YOLOv5与Swin-Transformer的结合
Swin-Transformer在计算机视觉的各个下游任务上都取得了很好的效果,而YOLO系列(尤其是v5、v7、v8)更是目标检测领域的最常见的检测器。本文将YOLOv5的骨干提取网络换成Swin-Transformer(v7/v8同样)。
Swin-Transformer的详细了解可参考朱老师的Swin-Transformer论文精读和b站大佬霹雳吧啦的网络结构解读。
更换教程(基于官方ultralytics代码实现)
在yolov5/models文件夹下,新建swintransformer.py,将下述实现Swin-Transformer的代码拷贝进去(https://github.com/microsoft/Swin-Transformer)
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.checkpoint as checkpoint
import numpy as np
from typing import Optional
def drop_path_f(x, drop_prob: float = 0., training: bool = False):
"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).
This is the same as the DropConnect impl I created for EfficientNet, etc networks, however,
the original name is misleading as 'Drop Connect' is a different form of dropout in a separate paper...
See discussion: https://github.com/tensorflow/tpu/issues/494#issuecomment-532968956 ... I've opted for
changing the layer and argument names to 'drop path' rather than mix DropConnect as a layer name and use
'survival rate' as the argument.
"""
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
shape = (x.shape[0],) + (1,) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNets
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)
random_tensor.floor_() # binarize
output = x.div(keep_prob) * random_tensor
return output
class DropPath(nn.Module):
"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).
"""
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def forward(self, x):
return drop_path_f(x, self.drop_prob, self.training)
def window_partition(x, window_size: int):
"""
将feature map按照window_size划分成一个个没有重叠的window
Args:
x: (B, H, W, C)
window_size (int): window size(M)
Returns:
windows: (num_windows*B, window_size, window_size, C)
"""
B, H, W, C = x.shape
x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
# permute: [B, H//Mh, Mh, W//Mw, Mw, C] -> [B, H//Mh, W//Mh, Mw, Mw, C]
# view: [B, H//Mh, W//Mw, Mh, Mw, C] -> [B*num_windows, Mh, Mw, C]
windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
return windows
def window_reverse(windows, window_size: int, H: int, W: int):
"""
将一个个window还原成一个feature map
Args:
windows: (num_windows*B, window_size, window_size, C)
window_size (int): Window size(M)
H (int): Height of image
W (int): Width of image
Returns:
x: (B, H, W, C)
"""
B = int(windows.shape[0] / (H * W / window_size / window_size))
# view: [B*num_windows, Mh, Mw, C] -> [B, H//Mh, W//Mw, Mh, Mw, C]
x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
# permute: [B, H//Mh, W//Mw, Mh, Mw, C] -> [B, H//Mh, Mh, W//Mw, Mw, C]
# view: [B, H//Mh, Mh, W//Mw, Mw, C] -> [B, H, W, C]
x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
return x
class Mlp(nn.Module):
""" MLP as used in Vision Transformer, MLP-Mixer and related networks
"""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.drop1 = nn.Dropout(drop)
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop2 = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop1(x)
x = self.fc2(x)
x = self.drop2(x)
return x
class WindowAttention(nn.Module):
r""" Window based multi-head self attention (W-MSA) module with relative position bias.
It supports both of shifted and non-shifted window.
Args:
dim (int): Number of input channels.
window_size (tuple[int]): The height and width of the window.
num_heads (int): Number of attention heads.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
attn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0
proj_drop (float, optional): Dropout ratio of output. Default: 0.0
"""
def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.):
super().__init__()
self.dim = dim
self.window_size = window_size # [Mh, Mw]
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = head_dim ** -0.5
# define a parameter table of relative position bias
self.relative_position_bias_table = nn.Parameter(
torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # [2*Mh-1 * 2*Mw-1, nH]
# get pair-wise relative position index for each token inside the window
coords_h = torch.arange(self.window_size[0])
coords_w = torch.arange(self.window_size[1])
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # [2, Mh, Mw]
coords_flatten = torch.flatten(coords, 1) # [2, Mh*Mw]
# [2, Mh*Mw, 1] - [2, 1, Mh*Mw]
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # [2, Mh*Mw, Mh*Mw]
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # [Mh*Mw, Mh*Mw, 2]
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
relative_coords[:, :, 1] += self.window_size[1] - 1
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
relative_position_index = relative_coords.sum(-1) # [Mh*Mw, Mh*Mw]
self.register_buffer("relative_position_index", relative_position_index)
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
nn.init.trunc_normal_(self.relative_position_bias_table, std=.02)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x, mask: Optional[torch.Tensor] = None):
"""
Args:
x: input features with shape of (num_windows*B, Mh*Mw, C)
mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None
"""
# [batch_size*num_windows, Mh*Mw, total_embed_dim]
B_, N, C = x.shape
# qkv(): -> [batch_size*num_windows, Mh*Mw, 3 * total_embed_dim]
# reshape: -> [batch_size*num_windows, Mh*Mw, 3, num_heads, embed_dim_per_head]
# permute: -> [3, batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]
qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4).contiguous()
# [batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]
q, k, v = qkv.unbind(0) # make torchscript happy (cannot use tensor as tuple)
# transpose: -> [batch_size*num_windows, num_heads, embed_dim_per_head, Mh*Mw]
# @: multiply -> [batch_size*num_windows, num_heads, Mh*Mw, Mh*Mw]
q = q * self.scale
attn = (q @ k.transpose(-2, -1))
# relative_position_bias_table.view: [Mh*Mw*Mh*Mw,nH] -> [Mh*Mw,Mh*Mw,nH]
relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1)
relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # [nH, Mh*Mw, Mh*Mw]
attn = attn + relative_position_bias.unsqueeze(0)
if mask is not None:
# mask: [nW, Mh*Mw, Mh*Mw]
nW = mask.shape[0] # num_windows
# attn.view: [batch_size, num_windows, num_heads, Mh*Mw, Mh*Mw]
# mask.unsqueeze: [1, nW, 1, Mh*Mw, Mh*Mw]
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
attn = attn.view(-1, self.num_heads, N, N)
attn = self.softmax(attn)
else:
attn = self.softmax(attn)
attn = self.attn_drop(attn)
# @: multiply -> [batch_size*num_windows, num_heads, Mh*Mw, embed_dim_per_head]
# transpose: -> [batch_size*num_windows, Mh*Mw, num_heads, embed_dim_per_head]
# reshape: -> [batch_size*num_windows, Mh*Mw, total_embed_dim]
x = (attn @ v).transpose(1, 2).reshape(B_, N, C).to(torch.float)
x = self.proj(x)
x = self.proj_drop(x)
return x
class SwinTransformerBlock(nn.Module):
r""" Swin Transformer Block.
Args:
dim (int): Number of input channels.
num_heads (int): Number of attention heads.
window_size (int): Window size.
shift_size (int): Shift size for SW-MSA.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
drop (float, optional): Dropout rate. Default: 0.0
attn_drop (float, optional): Attention dropout rate. Default: 0.0
drop_path (float, optional): Stochastic depth rate. Default: 0.0
act_layer (nn.Module, optional): Activation layer. Default: nn.GELU
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
"""
def __init__(self, dim, num_heads, window_size=7, shift_size=0,
mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0.,
act_layer=nn.GELU, norm_layer=nn.LayerNorm):
super().__init__()
self.dim = dim
self.num_heads = num_heads
self.window_size = window_size
self.shift_size = shift_size
self.mlp_ratio = mlp_ratio
assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
self.norm1 = norm_layer(dim)
self.attn = WindowAttention(
dim, window_size=(self.window_size, self.window_size), num_heads=num_heads, qkv_bias=qkv_bias,
attn_drop=attn_drop, proj_drop=drop)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
def forward(self, x, attn_mask):
H, W = self.H, self.W
B, L, C = x.shape
assert L == H * W, "input feature has wrong size"
shortcut = x
x = self.norm1(x)
x = x.view(B, H, W, C)
# pad feature maps to multiples of window size
# 把feature map给pad到window size的整数倍
pad_l = pad_t = 0
pad_r = (self.window_size - W % self.window_size) % self.window_size
pad_b = (self.window_size - H % self.window_size) % self.window_size
x = F.pad(x, (0, 0, pad_l, pad_r, pad_t, pad_b))
_, Hp, Wp, _ = x.shape
# cyclic shift
if self.shift_size > 0:
shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
else:
shifted_x = x
attn_mask = None
# partition windows
x_windows = window_partition(shifted_x, self.window_size) # [nW*B, Mh, Mw, C]
x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # [nW*B, Mh*Mw, C]
# W-MSA/SW-MSA
attn_windows = self.attn(x_windows, mask=attn_mask) # [nW*B, Mh*Mw, C]
# merge windows
attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C) # [nW*B, Mh, Mw, C]
shifted_x = window_reverse(attn_windows, self.window_size, Hp, Wp) # [B, H', W', C]
# reverse cyclic shift
if self.shift_size > 0:
x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
else:
x = shifted_x
if pad_r > 0 or pad_b > 0:
# 把前面pad的数据移除掉
x = x[:, :H, :W, :].contiguous()
x = x.view(B, H * W, C)
# FFN
x = shortcut + self.drop_path(x)
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
class SwinStage(nn.Module):
"""
A basic Swin Transformer layer for one stage.
Args:
dim (int): Number of input channels.
depth (int): Number of blocks.
num_heads (int): Number of attention heads.
window_size (int): Local window size.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
drop (float, optional): Dropout rate. Default: 0.0
attn_drop (float, optional): Attention dropout rate. Default: 0.0
drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
downsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: None
use_checkpoint (bool): Whether to use checkpointing to save memory. Default: False.
"""
def __init__(self, dim, c2, depth, num_heads, window_size,
mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0.,
drop_path=0., norm_layer=nn.LayerNorm, use_checkpoint=False):
super().__init__()
assert dim==c2, r"no. in/out channel should be same"
self.dim = dim
self.depth = depth
self.window_size = window_size
self.use_checkpoint = use_checkpoint
self.shift_size = window_size // 2
# build blocks
self.blocks = nn.ModuleList([
SwinTransformerBlock(
dim=dim,
num_heads=num_heads,
window_size=window_size,
shift_size=0 if (i % 2 == 0) else self.shift_size,
mlp_ratio=mlp_ratio,
qkv_bias=qkv_bias,
drop=drop,
attn_drop=attn_drop,
drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path,
norm_layer=norm_layer)
for i in range(depth)])
def create_mask(self, x, H, W):
# calculate attention mask for SW-MSA
# 保证Hp和Wp是window_size的整数倍
Hp = int(np.ceil(H / self.window_size)) * self.window_size
Wp = int(np.ceil(W / self.window_size)) * self.window_size
# 拥有和feature map一样的通道排列顺序,方便后续window_partition
img_mask = torch.zeros((1, Hp, Wp, 1), device=x.device) # [1, Hp, Wp, 1]
h_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
w_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
mask_windows = window_partition(img_mask, self.window_size) # [nW, Mh, Mw, 1]
mask_windows = mask_windows.view(-1, self.window_size * self.window_size) # [nW, Mh*Mw]
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2) # [nW, 1, Mh*Mw] - [nW, Mh*Mw, 1]
# [nW, Mh*Mw, Mh*Mw]
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
return attn_mask
def forward(self, x):
B, C, H, W = x.shape
x = x.permute(0, 2, 3, 1).contiguous().view(B, H*W, C)
attn_mask = self.create_mask(x, H, W) # [nW, Mh*Mw, Mh*Mw]
for blk in self.blocks:
blk.H, blk.W = H, W
if not torch.jit.is_scripting() and self.use_checkpoint:
x = checkpoint.checkpoint(blk, x, attn_mask)
else:
x = blk(x, attn_mask)
x = x.view(B, H, W, C)
x = x.permute(0, 3, 1, 2).contiguous()
return x
class PatchEmbed(nn.Module):
"""
2D Image to Patch Embedding
"""
def __init__(self, in_c=3, embed_dim=96, patch_size=4, norm_layer=None):
super().__init__()
patch_size = (patch_size, patch_size)
self.patch_size = patch_size
self.in_chans = in_c
self.embed_dim = embed_dim
self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()
def forward(self, x):
_, _, H, W = x.shape
# padding
# 如果输入图片的H,W不是patch_size的整数倍,需要进行padding
pad_input = (H % self.patch_size[0] != 0) or (W % self.patch_size[1] != 0)
if pad_input:
# to pad the last 3 dimensions,
# (W_left, W_right, H_top,H_bottom, C_front, C_back)
x = F.pad(x, (0, self.patch_size[1] - W % self.patch_size[1],
0, self.patch_size[0] - H % self.patch_size[0],
0, 0))
# 下采样patch_size倍
x = self.proj(x)
B, C, H, W = x.shape
# flatten: [B, C, H, W] -> [B, C, HW]
# transpose: [B, C, HW] -> [B, HW, C]
x = x.flatten(2).transpose(1, 2)
x = self.norm(x)
# view: [B, HW, C] -> [B, H, W, C]
# permute: [B, H, W, C] -> [B, C, H, W]
x = x.view(B, H, W, C)
x = x.permute(0, 3, 1, 2).contiguous()
return x
class PatchMerging(nn.Module):
r""" Patch Merging Layer.
Args:
dim (int): Number of input channels.
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
"""
def __init__(self, dim, c2, norm_layer=nn.LayerNorm):
super().__init__()
assert c2==(2 * dim), r"no. out channel should be 2 * no. in channel "
self.dim = dim
self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)
self.norm = norm_layer(4 * dim)
def forward(self, x):
"""
x: B, C, H, W
"""
B, C, H, W = x.shape
# assert L == H * W, "input feature has wrong size"
x = x.permute(0, 2, 3, 1).contiguous()
# x = x.view(B, H*W, C)
# padding
# 如果输入feature map的H,W不是2的整数倍,需要进行padding
pad_input = (H % 2 == 1) or (W % 2 == 1)
if pad_input:
# to pad the last 3 dimensions, starting from the last dimension and moving forward.
# (C_front, C_back, W_left, W_right, H_top, H_bottom)
# 注意这里的Tensor通道是[B, H, W, C],所以会和官方文档有些不同
x = F.pad(x, (0, 0, 0, W % 2, 0, H % 2))
x0 = x[:, 0::2, 0::2, :] # [B, H/2, W/2, C]
x1 = x[:, 1::2, 0::2, :] # [B, H/2, W/2, C]
x2 = x[:, 0::2, 1::2, :] # [B, H/2, W/2, C]
x3 = x[:, 1::2, 1::2, :] # [B, H/2, W/2, C]
x = torch.cat([x0, x1, x2, x3], -1) # [B, H/2, W/2, 4*C]
x = x.view(B, -1, 4 * C) # [B, H/2*W/2, 4*C]
x = self.norm(x)
x = self.reduction(x) # [B, H/2*W/2, 2*C]
x = x.view(B, int(H/2), int(W/2), C*2)
x = x.permute(0, 3, 1, 2).contiguous()
return x接着在models/yolo.py中导入相关模块
from models.swintransformer import SwinStage, PatchMerging, PatchEmbed
在 models/yolo.py的318行左右还需要插入相关模块

(注意,除了新建swintransformer.py外,还可以将Swin-Transformer的代码全部拷贝到models/common.py中,此时不需要在yolo.py中导入相关模块,源代码中common.py已经由"from models.common import * " 全部导入)
然后配置自己的yaml文件,我们直接在yolov5l.yaml中配置
# YOLOv5 by Ultralytics, GPL-3.0 license
# Parameters
nc: 6 # number of classes
depth_multiple: 1 # model depth multiple
width_multiple: 1 # layer channel multiple
anchors:
- [19,14, 32,42, 190,16] # P3/8
- [59,57, 45,105, 408,15] # P4/16
- [65,155, 117,161, 252,153] # P5/32
## YOLOv5 v6.0 backbone
#backbone:
# # [from, number, module, args]
# [[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
# [-1, 1, Conv, [128, 3, 2]], # 1-P2/4
# [-1, 3, C3, [128]],
# [-1, 1, Conv, [256, 3, 2]], # 3-P3/8
# [-1, 6, C3, [256]],
# [-1, 1, Conv, [512, 3, 2]], # 5-P4/16
# [-1, 9, C3, [512]],
# [-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
# [-1, 3, C3, [1024]],
# [-1, 1, SPPF, [1024, 5]], # 9
# ]
#
## YOLOv5 v6.0 head
#head:
# [[-1, 1, Conv, [512, 1, 1]],
# [-1, 1, nn.Upsample, [None, 2, 'nearest']],
# [[-1, 6], 1, Concat, [1]], # cat backbone P4
# [-1, 3, C3, [512, False]], # 13
#
# [-1, 1, Conv, [256, 1, 1]],
# [-1, 1, nn.Upsample, [None, 2, 'nearest']],
# [[-1, 4], 1, Concat, [1]], # cat backbone P3
# [-1, 3, C3, [256, False]], # 17 (P3/8-small)
#
# [-1, 1, Conv, [256, 3, 2]],
# [[-1, 14], 1, Concat, [1]], # cat head P4
# [-1, 3, C3, [512, False]], # 20 (P4/16-medium)
#
# [-1, 1, Conv, [512, 3, 2]],
# [[-1, 10], 1, Concat, [1]], # cat head P5
# [-1, 3, C3, [1024, False]], # 23 (P5/32-large)
#
# [[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
# ]
#backbone shuffle
#backbone:
# # [from, number, module, args]
# [[-1, 1, CBRM, [32]], # 0-P1/4
# [-1, 1, Shuffle_Block, [128, 2]], # 1-P2/8
# [-1, 3, Shuffle_Block, [128, 1]],
# [-1, 1, Shuffle_Block, [256, 2]], # 3-P3/16
# [-1, 7, Shuffle_Block, [256, 1]],
# [-1, 1, Shuffle_Block, [512, 2]], # 5-P4/32
# [-1, 3, Shuffle_Block, [512, 1]],
# ]
#
## YOLOv5 v6.0 head
#head:
# [[-1, 1, Conv, [256, 1, 1]],
# [-1, 1, nn.Upsample, [None, 2, 'nearest']],
# [[-1, 4], 1, Concat, [1]], # cat backbone P4
# [-1, 1, C2f, [256, False]], # 10
#
# [-1, 1, Conv, [128, 1, 1]],
# [-1, 1, nn.Upsample, [None, 2, 'nearest']],
# [[-1, 2], 1, Concat, [1]], # cat backbone P3
# [-1, 1, C2f, [128, False]], # 14 (P3/8-small)
#
# [-1, 1, Conv, [128, 3, 2]],
# [[-1, 11], 1, Concat, [1]], # cat head P4
# [-1, 1, C2f, [256, False]], # 17 (P4/16-medium)
#
# [-1, 1, Conv, [256, 3, 2]],
# [[-1, 7], 1, Concat, [1]], # cat head P5
# [-1, 1, C2f, [512, False]], # 20 (P5/32-large)
#
# [[14, 17, 20], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
# ]
##backbone shuffle SE
#backbone:
# # [from, number, module, args]
# [[-1, 1, CBRM, [32]], # 0-P1/4
# [-1, 1, Shuffle_Block, [128, 2]], # 1-P2/8
# [-1, 3, Shuffle_Block, [128, 1]],
# [-1, 1, Shuffle_Block, [256, 2]], # 3-P3/16
# [-1, 7, Shuffle_Block, [256, 1]],
# [-1, 1, Shuffle_Block, [512, 2]], # 5-P4/32
# [-1, 3, Shuffle_Block, [512, 1]],
# ]
#
## YOLOv5 v6.0 head
#head:
# [[-1, 1, Conv, [256, 1, 1]],
# [-1, 1, nn.Upsample, [None, 2, 'nearest']],
# [[-1, 4], 1, Concat, [1]], # cat backbone P4
# [-1, 1, CoordAtt, [512]],
# [-1, 1, C2f, [256, False]], # 10
#
# [-1, 1, Conv, [128, 1, 1]],
# [-1, 1, nn.Upsample, [None, 2, 'nearest']],
# [[-1, 2], 1, Concat, [1]], # cat backbone P3
# [-1, 1, CoordAtt, [256]],
# [-1, 1, C2f, [128, False]], # 14 (P3/8-small)
#
# [-1, 1, Conv, [128, 3, 2]],
# [[-1, 12], 1, Concat, [1]], # cat head P4
# [-1, 1, CoordAtt, [256]],
# [-1, 1, C2f, [256, False]], # 17 (P4/16-medium)
#
# [-1, 1, Conv, [256, 3, 2]],
# [[-1, 7], 1, Concat, [1]], # cat head P5
# [-1, 1, CoordAtt, [512]],
# [-1, 1, C2f, [512, False]], # 20 (P5/32-large)
#
# [[16, 20, 24], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
# ]
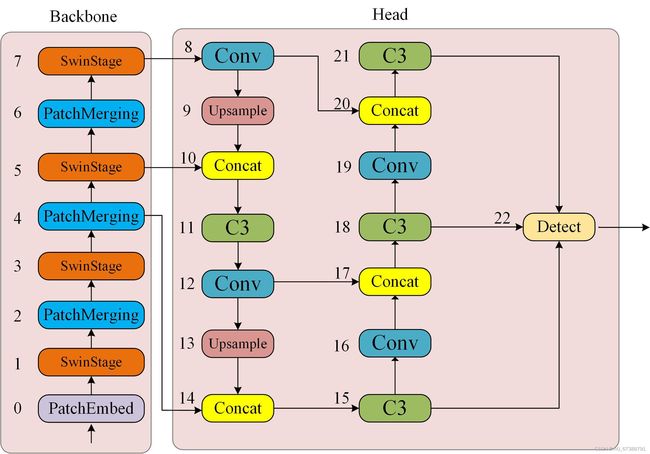
# Swin-Transformer-Tiny backbone
backbone:
# [from, number, module, args]
# input [b, 1, 640, 640]
[[-1, 1, PatchEmbed, [96, 4]], # 0 [b, 96, 160, 160]
[-1, 1, SwinStage, [96, 2, 3, 7]], # 1 [b, 96, 160, 160]
[-1, 1, PatchMerging, [192]], # 2 [b, 192, 80, 80]
[-1, 1, SwinStage, [192, 2, 6, 7]], # 3 --F0-- [b, 192, 80, 80]
[ -1, 1, PatchMerging, [384]], # 4 [b, 384, 40, 40]
[ -1, 1, SwinStage, [384, 6, 12, 7]], # 5 --F1-- [b, 384, 40, 40]
[ -1, 1, PatchMerging, [768]], # 6 [b, 768, 20, 20]
[ -1, 1, SwinStage, [768, 2, 24, 7]], # 7 --F2-- [b, 768, 20, 20]
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 5], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 11
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 3], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 15 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 12], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 18 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 8], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 21 (P5/32-large)
[[15, 18, 21], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
在backbone中,参数[from, number, module, args]分别表示:
- from-该层的输入来自哪一层,(从0开始编号),-1表示来自上一层
- number-该层的重复次数
- module-当前使用模块名称
- args-模块的参数
对于SwinStage模块参数如下
yaml文件中的[-1, 1, SwinStage, [96, 2, 3, 7]]表示:
- -1-输入来自上一层
- 1-SwinStage重复1次
- SwinStage-使用的模块
- [96, 2, 3, 7]-分别代表输入通道dim之后的c2,depth,num_heads,window_size
对于PatchMerging模块参数如下:

yaml文件中的[-1, 1, PatchMerging, [192]]中的192代表dim后面的c2
打印模型
运行models/yolo.py,将yaml文件换为更改的yolov5l.yaml,打印模型的信息

训练过程与原始YOLOv5的训练过程相同,不在赘述。下面是可能遇到的一些错误
错误1:
TypeError: meshgrid() got an unexpected keyword argument ‘indexing‘torch版本原因,解决办法
coords = torch.stack(torch.meshgrid([coords_h, coords_w]),indexing="ij")#原先代码
coords = torch.stack(torch.meshgrid([coords_h, coords_w]))#删除indexing="ij"错误2:
RuntimeError: expected scalar type Half but found Float训练过程val阶段会使用half评估,把train.py里面353行的half=amp改成half=False,这样就可以训练起来了。训练结束后还有一次验证,把414行的half()去掉。


网络结构图