基于LQR算法的一阶倒立摆控制
1. 一阶倒立摆建模

2. 数学模型
倒立摆的受力分析网上有很多,这里就不再叙述。直接放线性化后的方程:
F = (M+m)x″-mLφ″
(I+mL²)φ″= mLx″+ mgLφ
(F为外力,x为物块位移,M,m为物块和摆杆的质量,φ为摆杆相对竖直向上方向的角度)
然后建立状态控制方程:
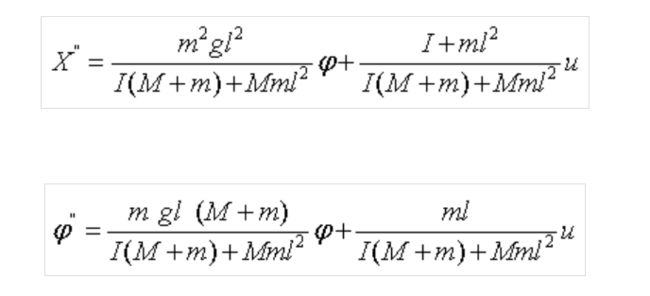
得到状态矩阵为:

3. python代码
# lqr.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import control
import numpy as np
M = 1.0 # 小车质量
m = 1.0 # 摆杆质量
g = 9.8 # 重力加速度
L = 2.0 # 摆杆长度
I = 1.0 / 3.0 * m * (L*L) # 均质摆杆转动惯量
print("I is: ", I)
A_23 = -(m*m) * (L*L) * g / (I * (M + m) + M * m * (L*L))
A_43 = (M + m) * m * g * L / (I * (M + m) + M * m * (L*L))
print("A_23 is: ", A_23)
print("A_43 is: ", A_43)
B_2 = (I + m * (L*L)) / (I * (M + m) + M * m * (L*L))
B_4 = -m * L / (I * (M + m) + M * m * (L*L))
print("B_2 is: ", B_2)
print("B_4 is: ", B_4)
A = np.array([[0, 1, 0, 0],
[0, 0, A_23, 0],
[0, 0, 0, 1],
[0, 0, A_43, 0]])
# B = np.array([[0], [B_2], [0], [B_4]])
_B = np.array([0, B_2, 0, B_4])
B = _B.reshape(_B.shape[0],1)
Q = np.array([[100, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 100, 0],
[0, 0, 0, 1]])
R = 10
K = control.lqr(A, B, Q, R)
print("K is: ", K)
执行结果:
$ ./lqr.py
I is: 1.3333333333333333
A_23 is: -5.880000000000001
A_43 is: 5.880000000000001
B_2 is: 0.8
B_4 is: -0.30000000000000004
K is: (array([[ -3.16227766, -6.43571648, -83.62359638, -39.56913008]]), array([[ 203.5152246 , 206.59223321, 1251.28576097, 656.32187724],
[ 206.59223321, 292.76442691, 1890.23514953, 995.22902118],
[ 1251.28576097, 1890.23514953, 15580.3357274 , 7828.080278 ],
[ 656.32187724, 995.22902118, 7828.080278 , 3972.91505928]]), array([-2.38935921+0.27045155j, -2.38935921-0.27045155j,
-0.97172371+0.81464125j, -0.97172371-0.81464125j]))
参考:
一阶倒立摆simscape建模