流,这个结论非常重要。
寻找增广路的时候我们可以简单的从源点开始做 BFS,并不断修改这条路上的 Δ 量,直到找到源点或者找不到增广路。
– nano9th
Edmonds-Karp 算法:
每次增广先在残量网络上找到一条增广路,然后将这条路上每条边的边权减去增广路上边权最小边的边权。再在该边的反向边上加上这个权值(用于撤消增广操作)。
时间复杂度 \(O(VE^2)\)。
建图:为了方便求取反向边,把一对互为反向边的边建在一起。
int pre[N], id[N]; // pre 标记上一个点,id 标记上一条边
bool v[N];
inline bool bfs() { // 寻找增广路
memset(v, 0, sizeof v);
queue q;
v[s]=true; q.push(s);
while (!q.empty()) {
int x=q.front(); q.pop();
for (int i=head[x]; i; i=nex[i]) if (!v[to[i]] && w[i]) {
pre[to[i]]=x, id[to[i]]=i, v[to[i]]=true;
if (to[i]==t) return true;
q.push(to[i]);
}
}
return false;
}
inline int ek() {
int res=0;
while (bfs()) {
int path=inf; // flow 为新的增广路
for (int i=t; i!=s; i=pre[i]) path=min(path, w[id[i]]);
for (int i=t; i!=s; i=pre[i]) w[id[i]]-=path, w[id[i]^1]+=path; // 正向边减、反向边加
res+=path;
}
return res;
}
head[0]=1; // 直接从 2 开始计数,保证正反向边快速访问
add(a,b,c), add(b,a,0); // 添加反向边 Dinic 算法:
每次都走最短的增广路,并且每次增广允许多条增广路一起增广。
采用分层图(level graph)。对于每一个点,我们根据从源点开始的 BFS 序列,为每一个点分配一个深度,然后我们进行若干遍 DFS 寻找增广路,每一次由 \(u\) 推出 \(v\) 必须保证 \(v\) 的深度必须是 \(u\) 的深度 \(+ 1\)。
时间复杂度最坏 \(O(V^2E)\)。
显然,每次寻找增广路都要重复访问先前已查找过的边,可以优化。
当前弧优化:存储下以 \(u\) 开头的节点的当前弧 \(\text{cur}[u]\),之后遇到 \(u\) 直接从 \(\text{cur}[u]\) 这条弧之后开始寻找,而不必再从 \(\text{head}[u]\) 开始。
int dep[N], cur[N];
inline bool bfs() { // 分层图
memset(dep, 0, sizeof dep);
queue q;
dep[s]=1; q.push(s);
while (!q.empty()) {
int x=q.front(); q.pop();
for (int i=head[x]; i; i=nex[i])
if (w[i]>0 && !dep[to[i]]) // 若该残量不为 0,且 to[i] 还未分配深度,则给其分配深度并放入队列
dep[to[i]]=dep[x]+1, q.push(to[i]);
}
// 当汇点的深度不存在时,说明不存在分层图,同时也说明不存在增广路
if (!dep[t]) return false; else return true;
}
int dfs(int x, int dis) { // 寻找增广路
if (x==t) return dis;
for (int& i=cur[x]; i; i=nex[i]) // cur[x] 记录当前弧
if (dep[to[i]]==dep[x]+1 && w[i]) { // 分层图、残量不为 0
int d=dfs(to[i], min(dis, w[i]));
if (d>0) {w[i]-=d, w[i^1]+=d; return d; }
}
return 0; // 没有增广路
}
inline int dinic() {
int res=0, d;
while (bfs(s, t)) {
for (int i=1; i<=n; i++) cur[i]=head[i]; // 重置当前弧
while (d=dfs(s, inf)) res+=d;
}
return res;
}
head[0]=1; // 直接从 2 开始计数,保证正反向边快速访问
add(a,b,c), add(b,a,0); // 添加反向边 ISAP 算法:
基于分层思想,在每次增广完成后自动更新每个点所在的层。
时间复杂度 \(O(V^2E)\)。
实现略。 (其实是还不会)
最小割
一个网络的割(cut) 是这样一个边集,如果把这个集合的边删去,这个网络就不再连通。
这个边集中边的容量和被称为割的容量。容量最小的割被称为最小割(minimum cut)。
最大流最小割定理:对于一个容量网络,其最大流等于最小割的容量。
最小割在数值上等于最大流。
应用
点最大容量限制:
拆点,将一个点 \(u\) 拆成入点 \(u_{in}\) 和出点 \(u_{out}\) 两个,将所有指向 \(u\) 的边连接到 \(u_{in}\),容量不变,从 \(u\) 连出的边改为从 \(u_{out}\) 连出,容量不变;最后再从 \(u_{in}\) 向 \(u_{out}\) 连接一条容量为 \(u\) 容量限制的边。
求多个(不重复)最长不下降子序列:
DP 求最长不下降子序列长度 \(s\)。
拆点。每个点向比它大 \(1\) 的点连一条容量为 \(1\) 的边。\(S\) 向 \(dp[1]\) 连一条容量为 \(1\) 的边,\(dp[s]\) 向 \(T\) 连一条容量为 \(1\) 的边。求最大流。
二分图匹配:
将原二分图的边的容量设为 \(1\),\(S\) 向左部的节点连一条容量为 \(1\) 的边,右部的节点向 \(T\) 连一条容量为 \(1\) 的边。
如果二分图的一条边在匹配中,那么两个点对应的 \(S\) 和 \(T\) 的边一定满流,不可能再被匹配。
费用流
最小费用最大流:
每次在找增广路的时候都找费用最小的增广路;利用 SPFA 算法来寻找,边权就是费用。
int head[N], nex[M], to[M], w[M], c[M];
int d[N], f[N], pre[N], id[N]; // pre 标记上一个点,id 标记上一条边
bool inq[N];
inline void add(int x, int y, int z, int zz) {
nex[++head[0]]=head[x], head[x]=head[0], to[head[0]]=y;
w[head[0]]=z, c[head[0]]=zz;
}
inline bool spfa() { // 寻找增广路
memset(d, 0x3f, sizeof d);
memset(f, 0x3f, sizeof f);
memset(inq, false, sizeof inq);
queue q;
q.push(s), d[s]=0, inq[s]=true;
while (!q.empty()) {
int x=q.front(); q.pop(); inq[x]=false;
for (int i=head[x]; i; i=nex[i])
if (w[i] && d[to[i]]>d[x]+c[i]) {
d[to[i]]=d[x]+c[i];
f[to[i]]=min(w[i], f[x]);
pre[to[i]]=x, id[to[i]]=i;
if (!inq[to[i]]) q.push(to[i]), inq[to[i]]=true;
}
}
return f[t]!=f[s];
}
inline void mcmf() {
int flow=0, cost=0;
while (spfa()) {
for (int i=t; i!=s; i=pre[i]) w[id[i]]-=f[t], w[id[i]^1]+=f[t];
flow += f[t], cost += f[t] * d[t];
}
printf("%d %d\n", flow, cost);
}
head[0]=1;
add(a, b, aa, bb), add(b, a, 0, -bb); 众所周知:
NOI2018 D1T1 出题人:“SPFA 它死了!”
考虑使用 Dijkstra 替换 SPFA。
如何实现负权边?
暴力加上一个值!(爆long long)给每个点定义一个势 \(h\),将转移从 \(d(u)=d(v)+w\) 改成 \(d(u)=d(v)+w+h(v)−h(u)\),并保证 \(w+h(v)−h(u)≥0\)。参见 Link 。
概念 2
点覆盖集(vertex cover)是无向图的一个点集,使得该图中的所有边至少有一个端点在该集合内。
点数最少的点覆盖集被称为最小点覆盖集。
点独立集(independent set)是无向图的一个点集,使得该集合中任意两个点之间不连通。
点数最多的点被称为最大点独立集。
引理:
最小点覆盖集 \(=\) 最大匹配 \(= V -\) 最大点独立集 \(= V -\) 最小边覆盖。
最大点权独立集 \(= \sum \textrm{val}(x) -\) 最小点权覆盖集。
最小点权覆盖集 \(=\) 最小割。
最大点权闭合子图 \(= \sum \{\textrm{val}(x)| \textrm{val}(x)>0\} -\) 最小割
二分图
概念
什么是二分图(bipartite graph)?
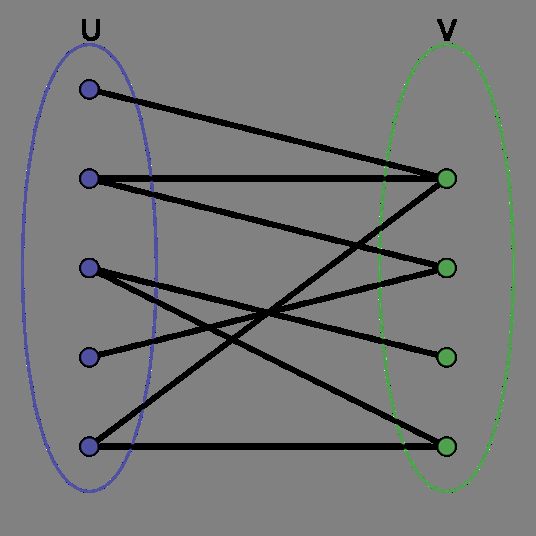
性质:不存在节点个数为奇数的环。
二分图染色
二分图染色(判断是否二分图):
int col[N]; bool v[N];
bool dfs(int x) {
v[x] = true;
for (int i=head[x]; i; i=nex[i]) {
if (!v[to[i]]) {
col[to[i]] = col[x] ^ 1;
if (!dfs(to[i])) return false;
} else if (col[x]==col[to[i]]) return false;
}
return true;
}
int flag = true;
for (int i=1; i<=n; i++) if (!v[i] && !dfs(i)) {
flag = false; break;
}
if (flag) printf("Yes\n"); else printf("No\n");二分图匹配
二分图的匹配(matching)是一些边,要求满足每个节点最多只被这些边里面的一条边覆盖。
所有匹配中,边数最多的匹配被称为二分图的最大匹配。
匈牙利算法:
从二分图中找出一条增广路(augmenting path),让路径的起点和终点都是还没有匹配过的点,并且路径经过的连线是一条没被匹配、一条已经匹配过,再下一条又没匹配这样交替地出现。
找到这样的路径后,显然路径里没被匹配的连线比已经匹配了的连线多一条,于是修改匹配图,把路径里所有匹配过的连线去掉匹配关系,把没有匹配的连线变成匹配的,这样匹配数就比原来多 \(1\) 个。
不断执行上述操作,直到找不到这样的路径为止。
时间复杂度 \(O(VE)\)。
int mat[N], v[N], cnt; // N 为左子图的大小,v 为时间戳
bool hungary(int x, int vt) {
for (register int i=head[x]; i; i=nex[i]) if (v[to[i]]网络流解二分图匹配:参见上面 [[网络流]] 部分。